 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-LSTM based Multi-Agent DRL with Computation-aware Pruning for Agent Twins Migration in Vehicular Embodied AI Networks
May 09, 2025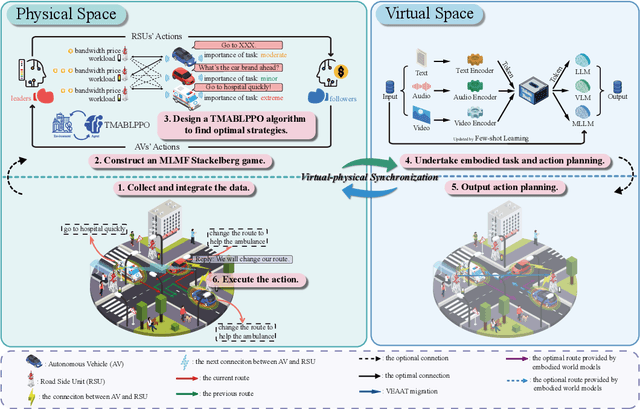
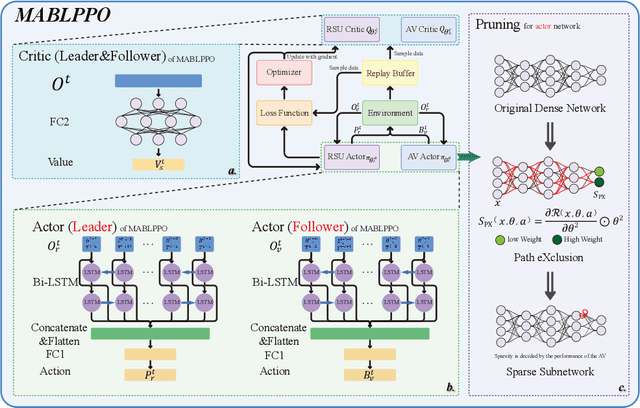
With the advancement of large language models and embodied Artificial Intelligence (AI) in the intelligent transportation scenarios, the combination of them in intelligent transportation spawns the Vehicular Embodied AI Network (VEANs). In VEANs, Autonomous Vehicles (AVs) are typical agents whose local advanced AI applications are defined as vehicular embodied AI agents, enabling capabilities such as environment perception and multi-agent collaboration. Due to computation latency and resource constraints, the local AI applications and services running on vehicular embodied AI agents need to be migrated, and subsequently referred to as vehicular embodied AI agent twins, which drive the advancement of vehicular embodied AI networks to offload intensive tasks to Roadside Units (RSUs), mitigating latency problems while maintaining service quality. Recognizing workload imbalance among RSUs in traditional approaches, we model AV-RSU interactions as a Stackelberg game to optimize bandwidth resource allocation for efficient migration. A Tiny Multi-Agent Bidirectional LSTM Proximal Policy Optimization (TMABLPPO) algorithm is designed to approximate the Stackelberg equilibrium through decentralized coordination. Furthermore, a personalized neural network pruning algorithm based on Path eXclusion (PX) dynamically adapts to heterogeneous AV computation capabilities by identifying task-critical parameters in trained models, reducing model complexity with less performance degradation. Experimental validation confirms the algorithm's effectiveness in balancing system load and minimizing delays, demonstrating significant improvements in vehicular embodied AI agent deployment.
Predictive Traffic Rule Compliance using Reinforcement Learning
Mar 29, 2025



Autonomous vehicle path planning has reached a stage where safety and regulatory compliance are crucial. This paper presents a new approach that integrates a motion planner with a deep reinforcement learning model to predict potential traffic rule violations. In this setup, the predictions of the critic directly affect the cost function of the motion planner, guiding the choices of the trajectory. We incorporate key interstate rules from the German Road Traffic Regulation into a rule book and use a graph-based state representation to handle complex traffic information. Our main innovation is replacing the standard actor network in an actor-critic setup with a motion planning module, which ensures both predictable trajectory generation and prevention of long-term rule violations. Experiments on an open German highway dataset show that the model can predict and prevent traffic rule violations beyond the planning horizon, significantly increasing safety in challenging traffic conditions.