 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Force/Position Tracking Control via Control Barrier Functions for Floating Base Mobile Manipulator Systems
Apr 21, 2024This paper introduces a safe force/position tracking control strategy designed for Free-Floating Mobile Manipulator Systems (MMSs) engaging in compliant contact with planar surfaces. The strategy uniquely integrates the Control Barrier Function (CBF) to manage operational limitations and safety concerns. It effectively addresses safety-critical aspects in the kinematic as well as dynamic level, such as manipulator joint limits, system velocity constraints, and inherent system dynamic uncertainties. The proposed strategy remains robust to the uncertainties of the MMS dynamic model, external disturbances, or variations in the contact stiffness model. The proposed control method has low computational demand ensures easy implementation on onboard computing systems, endorsing real-time operations. Simulation results verify the strategy's efficacy, reflecting enhanced system performance and safety.
Enhancing Data-Driven Reachability Analysis using Temporal Logic Side Information
Sep 15, 2021

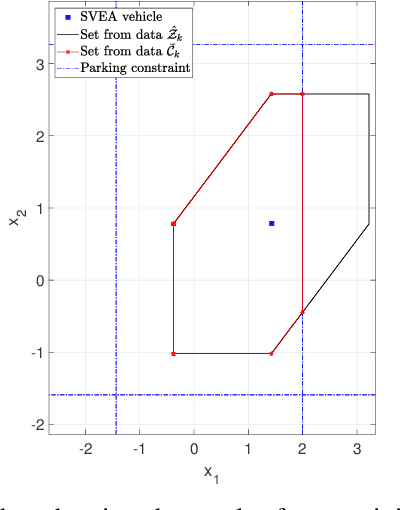
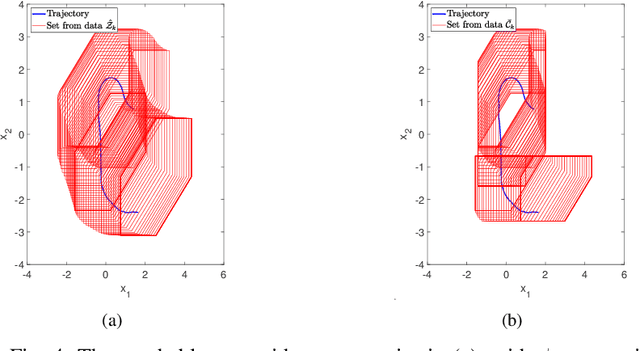
This paper presents algorithms for performing data-driven reachability analysis under temporal logic side information. In certain scenarios, the data-driven reachable sets of a robot can be prohibitively conservative due to the inherent noise in the robot's historical measurement data. In the same scenarios, we often have side information about the robot's expected motion (e.g., limits on how much a robot can move in a one-time step) that could be useful for further specifying the reachability analysis. In this work, we show that if we can model this side information using a signal temporal logic (STL) fragment, we can constrain the data-driven reachability analysis and safely limit the conservatism of the computed reachable sets. Moreover, we provide formal guarantees that, even after incorporating side information, the computed reachable sets still properly over-approximate the robot's future states. Lastly, we empirically validate the practicality of the over-approximation by computing constrained, data-driven reachable sets for the Small-Vehicles-for-Autonomy (SVEA) hardware platform in two driving scenarios.