 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Force/Position Tracking Control via Control Barrier Functions for Floating Base Mobile Manipulator Systems
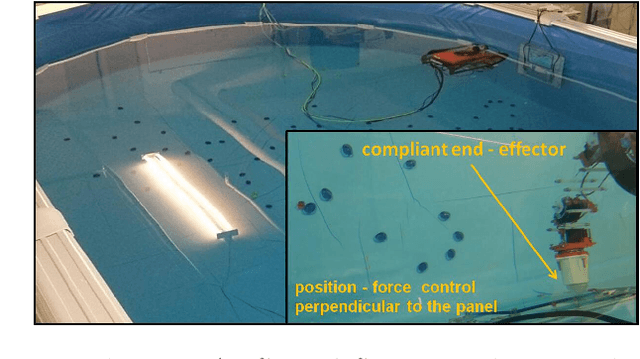
Apr 21, 2024This paper introduces a safe force/position tracking control strategy designed for Free-Floating Mobile Manipulator Systems (MMSs) engaging in compliant contact with planar surfaces. The strategy uniquely integrates the Control Barrier Function (CBF) to manage operational limitations and safety concerns. It effectively addresses safety-critical aspects in the kinematic as well as dynamic level, such as manipulator joint limits, system velocity constraints, and inherent system dynamic uncertainties. The proposed strategy remains robust to the uncertainties of the MMS dynamic model, external disturbances, or variations in the contact stiffness model. The proposed control method has low computational demand ensures easy implementation on onboard computing systems, endorsing real-time operations. Simulation results verify the strategy's efficacy, reflecting enhanced system performance and safety.
Towards Data-driven LQR with KoopmanizingFlows
Jan 27, 2022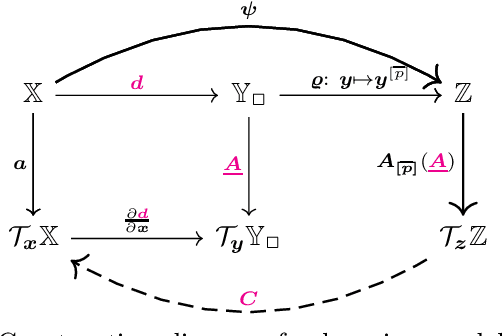
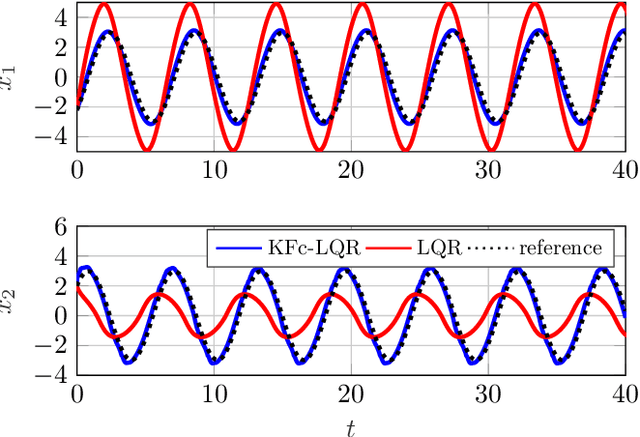
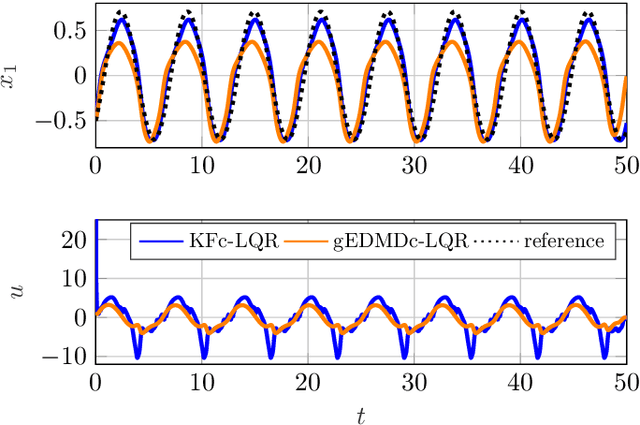
We propose a novel framework for learning linear time-invariant (LTI) models for a class of continuous-time non-autonomous nonlinear dynamics based on a representation of Koopman operators. In general, the operator is infinite-dimensional but, crucially, linear. To utilize it for efficient LTI control, we learn a finite representation of the Koopman operator that is linear in controls while concurrently learning meaningful lifting coordinates. For the latter, we rely on KoopmanizingFlows - a diffeomorphism-based representation of Koopman operators. With such a learned model, we can replace the nonlinear infinite-horizon optimal control problem with quadratic costs to that of a linear quadratic regulator (LQR), facilitating efficacious optimal control for nonlinear systems. The prediction and control efficacy of the proposed method is verified on simulation examples.
Results from the Robocademy ITN: Autonomy, Disturbance Rejection and Perception for Advanced Marine Robotics
Oct 29, 2019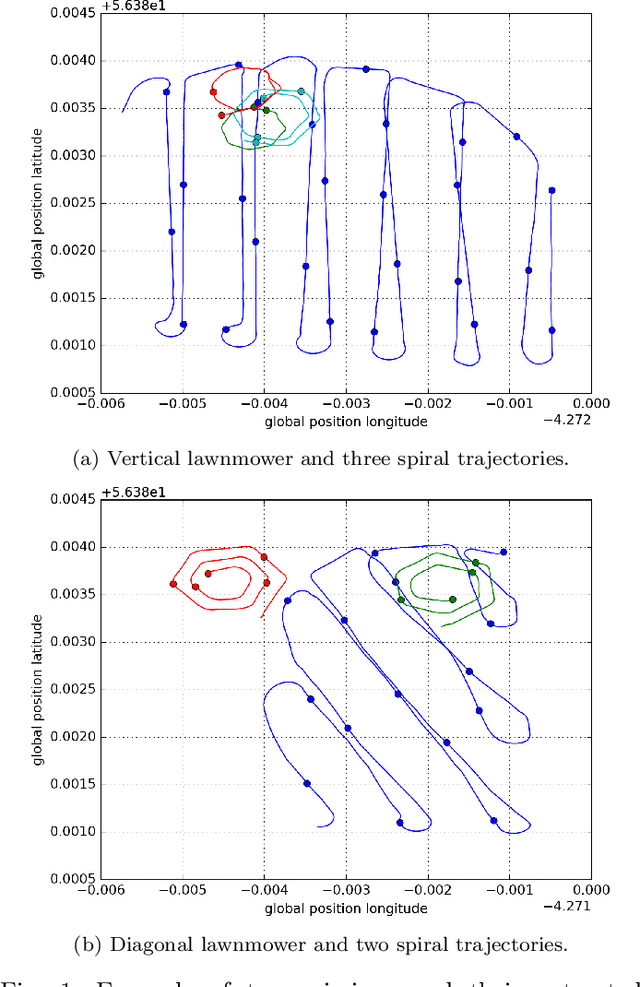

Marine and Underwater resources are important part of the economy of many countries. This requires significant financial resources into their construction and maintentance. Robotics is expected to fill this void, by automating and/or removing humans from hostile environments in order to easily perform maintenance tasks. The Robocademy Marie Sklodowska-Curie Initial Training Network was funded by the European Union's FP7 research program in order to train 13 Fellows into world-leading researchers in Marine and Underwater Robotics. The fellows developed guided research into three areas of key importance: Autonomy, Disturbance Rejection, and Perception. This paper presents a summary of the fellows' research in the three action lines. 71 scientific publications were the primary result of this project, with many other publications currently in the pipeline. Most of the fellows have found employment in Europe, which shows the high demand for this kind of experts. We believe the results from this project are already having an impact in the marine robotics industry, as key technologies are being adopted already.
A Distributed Predictive Control Approach for Cooperative Manipulation of Multiple Underwater Vehicle Manipulator Systems
Jun 23, 2019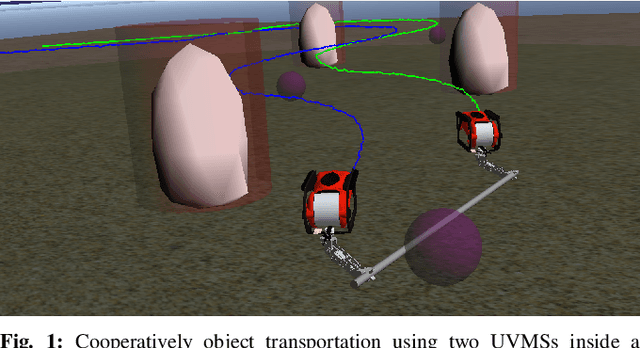
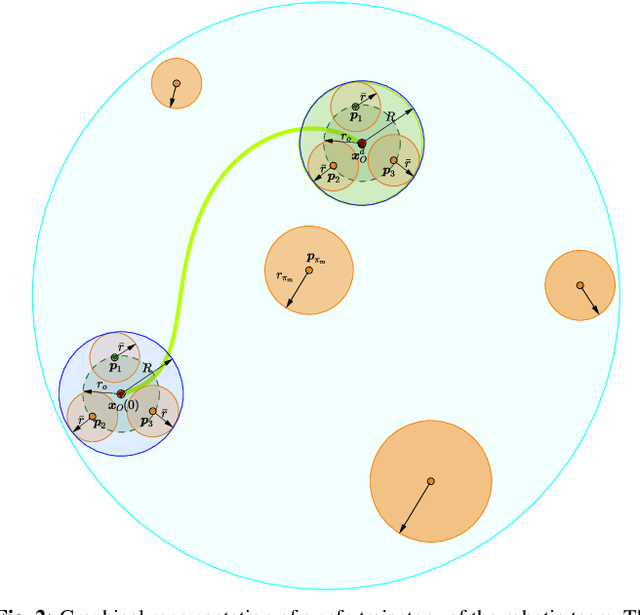
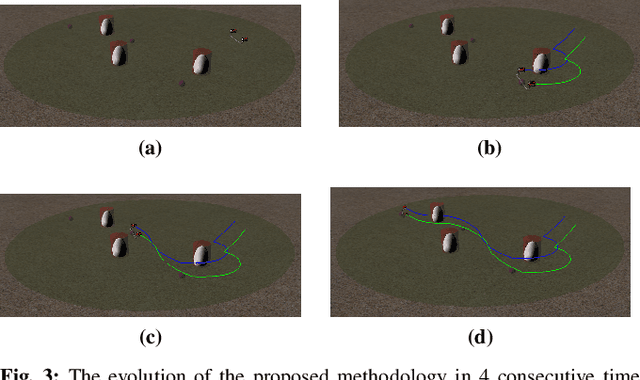
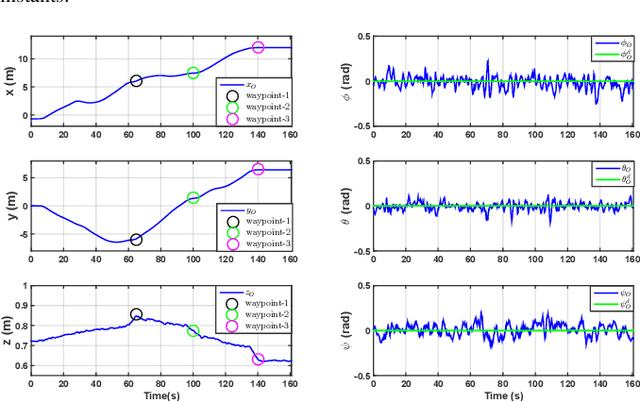
This paper addresses the problem of cooperative object transportation for multiple Underwater Vehicle Manipulator Systems (UVMSs) in a constrained workspace involving static obstacles. We propose a Nonlinear Model Predictive Control (NMPC) approach for a team of UVMSs in order to transport an object while avoiding significant constraints and limitations such as: kinematic and representation singularities, obstacles within the workspace, joint limits and control input saturations. More precisely, by exploiting the coupled dynamics between the robots and the object, and using certain load sharing coefficients, we design a distributed NMPC for each UVMS in order to cooperatively transport the object within the workspace's feasible region. Moreover, the control scheme adopts load sharing among the UVMSs according to their specific payload capabilities. Additionally, the feedback relies on each UVMS's locally measurements and no explicit data is exchanged online among the robots, thus reducing the required communication bandwidth. Finally, real-time simulation results conducted in UwSim dynamic simulator running in ROS environment verify the efficiency of the theoretical finding.