 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResults of the 2024 CommonRoad Motion Planning Competition for Autonomous Vehicles
Dec 22, 2025


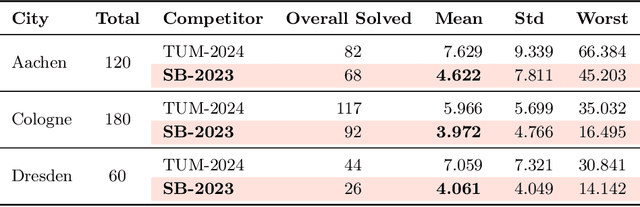
Over the past decade, a wide range of motion planning approaches for autonomous vehicles has been developed to handle increasingly complex traffic scenarios. However, these approaches are rarely compared on standardized benchmarks, limiting the assessment of relative strengths and weaknesses. To address this gap, we present the setup and results of the 4th CommonRoad Motion Planning Competition held in 2024, conducted using the CommonRoad benchmark suite. This annual competition provides an open-source and reproducible framework for benchmarking motion planning algorithms. The benchmark scenarios span highway and urban environments with diverse traffic participants, including passenger cars, buses, and bicycles. Planner performance is evaluated along four dimensions: efficiency, safety, comfort, and compliance with selected traffic rules. This report introduces the competition format and provides a comparison of representative high-performing planners from the 2023 and 2024 editions.
Predictive Traffic Rule Compliance using Reinforcement Learning
Mar 29, 2025



Autonomous vehicle path planning has reached a stage where safety and regulatory compliance are crucial. This paper presents a new approach that integrates a motion planner with a deep reinforcement learning model to predict potential traffic rule violations. In this setup, the predictions of the critic directly affect the cost function of the motion planner, guiding the choices of the trajectory. We incorporate key interstate rules from the German Road Traffic Regulation into a rule book and use a graph-based state representation to handle complex traffic information. Our main innovation is replacing the standard actor network in an actor-critic setup with a motion planning module, which ensures both predictable trajectory generation and prevention of long-term rule violations. Experiments on an open German highway dataset show that the model can predict and prevent traffic rule violations beyond the planning horizon, significantly increasing safety in challenging traffic conditions.
Path Planning based on 2D Object Bounding-box
Feb 22, 2024The implementation of Autonomous Driving (AD) technologies within urban environments presents significant challenges. These challenges necessitate the development of advanced perception systems and motion planning algorithms capable of managing situations of considerable complexity. Although the end-to-end AD method utilizing LiDAR sensors has achieved significant success in this scenario, we argue that its drawbacks may hinder its practical application. Instead, we propose the vision-centric AD as a promising alternative offering a streamlined model without compromising performance. In this study, we present a path planning method that utilizes 2D bounding boxes of objects, developed through imitation learning in urban driving scenarios. This is achieved by integrating high-definition (HD) map data with images captured by surrounding cameras. Subsequent perception tasks involve bounding-box detection and tracking, while the planning phase employs both local embeddings via Graph Neural Network (GNN) and global embeddings via Transformer for temporal-spatial feature aggregation, ultimately producing optimal path planning information. We evaluated our model on the nuPlan planning task and observed that it performs competitively in comparison to existing vision-centric methods.
YOLO-BEV: Generating Bird's-Eye View in the Same Way as 2D Object Detection
Oct 26, 2023



Vehicle perception systems strive to achieve comprehensive and rapid visual interpretation of their surroundings for improved safety and navigation. We introduce YOLO-BEV, an efficient framework that harnesses a unique surrounding cameras setup to generate a 2D bird's-eye view of the vehicular environment. By strategically positioning eight cameras, each at a 45-degree interval, our system captures and integrates imagery into a coherent 3x3 grid format, leaving the center blank, providing an enriched spatial representation that facilitates efficient processing. In our approach, we employ YOLO's detection mechanism, favoring its inherent advantages of swift response and compact model structure. Instead of leveraging the conventional YOLO detection head, we augment it with a custom-designed detection head, translating the panoramically captured data into a unified bird's-eye view map of ego car. Preliminary results validate the feasibility of YOLO-BEV in real-time vehicular perception tasks. With its streamlined architecture and potential for rapid deployment due to minimized parameters, YOLO-BEV poses as a promising tool that may reshape future perspectives in autonomous driving systems.