 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYieldSAT: A Multimodal Benchmark Dataset for High-Resolution Crop Yield Prediction
Apr 01, 2026Crop yield prediction requires substantial data to train scalable models. However, creating yield prediction datasets is constrained by high acquisition costs, heterogeneous data quality, and data privacy regulations. Consequently, existing datasets are scarce, low in quality, or limited to regional levels or single crop types, hindering the development of scalable data-driven solutions. In this work, we release YieldSAT, a large, high-quality, and multimodal dataset for high-resolution crop yield prediction. YieldSAT spans various climate zones across multiple countries, including Argentina, Brazil, Uruguay, and Germany, and includes major crop types, including corn, rapeseed, soybeans, and wheat, across 2,173 expert-curated fields. In total, over 12.2 million yield samples are available, each with a spatial resolution of 10 m. Each field is paired with multispectral satellite imagery, resulting in 113,555 labeled satellite images, complemented by auxiliary environmental data. We demonstrate the potential of large-scale and high-resolution crop yield prediction as a pixel regression task by comparing various deep learning models and data fusion architectures. Furthermore, we highlight open challenges arising from severe distribution shifts in the ground truth data under real-world conditions. To mitigate this, we explore a domain-informed Deep Ensemble approach that exhibits significant performance gains. The dataset is available at https://yieldsat.github.io/.
Uncertainty Quantification for Motor Imagery BCI -- Machine Learning vs. Deep Learning
Jul 10, 2025Brain-computer interfaces (BCIs) turn brain signals into functionally useful output, but they are not always accurate. A good Machine Learning classifier should be able to indicate how confident it is about a given classification, by giving a probability for its classification. Standard classifiers for Motor Imagery BCIs do give such probabilities, but research on uncertainty quantification has been limited to Deep Learning. We compare the uncertainty quantification ability of established BCI classifiers using Common Spatial Patterns (CSP-LDA) and Riemannian Geometry (MDRM) to specialized methods in Deep Learning (Deep Ensembles and Direct Uncertainty Quantification) as well as standard Convolutional Neural Networks (CNNs). We found that the overconfidence typically seen in Deep Learning is not a problem in CSP-LDA and MDRM. We found that MDRM is underconfident, which we solved by adding Temperature Scaling (MDRM-T). CSP-LDA and MDRM-T give the best uncertainty estimates, but Deep Ensembles and standard CNNs give the best classifications. We show that all models are able to separate between easy and difficult estimates, so that we can increase the accuracy of a Motor Imagery BCI by rejecting samples that are ambiguous.
Modeling of AUV Dynamics with Limited Resources: Efficient Online Learning Using Uncertainty
Apr 06, 2025Machine learning proves effective in constructing dynamics models from data, especially for underwater vehicles. Continuous refinement of these models using incoming data streams, however, often requires storage of an overwhelming amount of redundant data. This work investigates the use of uncertainty in the selection of data points to rehearse in online learning when storage capacity is constrained. The models are learned using an ensemble of multilayer perceptrons as they perform well at predicting epistemic uncertainty. We present three novel approaches: the Threshold method, which excludes samples with uncertainty below a specified threshold, the Greedy method, designed to maximize uncertainty among the stored points, and Threshold-Greedy, which combines the previous two approaches. The methods are assessed on data collected by an underwater vehicle Dagon. Comparison with baselines reveals that the Threshold exhibits enhanced stability throughout the learning process and also yields a model with the least cumulative testing loss. We also conducted detailed analyses on the impact of model parameters and storage size on the performance of the models, as well as a comparison of three different uncertainty estimation methods.
Know What You do Not Know: Verbalized Uncertainty Estimation Robustness on Corrupted Images in Vision-Language Models
Apr 04, 2025To leverage the full potential of Large Language Models (LLMs) it is crucial to have some information on their answers' uncertainty. This means that the model has to be able to quantify how certain it is in the correctness of a given response. Bad uncertainty estimates can lead to overconfident wrong answers undermining trust in these models. Quite a lot of research has been done on language models that work with text inputs and provide text outputs. Still, since the visual capabilities have been added to these models recently, there has not been much progress on the uncertainty of Visual Language Models (VLMs). We tested three state-of-the-art VLMs on corrupted image data. We found that the severity of the corruption negatively impacted the models' ability to estimate their uncertainty and the models also showed overconfidence in most of the experiments.
The Marine Debris Forward-Looking Sonar Datasets
Mar 28, 2025Sonar sensing is fundamental for underwater robotics, but limited by capabilities of AI systems, which need large training datasets. Public data in sonar modalities is lacking. This paper presents the Marine Debris Forward-Looking Sonar datasets, with three different settings (watertank, turntable, flooded quarry) increasing dataset diversity and multiple computer vision tasks: object classification, object detection, semantic segmentation, patch matching, and unsupervised learning. We provide full dataset description, basic analysis and initial results for some tasks. We expect the research community will benefit from this dataset, which is publicly available at https://doi.org/10.5281/zenodo.15101686
Can Bayesian Neural Networks Explicitly Model Input Uncertainty?
Jan 14, 2025Inputs to machine learning models can have associated noise or uncertainties, but they are often ignored and not modelled. It is unknown if Bayesian Neural Networks and their approximations are able to consider uncertainty in their inputs. In this paper we build a two input Bayesian Neural Network (mean and standard deviation) and evaluate its capabilities for input uncertainty estimation across different methods like Ensembles, MC-Dropout, and Flipout. Our results indicate that only some uncertainty estimation methods for approximate Bayesian NNs can model input uncertainty, in particular Ensembles and Flipout.
Uncertainty Estimation for Super-Resolution using ESRGAN
Dec 19, 2024



Deep Learning-based image super-resolution (SR) has been gaining traction with the aid of Generative Adversarial Networks. Models like SRGAN and ESRGAN are constantly ranked between the best image SR tools. However, they lack principled ways for estimating predictive uncertainty. In the present work, we enhance these models using Monte Carlo-Dropout and Deep Ensemble, allowing the computation of predictive uncertainty. When coupled with a prediction, uncertainty estimates can provide more information to the model users, highlighting pixels where the SR output might be uncertain, hence potentially inaccurate, if these estimates were to be reliable. Our findings suggest that these uncertainty estimates are decently calibrated and can hence fulfill this goal, while providing no performance drop with respect to the corresponding models without uncertainty estimation.
Forecasting Smog Clouds With Deep Learning
Oct 03, 2024



In this proof-of-concept study, we conduct multivariate timeseries forecasting for the concentrations of nitrogen dioxide (NO2), ozone (O3), and (fine) particulate matter (PM10 & PM2.5) with meteorological covariates between two locations using various deep learning models, with a focus on long short-term memory (LSTM) and gated recurrent unit (GRU) architectures. In particular, we propose an integrated, hierarchical model architecture inspired by air pollution dynamics and atmospheric science that employs multi-task learning and is benchmarked by unidirectional and fully-connected models. Results demonstrate that, above all, the hierarchical GRU proves itself as a competitive and efficient method for forecasting the concentration of smog-related pollutants.
How disentangled are your classification uncertainties?
Aug 22, 2024Uncertainty Quantification in Machine Learning has progressed to predicting the source of uncertainty in a prediction: Uncertainty from stochasticity in the data (aleatoric), or uncertainty from limitations of the model (epistemic). Generally, each uncertainty is evaluated in isolation, but this obscures the fact that they are often not truly disentangled. This work proposes a set of experiments to evaluate disentanglement of aleatoric and epistemic uncertainty, and uses these methods to compare two competing formulations for disentanglement (the Information Theoretic approach, and the Gaussian Logits approach). The results suggest that the Information Theoretic approach gives better disentanglement, but that either predicted source of uncertainty is still largely contaminated by the other for both methods. We conclude that with the current methods for disentangling, aleatoric and epistemic uncertainty are not reliably separated, and we provide a clear set of experimental criteria that good uncertainty disentanglement should follow.
The Dilemma of Uncertainty Estimation for General Purpose AI in the EU AI Act
Aug 20, 2024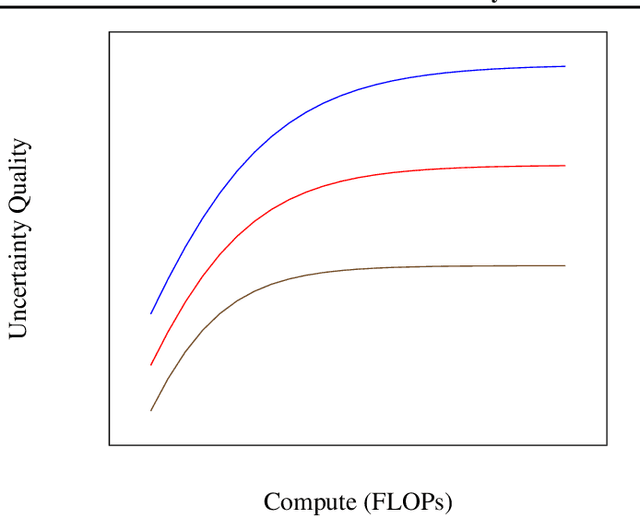
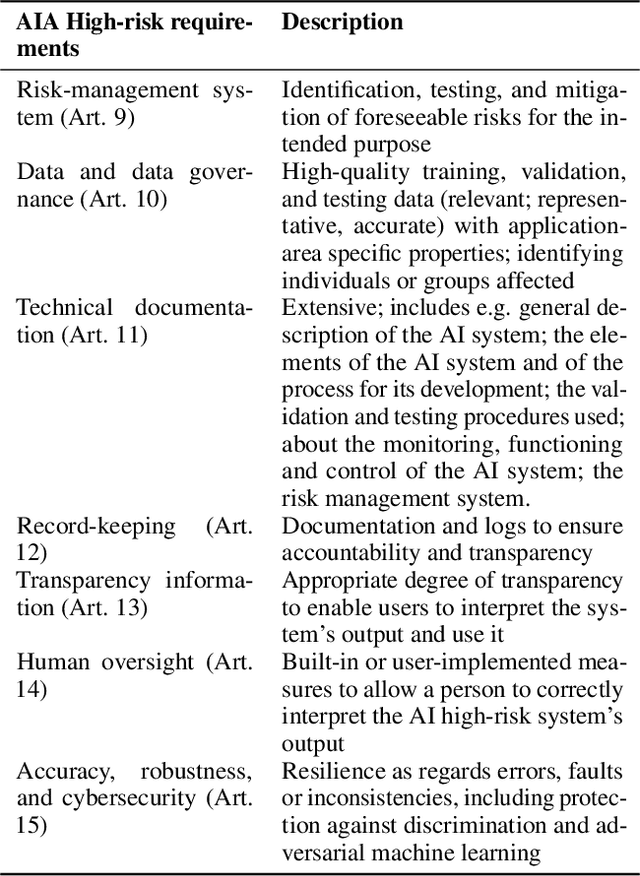
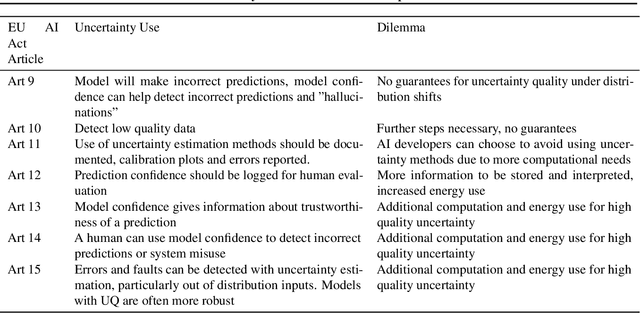
The AI act is the European Union-wide regulation of AI systems. It includes specific provisions for general-purpose AI models which however need to be further interpreted in terms of technical standards and state-of-art studies to ensure practical compliance solutions. This paper examines the AI act requirements for providers and deployers of general-purpose AI and further proposes uncertainty estimation as a suitable measure for legal compliance and quality assurance in training of such models. We argue that uncertainty estimation should be a required component for deploying models in the real world, and under the EU AI Act, it could fulfill several requirements for transparency, accuracy, and trustworthiness. However, generally using uncertainty estimation methods increases the amount of computation, producing a dilemma, as computation might go over the threshold ($10^{25}$ FLOPS) to classify the model as a systemic risk system which bears more regulatory burden.