 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA translational pathway of deep learning methods in GastroIntestinal Endoscopy
Oct 12, 2020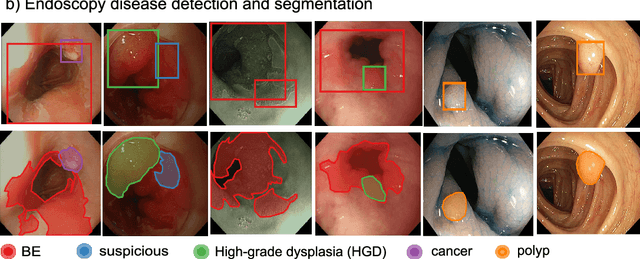
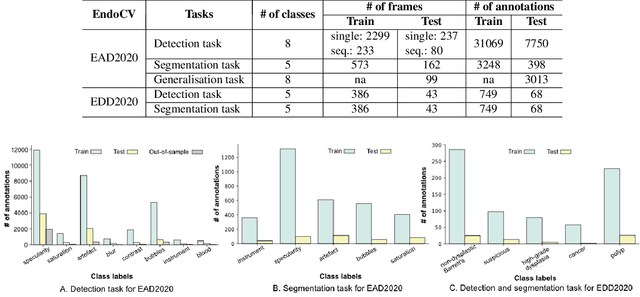
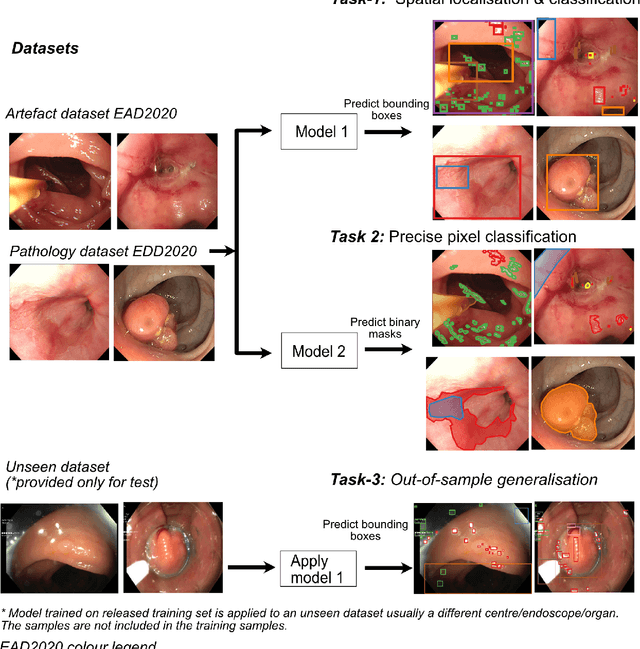
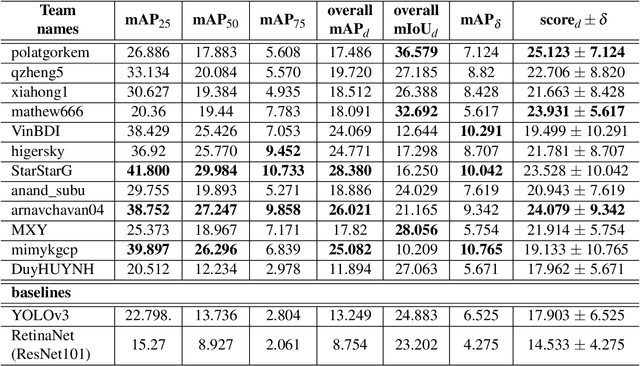
The Endoscopy Computer Vision Challenge (EndoCV) is a crowd-sourcing initiative to address eminent problems in developing reliable computer aided detection and diagnosis endoscopy systems and suggest a pathway for clinical translation of technologies. Whilst endoscopy is a widely used diagnostic and treatment tool for hollow-organs, there are several core challenges often faced by endoscopists, mainly: 1) presence of multi-class artefacts that hinder their visual interpretation, and 2) difficulty in identifying subtle precancerous precursors and cancer abnormalities. Artefacts often affect the robustness of deep learning methods applied to the gastrointestinal tract organs as they can be confused with tissue of interest. EndoCV2020 challenges are designed to address research questions in these remits. In this paper, we present a summary of methods developed by the top 17 teams and provide an objective comparison of state-of-the-art methods and methods designed by the participants for two sub-challenges: i) artefact detection and segmentation (EAD2020), and ii) disease detection and segmentation (EDD2020). Multi-center, multi-organ, multi-class, and multi-modal clinical endoscopy datasets were compiled for both EAD2020 and EDD2020 sub-challenges. An out-of-sample generalisation ability of detection algorithms was also evaluated. Whilst most teams focused on accuracy improvements, only a few methods hold credibility for clinical usability. The best performing teams provided solutions to tackle class imbalance, and variabilities in size, origin, modality and occurrences by exploring data augmentation, data fusion, and optimal class thresholding techniques.
Results from the Robocademy ITN: Autonomy, Disturbance Rejection and Perception for Advanced Marine Robotics
Oct 29, 2019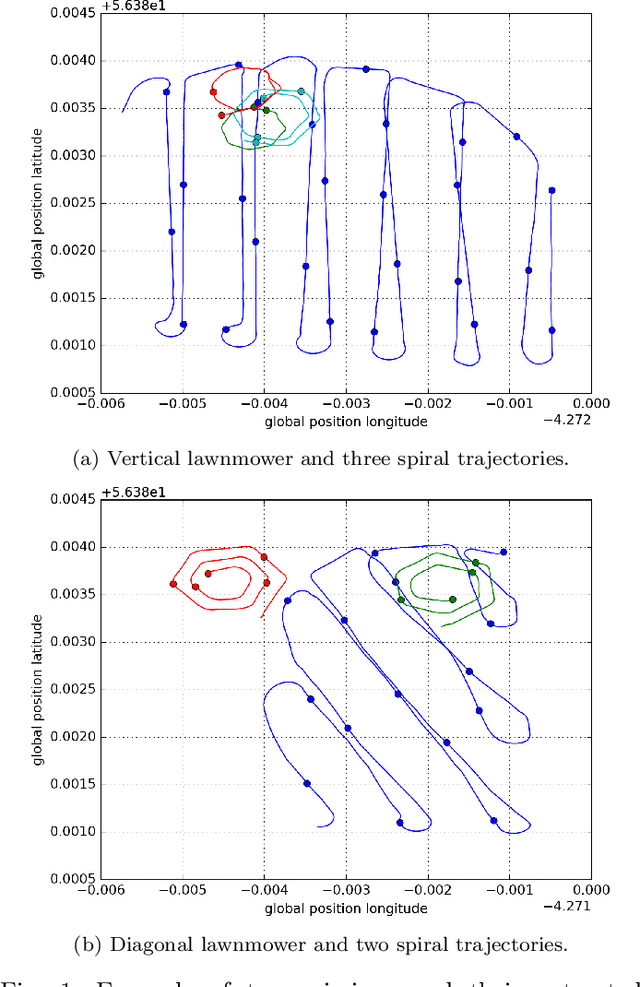
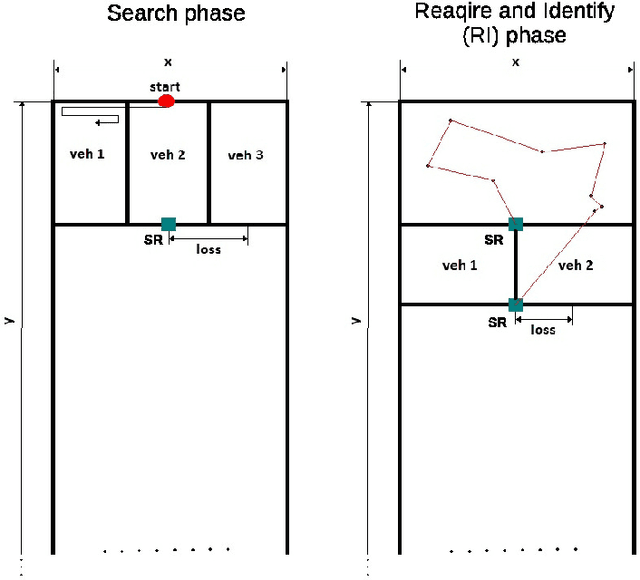

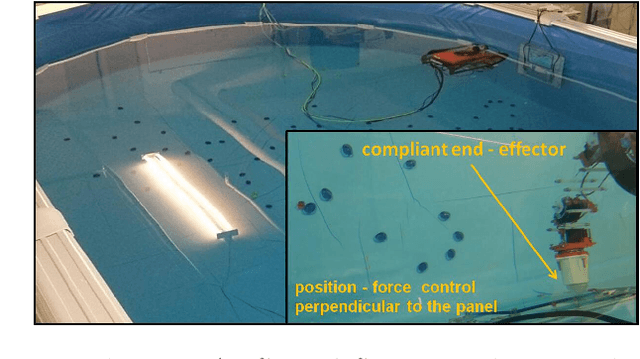
Marine and Underwater resources are important part of the economy of many countries. This requires significant financial resources into their construction and maintentance. Robotics is expected to fill this void, by automating and/or removing humans from hostile environments in order to easily perform maintenance tasks. The Robocademy Marie Sklodowska-Curie Initial Training Network was funded by the European Union's FP7 research program in order to train 13 Fellows into world-leading researchers in Marine and Underwater Robotics. The fellows developed guided research into three areas of key importance: Autonomy, Disturbance Rejection, and Perception. This paper presents a summary of the fellows' research in the three action lines. 71 scientific publications were the primary result of this project, with many other publications currently in the pipeline. Most of the fellows have found employment in Europe, which shows the high demand for this kind of experts. We believe the results from this project are already having an impact in the marine robotics industry, as key technologies are being adopted already.
Classification of spherical objects based on the form function of acoustic echoes
Oct 18, 2019

One way to recognise an object is to study how the echo has been shaped during the interaction with the target. Wideband sonar allows the study of the energy distribution for a large range of frequencies. The frequency distribution contains information about an object, including its inner structure. This information is a key for automatic recognition. The scattering by a target can be quantitatively described by its Form Function. The Form Function can be calculated based on the data of the initial pulse, reflected pulse and parameters of a medium where the pulse is propagating. In this work spherical objects are classified based on their filler material - water or air. We limit the study to spherical 2 layered targets immersed in water. The Form Function is used as a descriptor and fed into a Neural Network classifier, Multilayer Perceptron (MLP). The performance of the classifier is compared with Support Vector Machine (SVM) and the Form Function descriptor is examined in contrast to the Time and Frequency Representation of the echo.