 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling of AUV Dynamics with Limited Resources: Efficient Online Learning Using Uncertainty
Apr 06, 2025Machine learning proves effective in constructing dynamics models from data, especially for underwater vehicles. Continuous refinement of these models using incoming data streams, however, often requires storage of an overwhelming amount of redundant data. This work investigates the use of uncertainty in the selection of data points to rehearse in online learning when storage capacity is constrained. The models are learned using an ensemble of multilayer perceptrons as they perform well at predicting epistemic uncertainty. We present three novel approaches: the Threshold method, which excludes samples with uncertainty below a specified threshold, the Greedy method, designed to maximize uncertainty among the stored points, and Threshold-Greedy, which combines the previous two approaches. The methods are assessed on data collected by an underwater vehicle Dagon. Comparison with baselines reveals that the Threshold exhibits enhanced stability throughout the learning process and also yields a model with the least cumulative testing loss. We also conducted detailed analyses on the impact of model parameters and storage size on the performance of the models, as well as a comparison of three different uncertainty estimation methods.
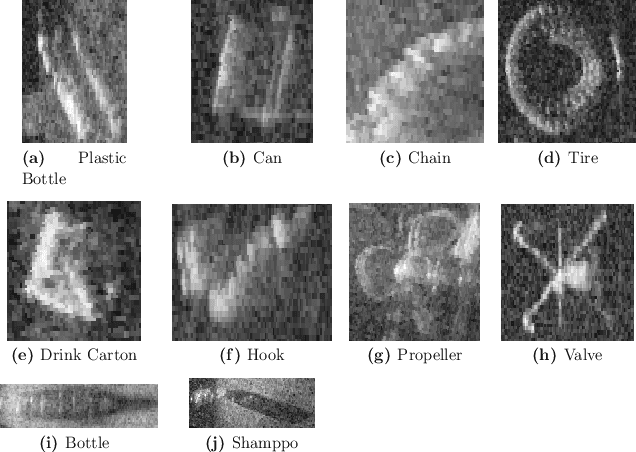
The Marine Debris Forward-Looking Sonar Datasets
Mar 28, 2025Sonar sensing is fundamental for underwater robotics, but limited by capabilities of AI systems, which need large training datasets. Public data in sonar modalities is lacking. This paper presents the Marine Debris Forward-Looking Sonar datasets, with three different settings (watertank, turntable, flooded quarry) increasing dataset diversity and multiple computer vision tasks: object classification, object detection, semantic segmentation, patch matching, and unsupervised learning. We provide full dataset description, basic analysis and initial results for some tasks. We expect the research community will benefit from this dataset, which is publicly available at https://doi.org/10.5281/zenodo.15101686
NeRF-To-Real Tester: Neural Radiance Fields as Test Image Generators for Vision of Autonomous Systems
Dec 20, 2024Autonomous inspection of infrastructure on land and in water is a quickly growing market, with applications including surveying constructions, monitoring plants, and tracking environmental changes in on- and off-shore wind energy farms. For Autonomous Underwater Vehicles and Unmanned Aerial Vehicles overfitting of controllers to simulation conditions fundamentally leads to poor performance in the operation environment. There is a pressing need for more diverse and realistic test data that accurately represents the challenges faced by these systems. We address the challenge of generating perception test data for autonomous systems by leveraging Neural Radiance Fields to generate realistic and diverse test images, and integrating them into a metamorphic testing framework for vision components such as vSLAM and object detection. Our tool, N2R-Tester, allows training models of custom scenes and rendering test images from perturbed positions. An experimental evaluation of N2R-Tester on eight different vision components in AUVs and UAVs demonstrates the efficacy and versatility of the approach.
AUV trajectory optimization with hydrodynamic forces for Icy Moon Exploration
Jun 14, 2024
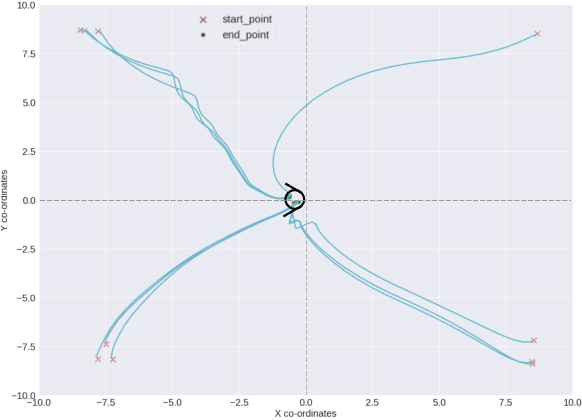
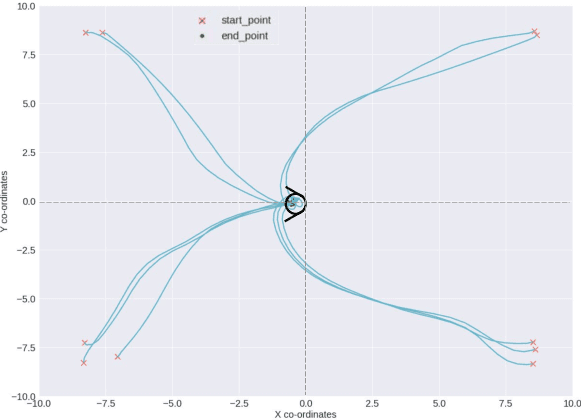
To explore oceans on ice-covered moons in the solar system, energy-efficient Autonomous Underwater Vehicles (AUVs) with long ranges must cover enough distance to record and collect enough data. These usually underactuated vehicles are hard to control when performing tasks such as vertical docking or the inspection of vertical walls. This paper introduces a control strategy for DeepLeng to navigate in the ice-covered ocean of Jupiter's moon Europa and presents simulation results preceding a discussion on what is further needed for robust control during the mission.
* 7 pages, 8 figures
Spatial Acoustic Projection for 3D Imaging Sonar Reconstruction
Jun 06, 2022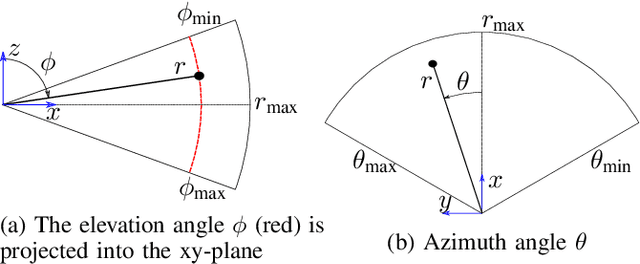

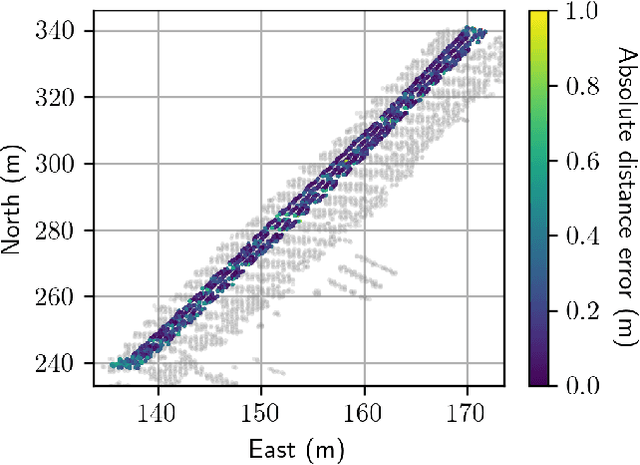
In this work we present a novel method for reconstructing 3D surfaces using a multi-beam imaging sonar. We integrate the intensities measured by the sonar from different viewpoints for fixed cell positions in a 3D grid. For each cell we integrate a feature vector that holds the mean intensity for a discretized range of viewpoints. Based on the feature vectors and independent sparse range measurements that act as ground truth information, we train convolutional neural networks that allow us to predict the signed distance and direction to the nearest surface for each cell. The predicted signed distances can be projected into a truncated signed distance field (TSDF) along the predicted directions. Utilizing the marching cubes algorithm, a polygon mesh can be rendered from the TSDF. Our method allows a dense 3D reconstruction from a limited set of viewpoints and was evaluated on three real-world datasets.
* Preprint
Self-supervised Learning for Sonar Image Classification
Apr 20, 2022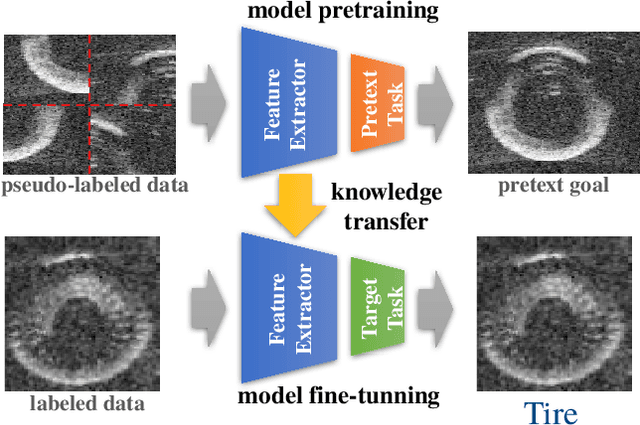
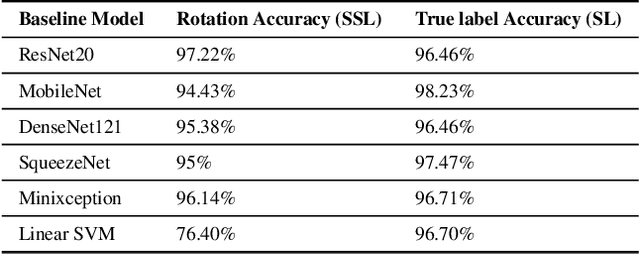
Self-supervised learning has proved to be a powerful approach to learn image representations without the need of large labeled datasets. For underwater robotics, it is of great interest to design computer vision algorithms to improve perception capabilities such as sonar image classification. Due to the confidential nature of sonar imaging and the difficulty to interpret sonar images, it is challenging to create public large labeled sonar datasets to train supervised learning algorithms. In this work, we investigate the potential of three self-supervised learning methods (RotNet, Denoising Autoencoders, and Jigsaw) to learn high-quality sonar image representation without the need of human labels. We present pre-training and transfer learning results on real-life sonar image datasets. Our results indicate that self-supervised pre-training yields classification performance comparable to supervised pre-training in a few-shot transfer learning setup across all three methods. Code and self-supervised pre-trained models are be available at https://github.com/agrija9/ssl-sonar-images
Deep Reinforcement Learning for Continuous Docking Control of Autonomous Underwater Vehicles: A Benchmarking Study
Aug 05, 2021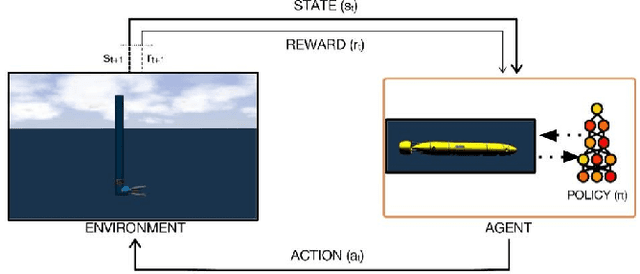
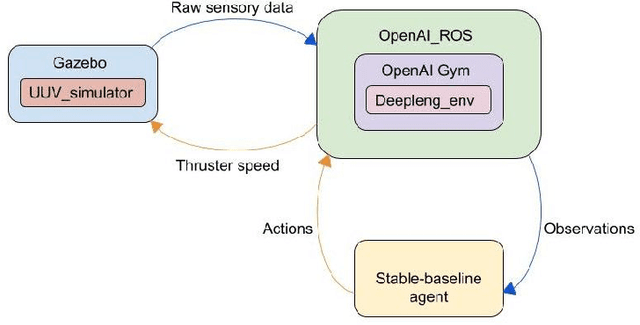
Docking control of an autonomous underwater vehicle (AUV) is a task that is integral to achieving persistent long term autonomy. This work explores the application of state-of-the-art model-free deep reinforcement learning (DRL) approaches to the task of AUV docking in the continuous domain. We provide a detailed formulation of the reward function, utilized to successfully dock the AUV onto a fixed docking platform. A major contribution that distinguishes our work from the previous approaches is the usage of a physics simulator to define and simulate the underwater environment as well as the DeepLeng AUV. We propose a new reward function formulation for the docking task, incorporating several components, that outperforms previous reward formulations. We evaluate proximal policy optimization (PPO), twin delayed deep deterministic policy gradients (TD3) and soft actor-critic (SAC) in combination with our reward function. Our evaluation yielded results that conclusively show the TD3 agent to be most efficient and consistent in terms of docking the AUV, over multiple evaluation runs it achieved a 100% success rate and episode return of 10667.1 +- 688.8. We also show how our reward function formulation improves over the state of the art.
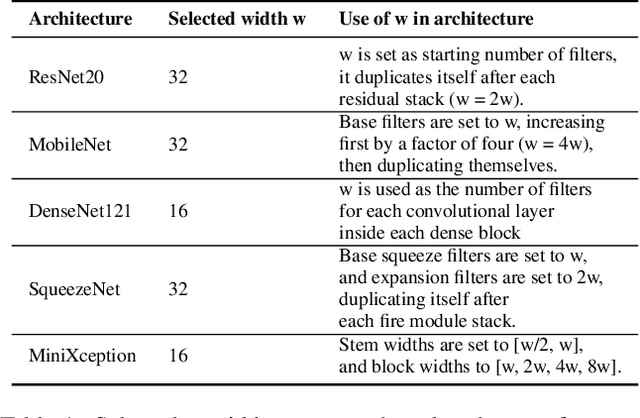
Pre-trained Models for Sonar Images
Aug 02, 2021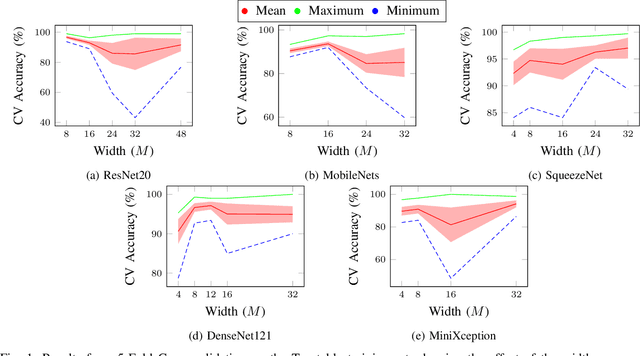
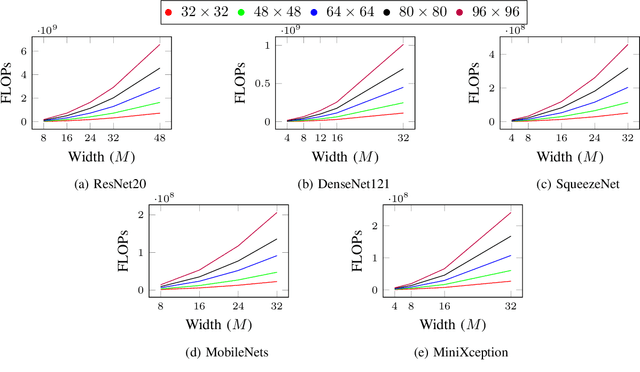
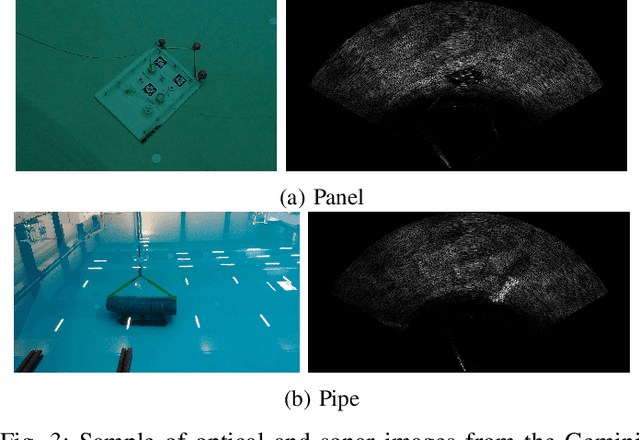
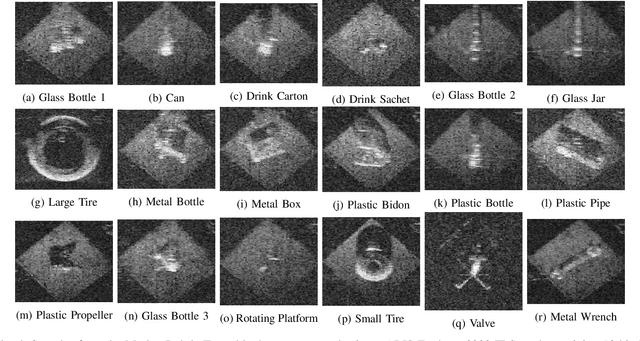
Machine learning and neural networks are now ubiquitous in sonar perception, but it lags behind the computer vision field due to the lack of data and pre-trained models specifically for sonar images. In this paper we present the Marine Debris Turntable dataset and produce pre-trained neural networks trained on this dataset, meant to fill the gap of missing pre-trained models for sonar images. We train Resnet 20, MobileNets, DenseNet121, SqueezeNet, MiniXception, and an Autoencoder, over several input image sizes, from 32 x 32 to 96 x 96, on the Marine Debris turntable dataset. We evaluate these models using transfer learning for low-shot classification in the Marine Debris Watertank and another dataset captured using a Gemini 720i sonar. Our results show that in both datasets the pre-trained models produce good features that allow good classification accuracy with low samples (10-30 samples per class). The Gemini dataset validates that the features transfer to other kinds of sonar sensors. We expect that the community benefits from the public release of our pre-trained models and the turntable dataset.
A First Step Towards Distribution Invariant Regression Metrics
Sep 10, 2020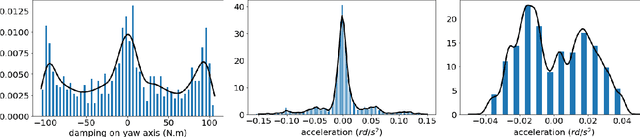
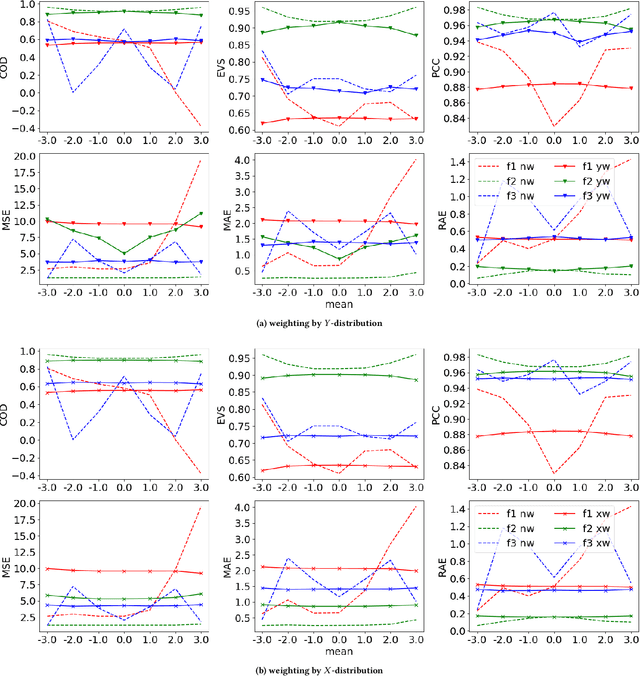
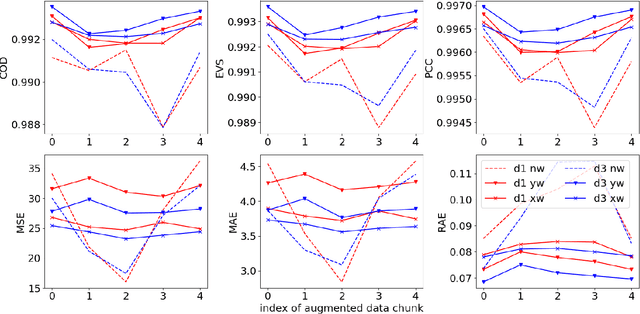
Regression evaluation has been performed for decades. Some metrics have been identified to be robust against shifting and scaling of the data but considering the different distributions of data is much more difficult to address (imbalance problem) even though it largely impacts the comparability between evaluations on different datasets. In classification, it has been stated repeatedly that performance metrics like the F-Measure and Accuracy are highly dependent on the class distribution and that comparisons between different datasets with different distributions are impossible. We show that the same problem exists in regression. The distribution of odometry parameters in robotic applications can for example largely vary between different recording sessions. Here, we need regression algorithms that either perform equally well for all function values, or that focus on certain boundary regions like high speed. This has to be reflected in the evaluation metric. We propose the modification of established regression metrics by weighting with the inverse distribution of function values $Y$ or the samples $X$ using an automatically tuned Gaussian kernel density estimator. We show on synthetic and robotic data in reproducible experiments that classical metrics behave wrongly, whereas our new metrics are less sensitive to changing distributions, especially when correcting by the marginal distribution in $X$. Our new evaluation concept enables the comparison of results between different datasets with different distributions. Furthermore, it can reveal overfitting of a regression algorithm to overrepresented target values. As an outcome, non-overfitting regression algorithms will be more likely chosen due to our corrected metrics.
Results from the Robocademy ITN: Autonomy, Disturbance Rejection and Perception for Advanced Marine Robotics
Oct 29, 2019

Marine and Underwater resources are important part of the economy of many countries. This requires significant financial resources into their construction and maintentance. Robotics is expected to fill this void, by automating and/or removing humans from hostile environments in order to easily perform maintenance tasks. The Robocademy Marie Sklodowska-Curie Initial Training Network was funded by the European Union's FP7 research program in order to train 13 Fellows into world-leading researchers in Marine and Underwater Robotics. The fellows developed guided research into three areas of key importance: Autonomy, Disturbance Rejection, and Perception. This paper presents a summary of the fellows' research in the three action lines. 71 scientific publications were the primary result of this project, with many other publications currently in the pipeline. Most of the fellows have found employment in Europe, which shows the high demand for this kind of experts. We believe the results from this project are already having an impact in the marine robotics industry, as key technologies are being adopted already.