 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClassification of spherical objects based on the form function of acoustic echoes
Oct 18, 2019

One way to recognise an object is to study how the echo has been shaped during the interaction with the target. Wideband sonar allows the study of the energy distribution for a large range of frequencies. The frequency distribution contains information about an object, including its inner structure. This information is a key for automatic recognition. The scattering by a target can be quantitatively described by its Form Function. The Form Function can be calculated based on the data of the initial pulse, reflected pulse and parameters of a medium where the pulse is propagating. In this work spherical objects are classified based on their filler material - water or air. We limit the study to spherical 2 layered targets immersed in water. The Form Function is used as a descriptor and fed into a Neural Network classifier, Multilayer Perceptron (MLP). The performance of the classifier is compared with Support Vector Machine (SVM) and the Form Function descriptor is examined in contrast to the Time and Frequency Representation of the echo.
An evolutionary algorithm for online, resource constrained, multi-vehicle sensing mission planning
Jan 10, 2018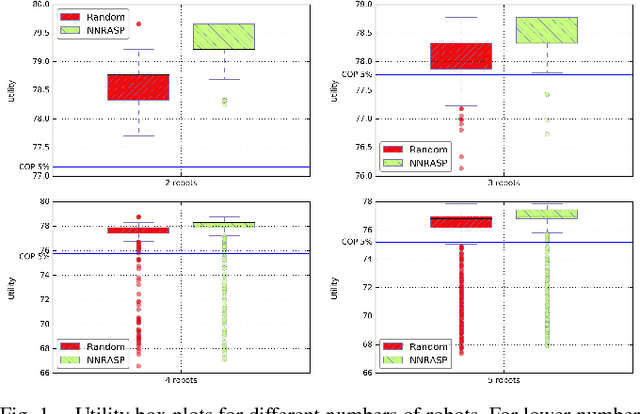
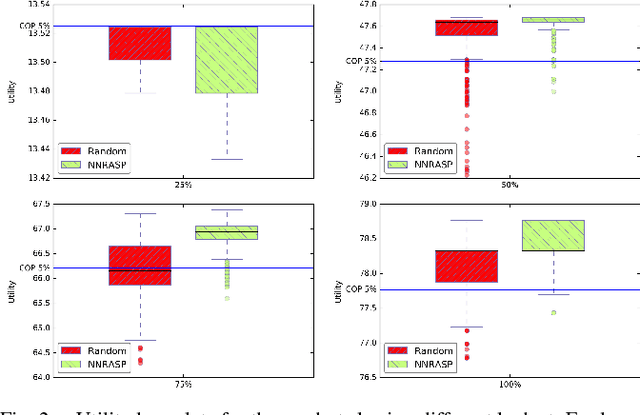
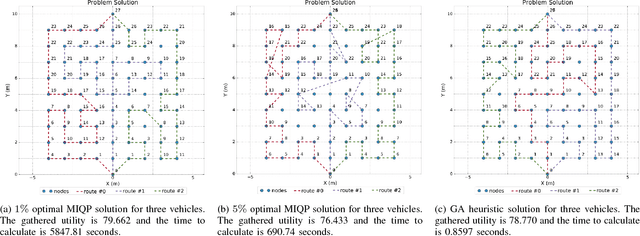
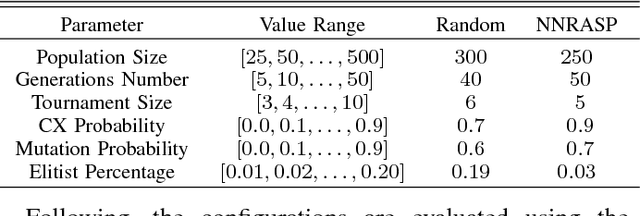
Mobile robotic platforms are an indispensable tool for various scientific and industrial applications. Robots are used to undertake missions whose execution is constrained by various factors, such as the allocated time or their remaining energy. Existing solutions for resource constrained multi-robot sensing mission planning provide optimal plans at a prohibitive computational complexity for online application [1],[2],[3]. A heuristic approach exists for an online, resource constrained sensing mission planning for a single vehicle [4]. This work proposes a Genetic Algorithm (GA) based heuristic for the Correlated Team Orienteering Problem (CTOP) that is used for planning sensing and monitoring missions for robotic teams that operate under resource constraints. The heuristic is compared against optimal Mixed Integer Quadratic Programming (MIQP) solutions. Results show that the quality of the heuristic solution is at the worst case equal to the 5% optimal solution. The heuristic solution proves to be at least 300 times more time efficient in the worst tested case. The GA heuristic execution required in the worst case less than a second making it suitable for online execution.