 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHanging Around: Cognitive Inspired Reasoning for Reactive Robotics
Jul 28, 2025Situationally-aware artificial agents operating with competence in natural environments face several challenges: spatial awareness, object affordance detection, dynamic changes and unpredictability. A critical challenge is the agent's ability to identify and monitor environmental elements pertinent to its objectives. Our research introduces a neurosymbolic modular architecture for reactive robotics. Our system combines a neural component performing object recognition over the environment and image processing techniques such as optical flow, with symbolic representation and reasoning. The reasoning system is grounded in the embodied cognition paradigm, via integrating image schematic knowledge in an ontological structure. The ontology is operatively used to create queries for the perception system, decide on actions, and infer entities' capabilities derived from perceptual data. The combination of reasoning and image processing allows the agent to focus its perception for normal operation as well as discover new concepts for parts of objects involved in particular interactions. The discovered concepts allow the robot to autonomously acquire training data and adjust its subsymbolic perception to recognize the parts, as well as making planning for more complex tasks feasible by focusing search on those relevant object parts. We demonstrate our approach in a simulated world, in which an agent learns to recognize parts of objects involved in support relations. While the agent has no concept of handle initially, by observing examples of supported objects hanging from a hook it learns to recognize the parts involved in establishing support and becomes able to plan the establishment/destruction of the support relation. This underscores the agent's capability to expand its knowledge through observation in a systematic way, and illustrates the potential of combining deep reasoning [...].
* This article is published online with Open Access by IOS Press and distributed under the terms of the Creative Commons Attribution Non-Commercial License 4.0 (CC BY-NC 4.0)
The Wilhelm Tell Dataset of Affordance Demonstrations
Jul 23, 2025Affordances - i.e. possibilities for action that an environment or objects in it provide - are important for robots operating in human environments to perceive. Existing approaches train such capabilities on annotated static images or shapes. This work presents a novel dataset for affordance learning of common household tasks. Unlike previous approaches, our dataset consists of video sequences demonstrating the tasks from first- and third-person perspectives, along with metadata about the affordances that are manifested in the task, and is aimed towards training perception systems to recognize affordance manifestations. The demonstrations were collected from several participants and in total record about seven hours of human activity. The variety of task performances also allows studying preparatory maneuvers that people may perform for a task, such as how they arrange their task space, which is also relevant for collaborative service robots.
* \c{opyright} 2025 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
MineInsight: A Multi-sensor Dataset for Humanitarian Demining Robotics in Off-Road Environments
Jun 05, 2025The use of robotics in humanitarian demining increasingly involves computer vision techniques to improve landmine detection capabilities. However, in the absence of diverse and realistic datasets, the reliable validation of algorithms remains a challenge for the research community. In this paper, we introduce MineInsight, a publicly available multi-sensor, multi-spectral dataset designed for off-road landmine detection. The dataset features 35 different targets (15 landmines and 20 commonly found objects) distributed along three distinct tracks, providing a diverse and realistic testing environment. MineInsight is, to the best of our knowledge, the first dataset to integrate dual-view sensor scans from both an Unmanned Ground Vehicle and its robotic arm, offering multiple viewpoints to mitigate occlusions and improve spatial awareness. It features two LiDARs, as well as images captured at diverse spectral ranges, including visible (RGB, monochrome), visible short-wave infrared (VIS-SWIR), and long-wave infrared (LWIR). Additionally, the dataset comes with an estimation of the location of the targets, offering a benchmark for evaluating detection algorithms. We recorded approximately one hour of data in both daylight and nighttime conditions, resulting in around 38,000 RGB frames, 53,000 VIS-SWIR frames, and 108,000 LWIR frames. MineInsight serves as a benchmark for developing and evaluating landmine detection algorithms. Our dataset is available at https://github.com/mariomlz99/MineInsight.
Safe-Planner: A Single-Outcome Replanner for Computing Strong Cyclic Policies in Fully Observable Non-Deterministic Domains
Sep 23, 2021
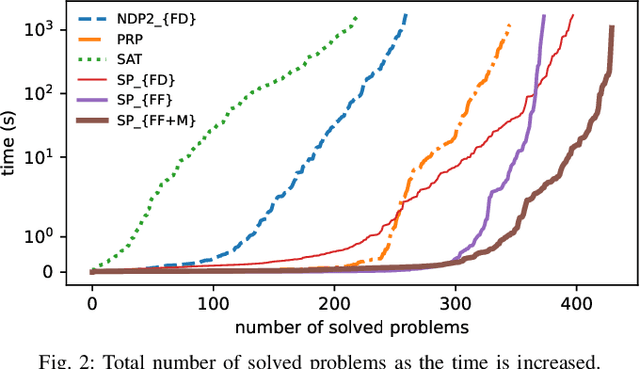
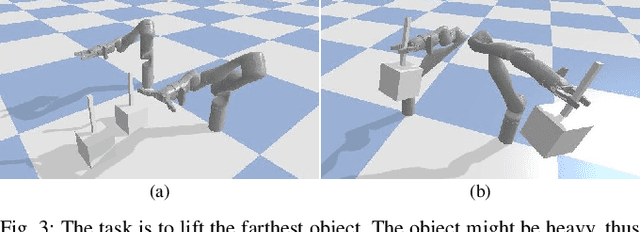
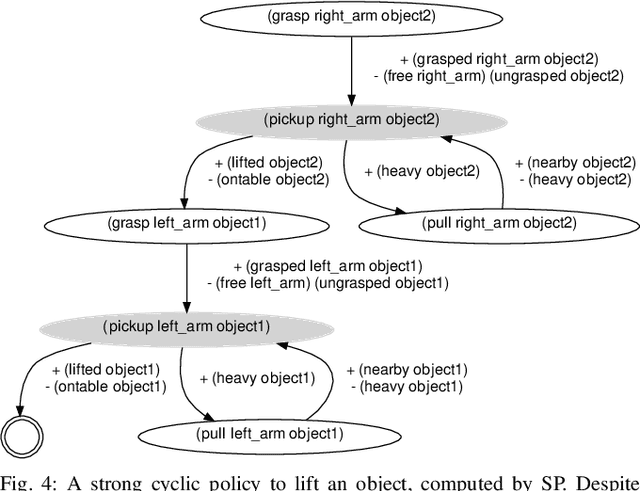
Replanners are efficient methods for solving non-deterministic planning problems. Despite showing good scalability, existing replanners often fail to solve problems involving a large number of misleading plans, i.e., weak plans that do not lead to strong solutions, however, due to their minimal lengths, are likely to be found at every replanning iteration. The poor performance of replanners in such problems is due to their all-outcome determinization. That is, when compiling from non-deterministic to classical, they include all compiled classical operators in a single deterministic domain which leads replanners to continually generate misleading plans. We introduce an offline replanner, called Safe-Planner (SP), that relies on a single-outcome determinization to compile a non-deterministic domain to a set of classical domains, and ordering heuristics for ranking the obtained classical domains. The proposed single-outcome determinization and the heuristics allow for alternating between different classical domains. We show experimentally that this approach can allow SP to avoid generating misleading plans but to generate weak plans that directly lead to strong solutions. The experiments show that SP outperforms state-of-the-art non-deterministic solvers by solving a broader range of problems. We also validate the practical utility of SP in real-world non-deterministic robotic tasks.
An evolutionary algorithm for online, resource constrained, multi-vehicle sensing mission planning
Jan 10, 2018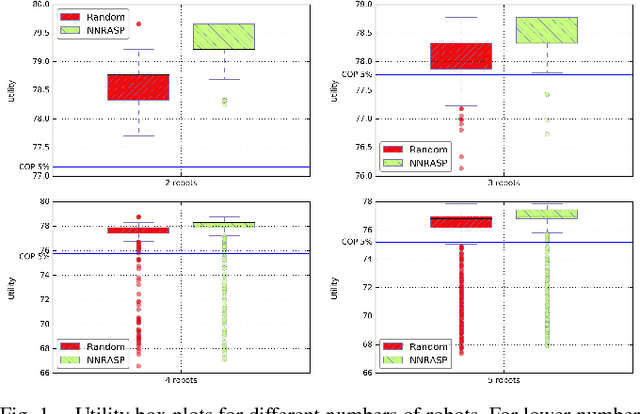
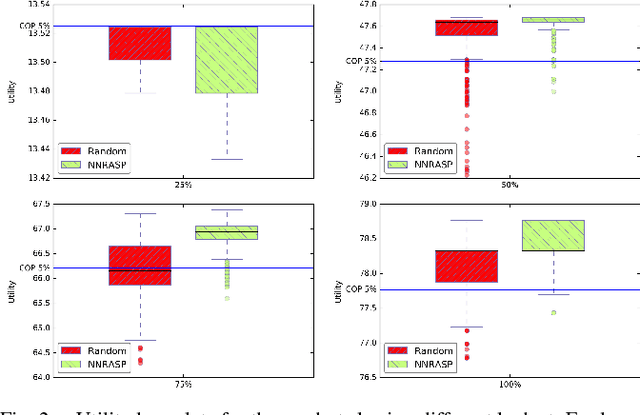
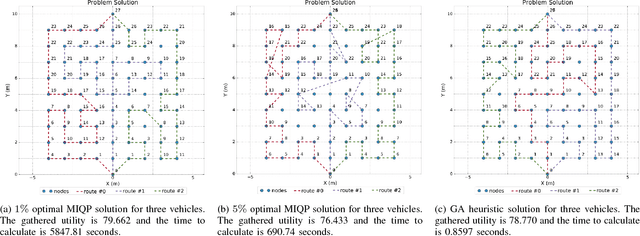
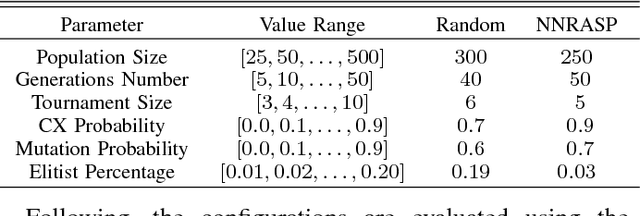
Mobile robotic platforms are an indispensable tool for various scientific and industrial applications. Robots are used to undertake missions whose execution is constrained by various factors, such as the allocated time or their remaining energy. Existing solutions for resource constrained multi-robot sensing mission planning provide optimal plans at a prohibitive computational complexity for online application [1],[2],[3]. A heuristic approach exists for an online, resource constrained sensing mission planning for a single vehicle [4]. This work proposes a Genetic Algorithm (GA) based heuristic for the Correlated Team Orienteering Problem (CTOP) that is used for planning sensing and monitoring missions for robotic teams that operate under resource constraints. The heuristic is compared against optimal Mixed Integer Quadratic Programming (MIQP) solutions. Results show that the quality of the heuristic solution is at the worst case equal to the 5% optimal solution. The heuristic solution proves to be at least 300 times more time efficient in the worst tested case. The GA heuristic execution required in the worst case less than a second making it suitable for online execution.