 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain characterisation for online adaptability of automated sonar processing: Lessons learnt from operationally applying ATR to sidescan sonar in MCM applications
Apr 29, 2024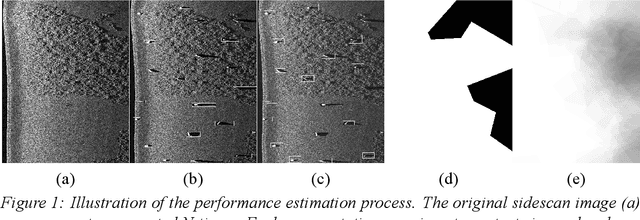
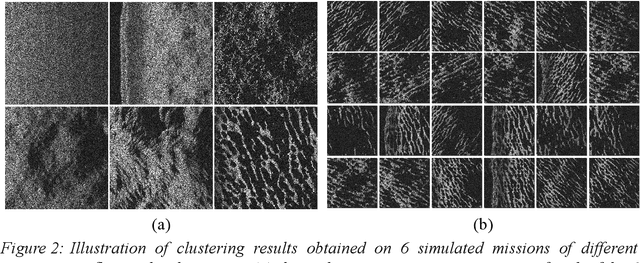
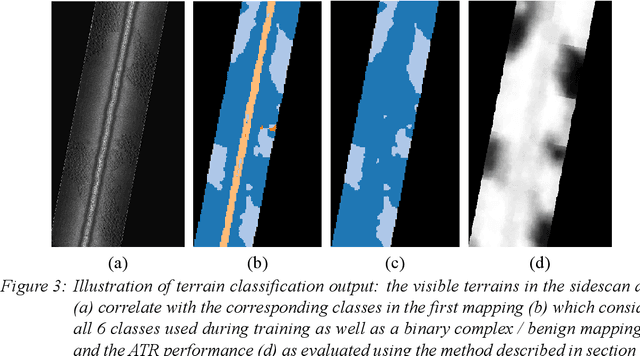
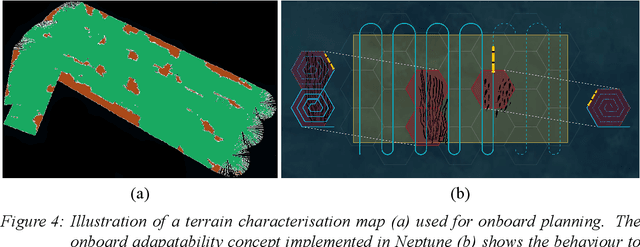
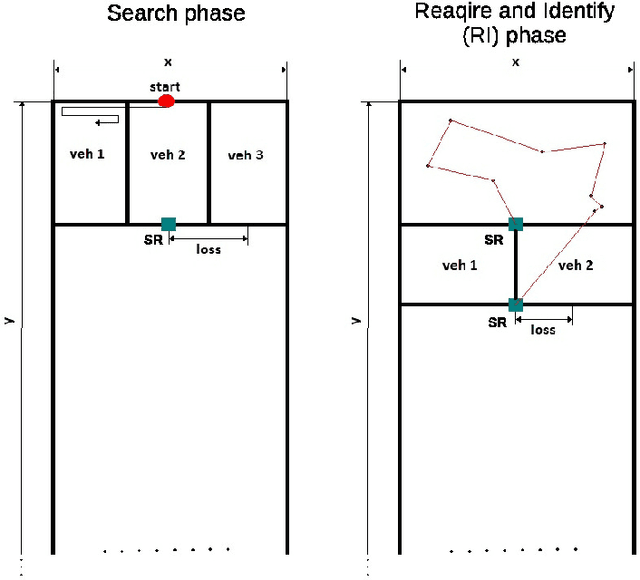
The performance of Automated Recognition (ATR) algorithms on side-scan sonar imagery has shown to degrade rapidly when deployed on non benign environments. Complex seafloors and acoustic artefacts constitute distractors in the form of strong textural patterns, creating false detections or preventing detections of true objects. This paper presents two online seafloor characterisation techniques to improve explainability during Autonomous Underwater Vehicles (AUVs) missions. Importantly and as opposed to previous work in the domain, these techniques are not based on a model and require limited input from human operators, making it suitable for real-time onboard processing. Both techniques rely on an unsupervised machine learning approach to extract terrain features which relate to the human understanding of terrain complexity. The first technnique provides a quantitative, application-driven terrain characterisation metric based on the performance of an ATR algorithm. The second method provides a way to incorporate subject matter expertise and enables contextualisation and explainability in support for scenario-dependent subjective terrain characterisation. The terrain complexity matches the expectation of seasoned users making this tool desirable and trustworthy in comparison to traditional unsupervised approaches. We finally detail an application of these techniques to repair a Mine Countermeasures (MCM) mission carried with SeeByte autonomy framework Neptune.
Similarity-based data mining for online domain adaptation of a sonar ATR system
Sep 16, 2020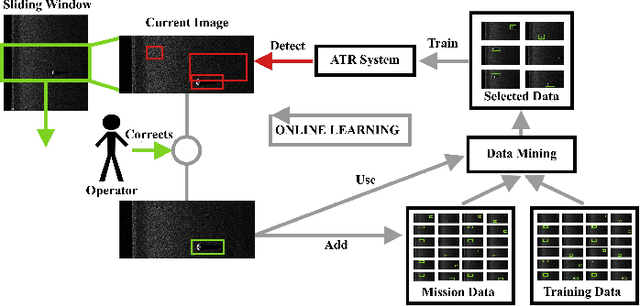
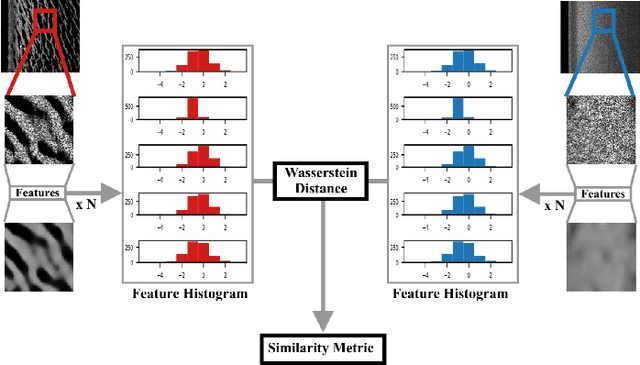
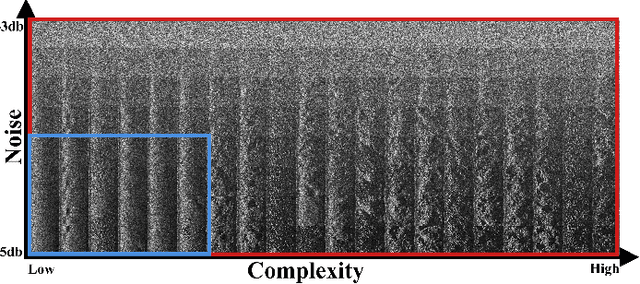

Due to the expensive nature of field data gathering, the lack of training data often limits the performance of Automatic Target Recognition (ATR) systems. This problem is often addressed with domain adaptation techniques, however the currently existing methods fail to satisfy the constraints of resource and time-limited underwater systems. We propose to address this issue via an online fine-tuning of the ATR algorithm using a novel data-selection method. Our proposed data-mining approach relies on visual similarity and outperforms the traditionally employed hard-mining methods. We present a comparative performance analysis in a wide range of simulated environments and highlight the benefits of using our method for the rapid adaptation to previously unseen environments.
* Accepted for publication in IEEE OCEANS2020
Results from the Robocademy ITN: Autonomy, Disturbance Rejection and Perception for Advanced Marine Robotics
Oct 29, 2019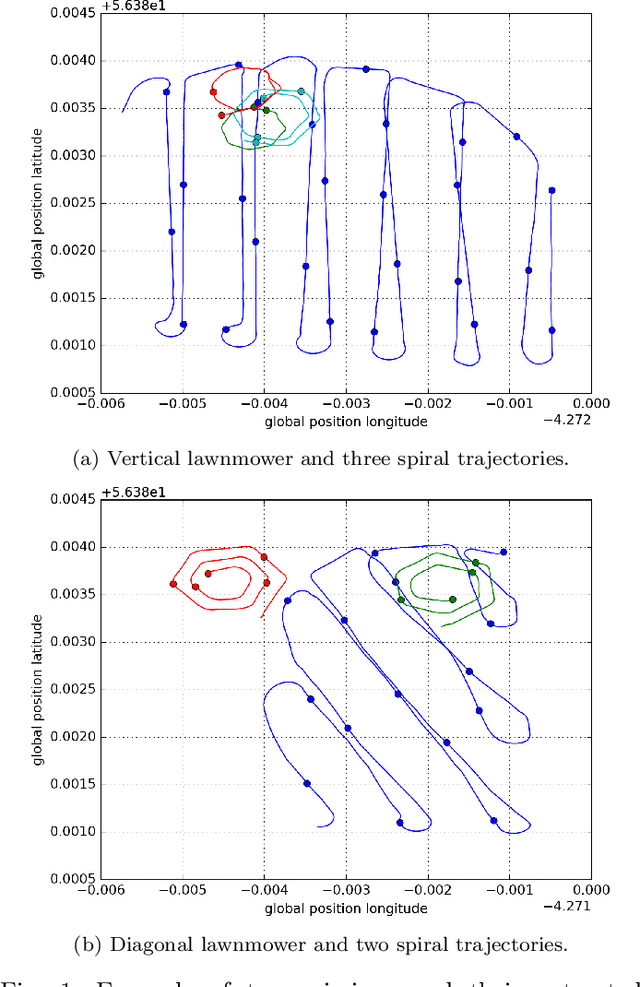

Marine and Underwater resources are important part of the economy of many countries. This requires significant financial resources into their construction and maintentance. Robotics is expected to fill this void, by automating and/or removing humans from hostile environments in order to easily perform maintenance tasks. The Robocademy Marie Sklodowska-Curie Initial Training Network was funded by the European Union's FP7 research program in order to train 13 Fellows into world-leading researchers in Marine and Underwater Robotics. The fellows developed guided research into three areas of key importance: Autonomy, Disturbance Rejection, and Perception. This paper presents a summary of the fellows' research in the three action lines. 71 scientific publications were the primary result of this project, with many other publications currently in the pipeline. Most of the fellows have found employment in Europe, which shows the high demand for this kind of experts. We believe the results from this project are already having an impact in the marine robotics industry, as key technologies are being adopted already.