 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparsity-Driven Plasticity in Multi-Task Reinforcement Learning
Aug 09, 2025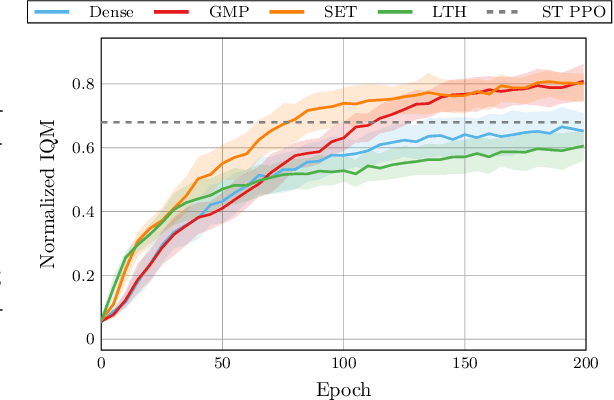
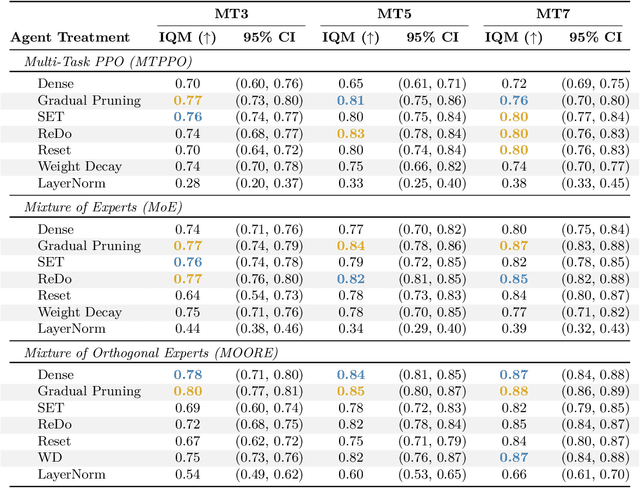

Plasticity loss, a diminishing capacity to adapt as training progresses, is a critical challenge in deep reinforcement learning. We examine this issue in multi-task reinforcement learning (MTRL), where higher representational flexibility is crucial for managing diverse and potentially conflicting task demands. We systematically explore how sparsification methods, particularly Gradual Magnitude Pruning (GMP) and Sparse Evolutionary Training (SET), enhance plasticity and consequently improve performance in MTRL agents. We evaluate these approaches across distinct MTRL architectures (shared backbone, Mixture of Experts, Mixture of Orthogonal Experts) on standardized MTRL benchmarks, comparing against dense baselines, and a comprehensive range of alternative plasticity-inducing or regularization methods. Our results demonstrate that both GMP and SET effectively mitigate key indicators of plasticity degradation, such as neuron dormancy and representational collapse. These plasticity improvements often correlate with enhanced multi-task performance, with sparse agents frequently outperforming dense counterparts and achieving competitive results against explicit plasticity interventions. Our findings offer insights into the interplay between plasticity, network sparsity, and MTRL designs, highlighting dynamic sparsification as a robust but context-sensitive tool for developing more adaptable MTRL systems.
Upside-Down Reinforcement Learning for More Interpretable Optimal Control
Nov 18, 2024



Model-Free Reinforcement Learning (RL) algorithms either learn how to map states to expected rewards or search for policies that can maximize a certain performance function. Model-Based algorithms instead, aim to learn an approximation of the underlying model of the RL environment and then use it in combination with planning algorithms. Upside-Down Reinforcement Learning (UDRL) is a novel learning paradigm that aims to learn how to predict actions from states and desired commands. This task is formulated as a Supervised Learning problem and has successfully been tackled by Neural Networks (NNs). In this paper, we investigate whether function approximation algorithms other than NNs can also be used within a UDRL framework. Our experiments, performed over several popular optimal control benchmarks, show that tree-based methods like Random Forests and Extremely Randomized Trees can perform just as well as NNs with the significant benefit of resulting in policies that are inherently more interpretable than NNs, therefore paving the way for more transparent, safe, and robust RL.
Forecasting Smog Clouds With Deep Learning
Oct 03, 2024



In this proof-of-concept study, we conduct multivariate timeseries forecasting for the concentrations of nitrogen dioxide (NO2), ozone (O3), and (fine) particulate matter (PM10 & PM2.5) with meteorological covariates between two locations using various deep learning models, with a focus on long short-term memory (LSTM) and gated recurrent unit (GRU) architectures. In particular, we propose an integrated, hierarchical model architecture inspired by air pollution dynamics and atmospheric science that employs multi-task learning and is benchmarked by unidirectional and fully-connected models. Results demonstrate that, above all, the hierarchical GRU proves itself as a competitive and efficient method for forecasting the concentration of smog-related pollutants.