 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Driven Reachability Analysis via Diffusion Models with PAC Guarantees
Mar 31, 2026We present a data-driven framework for reachability analysis of nonlinear dynamical systems that requires no explicit model. A denoising diffusion probabilistic model learns the time-evolving state distribution of a dynamical system from trajectory data alone. The predicted reachable set takes the form of a sublevel set of a nonconformity score derived from the reconstruction error, with the threshold calibrated via the Learn Then Test procedure so that the probability of excluding a reachable state is bounded with high probability. Experiments on three nonlinear systems, a forced Duffing oscillator, a planar quadrotor, and a high-dimensional reaction-diffusion system, confirm that the empirical miss rate remains below the Probably Approximately Correct (PAC) bound while scaling to state dimensions beyond the reach of classical grid-based and polynomial methods.
GNN-DIP: Neural Corridor Selection for Decomposition-Based Motion Planning
Mar 12, 2026Motion planning through narrow passages remains a core challenge: sampling-based planners rarely place samples inside these narrow but critical regions, and even when samples land inside a passage, the straight-line connections between them run close to obstacle boundaries and are frequently rejected by collision checking. Decomposition-based planners resolve both issues by partitioning free space into convex cells -- every passage is captured exactly as a cell boundary, and any path within a cell is collision-free by construction. However, the number of candidate corridors through the cell graph grows combinatorially with environment complexity, creating a bottleneck in corridor selection. We present GNN-DIP, a framework that addresses this by integrating a Graph Neural Network (GNN) with a two-phase Decomposition-Informed Planner (DIP). The GNN predicts portal scores on the cell adjacency graph to bias corridor search toward near-optimal regions while preserving completeness. In 2D, Constrained Delaunay Triangulation (CDT) with the Funnel algorithm yields exact shortest paths within corridors; in 3D, Slab convex decomposition with portal-face sampling provides near-optimal path evaluation. Benchmarks on 2D narrow-passage scenarios, 3D bottleneck environments with up to 246 obstacles, and dynamic 2D settings show that GNN-DIP achieves 99--100% success rates with 2--280 times speedup over sampling-based baselines.
Data-Driven Safety Verification using Barrier Certificates and Matrix Zonotopes
Apr 01, 2025Ensuring safety in cyber-physical systems (CPSs) is a critical challenge, especially when system models are difficult to obtain or cannot be fully trusted due to uncertainty, modeling errors, or environmental disturbances. Traditional model-based approaches rely on precise system dynamics, which may not be available in real-world scenarios. To address this, we propose a data-driven safety verification framework that leverages matrix zonotopes and barrier certificates to verify system safety directly from noisy data. Instead of trusting a single unreliable model, we construct a set of models that capture all possible system dynamics that align with the observed data, ensuring that the true system model is always contained within this set. This model set is compactly represented using matrix zonotopes, enabling efficient computation and propagation of uncertainty. By integrating this representation into a barrier certificate framework, we establish rigorous safety guarantees without requiring an explicit system model. Numerical experiments demonstrate the effectiveness of our approach in verifying safety for dynamical systems with unknown models, showcasing its potential for real-world CPS applications.
Predictive Traffic Rule Compliance using Reinforcement Learning
Mar 29, 2025



Autonomous vehicle path planning has reached a stage where safety and regulatory compliance are crucial. This paper presents a new approach that integrates a motion planner with a deep reinforcement learning model to predict potential traffic rule violations. In this setup, the predictions of the critic directly affect the cost function of the motion planner, guiding the choices of the trajectory. We incorporate key interstate rules from the German Road Traffic Regulation into a rule book and use a graph-based state representation to handle complex traffic information. Our main innovation is replacing the standard actor network in an actor-critic setup with a motion planning module, which ensures both predictable trajectory generation and prevention of long-term rule violations. Experiments on an open German highway dataset show that the model can predict and prevent traffic rule violations beyond the planning horizon, significantly increasing safety in challenging traffic conditions.
Safe LLM-Controlled Robots with Formal Guarantees via Reachability Analysis
Mar 05, 2025



The deployment of Large Language Models (LLMs) in robotic systems presents unique safety challenges, particularly in unpredictable environments. Although LLMs, leveraging zero-shot learning, enhance human-robot interaction and decision-making capabilities, their inherent probabilistic nature and lack of formal guarantees raise significant concerns for safety-critical applications. Traditional model-based verification approaches often rely on precise system models, which are difficult to obtain for real-world robotic systems and may not be fully trusted due to modeling inaccuracies, unmodeled dynamics, or environmental uncertainties. To address these challenges, this paper introduces a safety assurance framework for LLM-controlled robots based on data-driven reachability analysis, a formal verification technique that ensures all possible system trajectories remain within safe operational limits. Our framework specifically investigates the problem of instructing an LLM to navigate the robot to a specified goal and assesses its ability to generate low-level control actions that successfully guide the robot safely toward that goal. By leveraging historical data to construct reachable sets of states for the robot-LLM system, our approach provides rigorous safety guarantees against unsafe behaviors without relying on explicit analytical models. We validate the framework through experimental case studies in autonomous navigation and task planning, demonstrating its effectiveness in mitigating risks associated with LLM-generated commands. This work advances the integration of formal methods into LLM-based robotics, offering a principled and practical approach to ensuring safety in next-generation autonomous systems.
Shared Situational Awareness with V2X Communication and Set-membership Estimation
Feb 10, 2023



The ability to perceive and comprehend a traffic situation and to predict the intent of vehicles and road-users in the surrounding of the ego-vehicle is known as situational awareness. Situational awareness for a heavy-duty autonomous vehicle is a critical part of the automation platform and is dependent on the ego-vehicle's field-of-view. But when it comes to the urban scenario, the field-of-view of the ego-vehicle is likely to be affected by occlusion and blind spots caused by infrastructure, moving vehicles, and parked vehicles. This paper proposes a framework to improve situational awareness using set-membership estimation and vehicle-to-everything (V2X) communication. This framework provides safety guarantees and can adapt to dynamically changing scenarios, and is integrated into an existing complex autonomous platform. A detailed description of the framework implementation and real-time results are illustrated in this paper.
Safe Reinforcement Learning using Data-Driven Predictive Control
Nov 20, 2022Reinforcement learning (RL) algorithms can achieve state-of-the-art performance in decision-making and continuous control tasks. However, applying RL algorithms on safety-critical systems still needs to be well justified due to the exploration nature of many RL algorithms, especially when the model of the robot and the environment are unknown. To address this challenge, we propose a data-driven safety layer that acts as a filter for unsafe actions. The safety layer uses a data-driven predictive controller to enforce safety guarantees for RL policies during training and after deployment. The RL agent proposes an action that is verified by computing the data-driven reachability analysis. If there is an intersection between the reachable set of the robot using the proposed action, we call the data-driven predictive controller to find the closest safe action to the proposed unsafe action. The safety layer penalizes the RL agent if the proposed action is unsafe and replaces it with the closest safe one. In the simulation, we show that our method outperforms state-of-the-art safe RL methods on the robotics navigation problem for a Turtlebot 3 in Gazebo and a quadrotor in Unreal Engine 4 (UE4).
Safe Reinforcement Learning Using Black-Box Reachability Analysis
Apr 15, 2022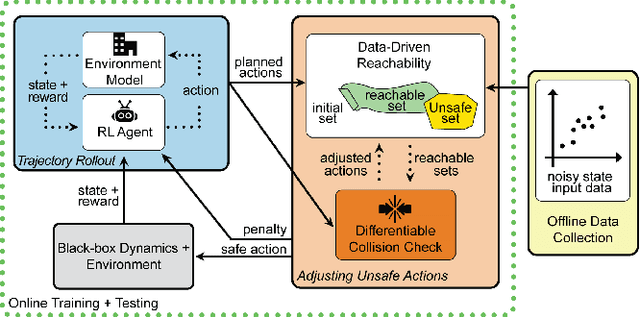
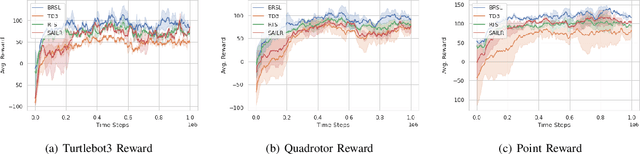

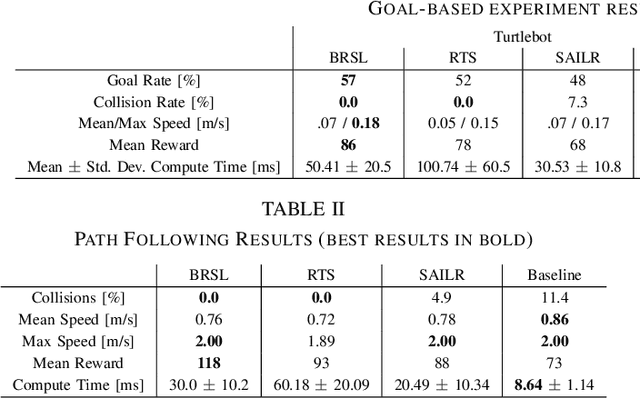
Reinforcement learning (RL) is capable of sophisticated motion planning and control for robots in uncertain environments. However, state-of-the-art deep RL approaches typically lack safety guarantees, especially when the robot and environment models are unknown. To justify widespread deployment, robots must respect safety constraints without sacrificing performance. Thus, we propose a Black-box Reachability-based Safety Layer (BRSL) with three main components: (1) data-driven reachability analysis for a black-box robot model, (2) a trajectory rollout planner that predicts future actions and observations using an ensemble of neural networks trained online, and (3) a differentiable polytope collision check between the reachable set and obstacles that enables correcting unsafe actions. In simulation, BRSL outperforms other state-of-the-art safe RL methods on a Turtlebot 3, a quadrotor, and a trajectory-tracking point mass with an unsafe set adjacent to the area of highest reward.
Data-driven Set-based Estimation of Polynomial Systems with Application to SIR Epidemics
Nov 08, 2021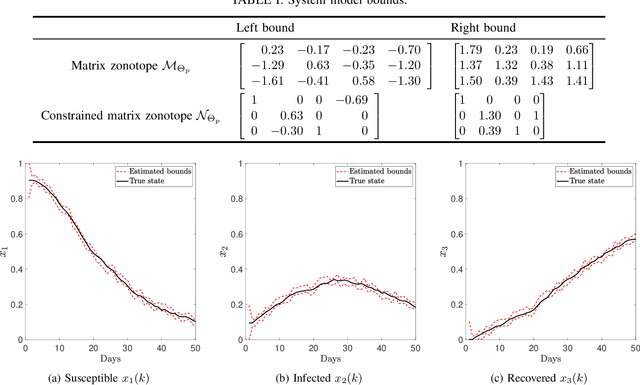
This paper proposes a data-driven set-based estimation algorithm for a class of nonlinear systems with polynomial nonlinearities. Using the system's input-output data, the proposed method computes in real-time a set that guarantees the inclusion of the system's state. Although the system is assumed to be polynomial type, the exact polynomial functions and their coefficients need not be known. To this end, the estimator relies on offline and online phases. The offline phase utilizes past input-output data to estimate a set of possible coefficients of the polynomial system. Then, using this estimated set of coefficients and the side information about the system, the online phase provides a set estimate of the state. Finally, the proposed methodology is evaluated through its application on SIR (Susceptible, Infected, Recovered) epidemic model.
Enhancing Data-Driven Reachability Analysis using Temporal Logic Side Information
Sep 15, 2021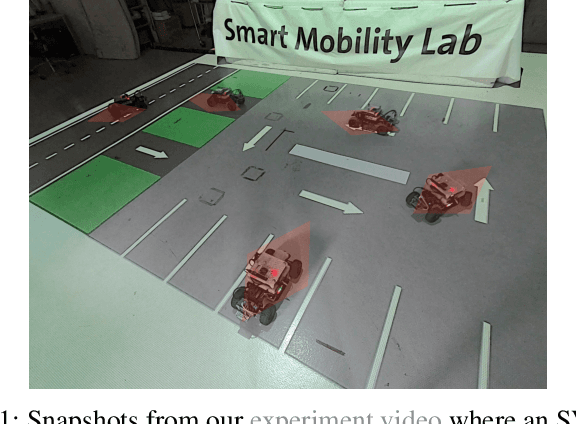

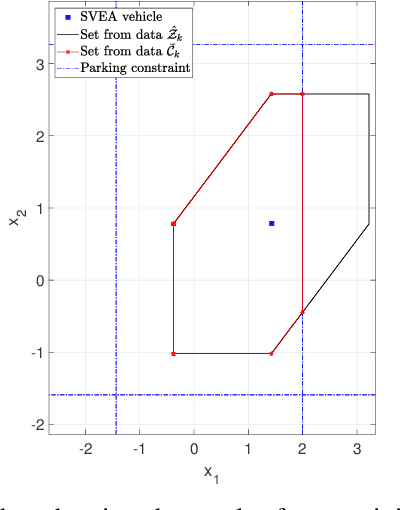
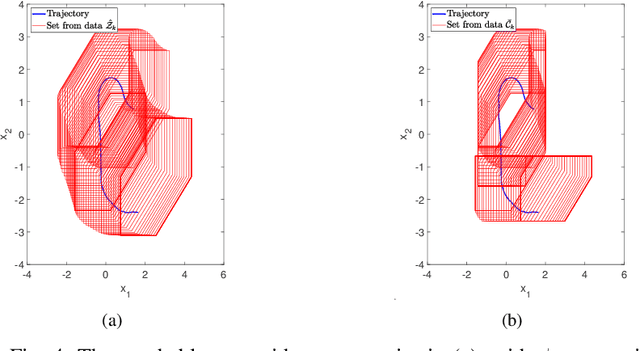
This paper presents algorithms for performing data-driven reachability analysis under temporal logic side information. In certain scenarios, the data-driven reachable sets of a robot can be prohibitively conservative due to the inherent noise in the robot's historical measurement data. In the same scenarios, we often have side information about the robot's expected motion (e.g., limits on how much a robot can move in a one-time step) that could be useful for further specifying the reachability analysis. In this work, we show that if we can model this side information using a signal temporal logic (STL) fragment, we can constrain the data-driven reachability analysis and safely limit the conservatism of the computed reachable sets. Moreover, we provide formal guarantees that, even after incorporating side information, the computed reachable sets still properly over-approximate the robot's future states. Lastly, we empirically validate the practicality of the over-approximation by computing constrained, data-driven reachable sets for the Small-Vehicles-for-Autonomy (SVEA) hardware platform in two driving scenarios.