 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverage Optimization for Camera View Selection
Apr 06, 2026What makes a good viewpoint? The quality of the data used to learn 3D reconstructions is crucial for enabling efficient and accurate scene modeling. We study the active view selection problem and develop a principled analysis that yields a simple and interpretable criterion for selecting informative camera poses. Our key insight is that informative views can be obtained by minimizing a tractable approximation of the Fisher Information Gain, which reduces to favoring viewpoints that cover geometry that has been insufficiently observed by past cameras. This leads to a lightweight coverage-based view selection metric that avoids expensive transmittance estimation and is robust to noise and training dynamics. We call this metric COVER (Camera Optimization for View Exploration and Reconstruction). We integrate our method into the Nerfstudio framework and evaluate it on real datasets within fixed and embodied data acquisition scenarios. Across multiple datasets and radiance-field baselines, our method consistently improves reconstruction quality compared to state-of-the-art active view selection methods. Additional visualizations and our Nerfstudio package can be found at https://chengine.github.io/nbv_gym/.
Visual SLAM with DEM Anchoring for Lunar Surface Navigation
Mar 18, 2026Future lunar missions will require autonomous rovers capable of traversing tens of kilometers across challenging terrain while maintaining accurate localization and producing globally consistent maps. However, the absence of global positioning systems, extreme illumination, and low-texture regolith make long-range navigation on the Moon particularly difficult, as visual-inertial odometry pipelines accumulate drift over extended traverses. To address this challenge, we present a stereo visual simultaneous localization and mapping (SLAM) system that integrates learned feature detection and matching with global constraints from digital elevation models (DEMs). Our front-end employs learning-based feature extraction and matching to achieve robustness to illumination extremes and repetitive terrain, while the back-end incorporates DEM-derived height and surface-normal factors into a pose graph, providing absolute surface constraints that mitigate long-term drift. We validate our approach using both simulated lunar traverse data generated in Unreal Engine and real Moon/Mars analog data collected from Mt. Etna. Results demonstrate that DEM anchoring consistently reduces absolute trajectory error compared to baseline SLAM methods, lowering drift in long-range navigation even in repetitive or visually aliased terrain.
Neural Radiance Maps for Extraterrestrial Navigation and Path Planning
Mar 18, 2026Autonomous vehicles such as the Mars rovers currently lead the vanguard of surface exploration on extraterrestrial planets and moons. In order to accelerate the pace of exploration and science objectives, it is critical to plan safe and efficient paths for these vehicles. However, current rover autonomy is limited by a lack of global maps which can be easily constructed and stored for onboard re-planning. Recently, Neural Radiance Fields (NeRFs) have been introduced as a detailed 3D scene representation which can be trained from sparse 2D images and efficiently stored. We propose to use NeRFs to construct maps for online use in autonomous navigation, and present a planning framework which leverages the NeRF map to integrate local and global information. Our approach interpolates local cost observations across global regions using kernel ridge regression over terrain features extracted from the NeRF map, allowing the rover to re-route itself around untraversable areas discovered during online operation. We validate our approach in high-fidelity simulation and demonstrate lower cost and higher percentage success rate path planning compared to various baselines.
Full Stack Navigation, Mapping, and Planning for the Lunar Autonomy Challenge
Mar 18, 2026We present a modular, full-stack autonomy system for lunar surface navigation and mapping developed for the Lunar Autonomy Challenge. Operating in a GNSS-denied, visually challenging environment, our pipeline integrates semantic segmentation, stereo visual odometry, pose graph SLAM with loop closures, and layered planning and control. We leverage lightweight learning-based perception models for real-time segmentation and feature tracking and use a factor-graph backend to maintain globally consistent localization. High-level waypoint planning is designed to promote mapping coverage while encouraging frequent loop closures, and local motion planning uses arc sampling with geometric obstacle checks for efficient, reactive control. We evaluate our approach in the competition's high-fidelity lunar simulator, demonstrating centimeter-level localization accuracy, high-fidelity map generation, and strong repeatability across random seeds and rock distributions. Our solution achieved first place in the final competition evaluation.
Semantic Segmentation and Depth Estimation for Real-Time Lunar Surface Mapping Using 3D Gaussian Splatting
Mar 18, 2026Navigation and mapping on the lunar surface require robust perception under challenging conditions, including poorly textured environments, high-contrast lighting, and limited computational resources. This paper presents a real-time mapping framework that integrates dense perception models with a 3D Gaussian Splatting (3DGS) representation. We first benchmark several models on synthetic datasets generated with the LuPNT simulator, selecting a stereo dense depth estimation model based on Gated Recurrent Units for its balance of speed and accuracy in depth estimation, and a convolutional neural network for its superior performance in detecting semantic segments. Using ground truth poses to decouple the local scene understanding from the global state estimation, our pipeline reconstructs a 120-meter traverse with a geometric height accuracy of approximately 3 cm, outperforming a traditional point cloud baseline without LiDAR. The resulting 3DGS map enables novel view synthesis and serves as a foundation for a full SLAM system, where its capacity for joint map and pose optimization would offer significant advantages. Our results demonstrate that combining semantic segmentation and dense depth estimation with learned map representations is an effective approach for creating detailed, large-scale maps to support future lunar surface missions.
GNSS-based Lunar Orbit and Clock Estimation With Stochastic Cloning UD Filter
Jan 23, 2026This paper presents a terrestrial GNSS-based orbit and clock estimation framework for lunar navigation satellites. To enable high-precision estimation under the low-observability conditions encountered at lunar distances, we develop a stochastic-cloning UD-factorized filter and delayed-state smoother that provide enhanced numerical stability when processing precise time-differenced carrier phase (TDCP) measurements. A comprehensive dynamics and measurement model is formulated, explicitly accounting for relativistic coupling between orbital and clock states, lunar time-scale transformations, and signal propagation delays including ionospheric, plasmaspheric, and Shapiro effects. The proposed approach is evaluated using high-fidelity Monte-Carlo simulations incorporating realistic multi-constellation GNSS geometry, broadcast ephemeris errors, lunar satellite dynamics, and ionospheric and plasmaspheric delay computed from empirical electron density models. Simulation results demonstrate that combining ionosphere-free pseudorange and TDCP measurements achieves meter-level orbit accuracy and sub-millimeter-per-second velocity accuracy, satisfying the stringent signal-in-space error requirements of future Lunar Augmented Navigation Services (LANS).
Satellite Autonomous Clock Fault Monitoring with Inter-Satellite Ranges Using Euclidean Distance Matrices
May 02, 2025To address the need for robust positioning, navigation, and timing services in lunar environments, this paper proposes a novel onboard clock phase jump detection framework for satellite constellations using range measurements obtained from dual one-way inter-satellite links. Our approach leverages vertex redundantly rigid graphs to detect faults without relying on prior knowledge of satellite positions or clock biases, providing flexibility for lunar satellite networks with diverse satellite types and operators. We model satellite constellations as graphs, where satellites are vertices and inter-satellite links are edges. The proposed algorithm detects and identifies satellites with clock jumps by monitoring the singular values of the geometric-centered Euclidean distance matrix (GCEDM) of 5-clique sub-graphs. The proposed method is validated through simulations of a GPS constellation and a notional constellation around the Moon, demonstrating its effectiveness in various configurations.
Large-Scale GNSS Spreading Code Optimization
Oct 06, 2024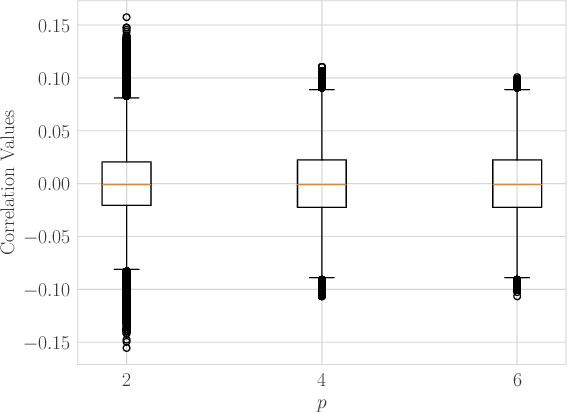

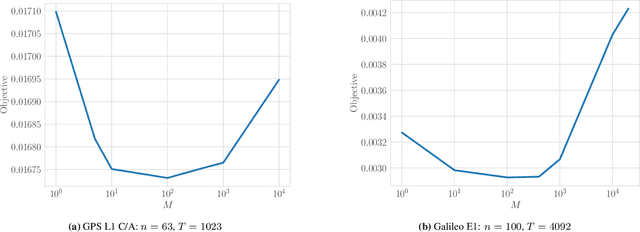

We propose a bit-flip descent method for optimizing binary spreading codes with large family sizes and long lengths, addressing the challenges of large-scale code design in GNSS and emerging PNT applications. The method iteratively flips code bits to improve the codes' auto- and cross-correlation properties. In our proposed method, bits are selected by sampling a small set of candidate bits and choosing the one that offers the best improvement in performance. The method leverages the fact that incremental impact of a bit flip on the auto- and cross-correlation may be efficiently computed without recalculating the entire function. We apply this method to two code design problems modeled after the GPS L1 C/A and Galileo E1 codes, demonstrating rapid convergence to low-correlation codes. The proposed approach offers a powerful tool for developing spreading codes that meet the demanding requirements of modern and future satellite navigation systems.
Multi-Robot Collaborative Localization and Planning with Inter-Ranging
Jun 24, 2024
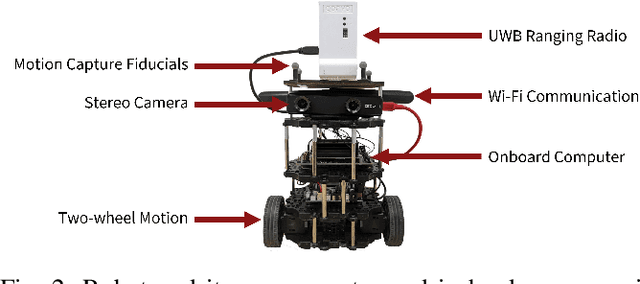
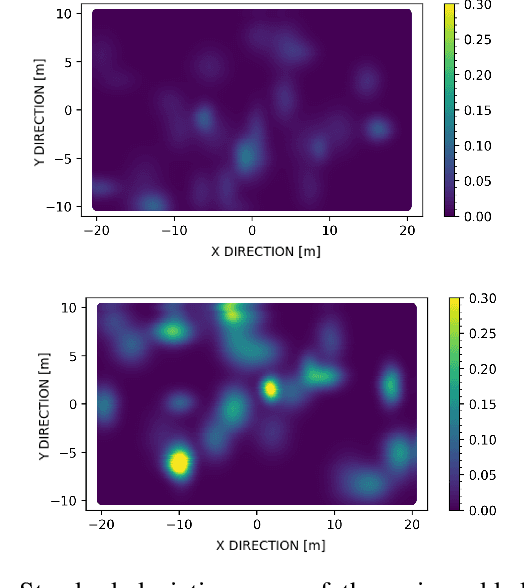
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common "anchor" and "tag" UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
Autonomous Constellation Fault Monitoring with Inter-satellite Links: A Rigidity-Based Approach
Jun 14, 2024To address the need for robust positioning, navigation, and timing services in lunar and Martian environments, this paper proposes a novel fault detection framework for satellite constellations using inter-satellite ranging (ISR). Traditional fault monitoring methods rely on intense monitoring from ground-based stations, which are impractical for lunar and Martian missions due to cost constraints. Our approach leverages graph-rigidity theory to detect faults without relying on precise ephemeris. We model satellite constellations as graphs where satellites are vertices and inter-satellite links are edges. By analyzing the Euclidean Distance Matrix (EDM) derived from ISR measurements, we identify faults through the singular values of the geometric-centered EDM (GCEDM). A neural network predictor is employed to handle the diverse geometry of the graph, enhancing fault detection robustness. The proposed method is validated through simulations of constellations around Mars and the Moon, demonstrating its effectiveness in various configurations. This research contributes to the reliable operation of satellite constellations for future lunar and Martian exploration missions.