 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Robot Collaborative Localization and Planning with Inter-Ranging
Jun 24, 2024
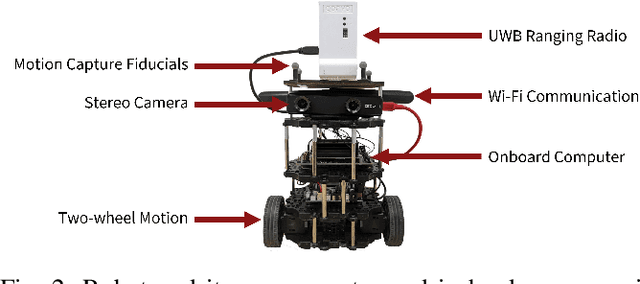
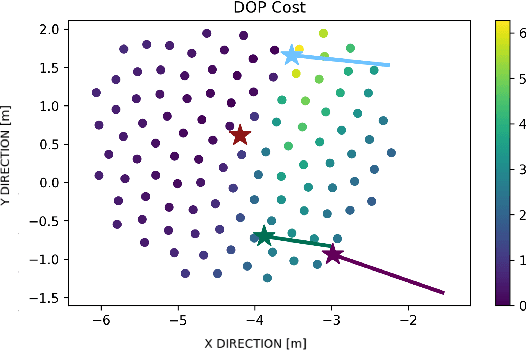
Robots often use feature-based image tracking to identify their position in their surrounding environment; however, feature-based image tracking is prone to errors in low-textured and poorly lit environments. Specifically, we investigate a scenario where robots are tasked with exploring the surface of the Moon and are required to have an accurate estimate of their position to be able to correctly geotag scientific measurements. To reduce localization error, we complement traditional feature-based image tracking with ultra-wideband (UWB) distance measurements between the robots. The robots use an advanced mesh-ranging protocol that allows them to continuously share distance measurements amongst each other rather than relying on the common "anchor" and "tag" UWB architecture. We develop a decentralized multi-robot coordination algorithm that actively plans paths based on measurement line-of-sight vectors amongst all robots to minimize collective localization error. We then demonstrate the emergent behavior of the proposed multi-robot coordination algorithm both in simulation and hardware to lower a geometry-based uncertainty metric and reduce localization error.
Greedy Detection and Exclusion of Multiple Faults using Euclidean Distance Matrices
Apr 19, 2024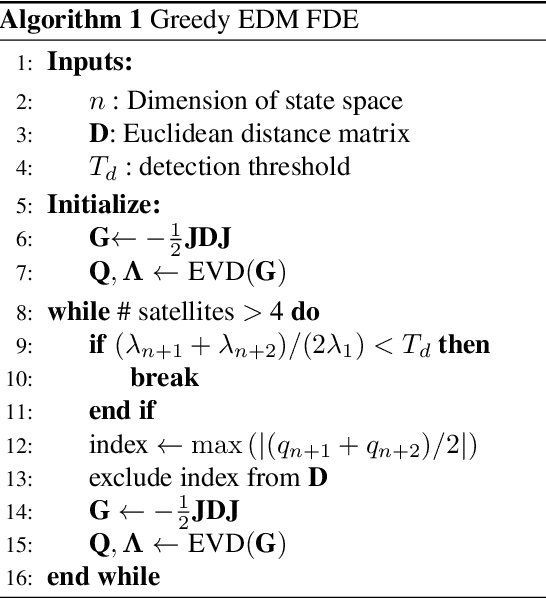
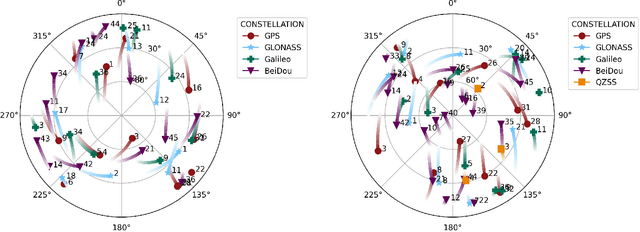
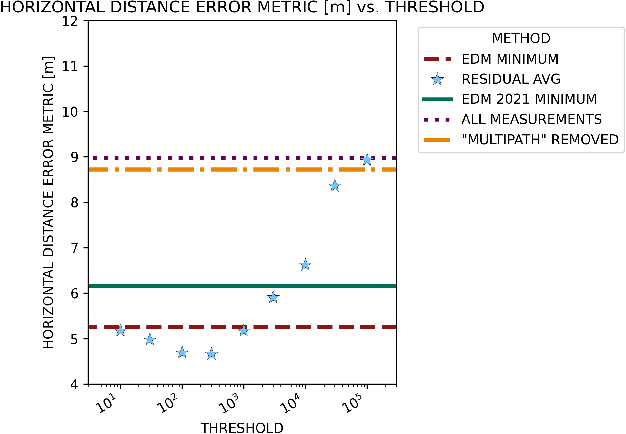
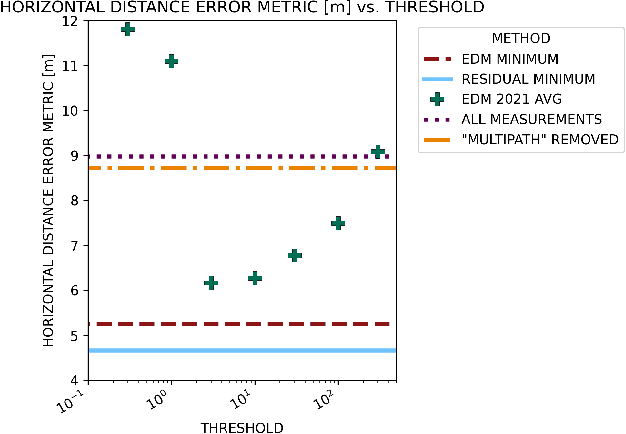
Numerous methods have been proposed for global navigation satellite system (GNSS) receivers to detect faulty GNSS signals. One such fault detection and exclusion (FDE) method is based on the mathematical concept of Euclidean distance matrices (EDMs). This paper outlines a greedy approach that uses an improved Euclidean distance matrix-based fault detection and exclusion algorithm. The novel greedy EDM FDE method implements a new fault detection test statistic and fault exclusion strategy that drastically simplifies the complexity of the algorithm over previous work. To validate the novel greedy EDM FDE algorithm, we created a simulated dataset using receiver locations from around the globe. The simulated dataset allows us to verify our results on 2,601 different satellite geometries. Additionally, we tested the greedy EDM FDE algorithm using a real-world dataset from seven different android phones. Across both the simulated and real-world datasets, the Python implementation of the greedy EDM FDE algorithm is shown to be computed an order of magnitude more rapidly than a comparable greedy residual FDE method while obtaining similar fault exclusion accuracy. We provide discussion on the comparative time complexities of greedy EDM FDE, greedy residual FDE, and solution separation. We also explain potential modifications to greedy residual FDE that can be added to alter performance characteristics.
gnss_lib_py: Analyzing GNSS Data with Python
Apr 12, 2024



This paper presents gnss_lib_py, a Python library used to parse, analyze, and visualize data from a variety of GNSS (Global Navigation Satellite Systems) data sources. The gnss_lib_py library's ease of use, modular capabilities, testing coverage, and extensive documentation make it an attractive tool not only for scientific and industry users wanting a quick, out-of-the-box solution but also for advanced GNSS users developing new GNSS algorithms. gnss_lib_py has already demonstrated its usefulness and impact through presentation in academic conferences, use in research papers, and adoption in graduate-level university course curricula.
Constrained Feedforward Neural Network Training via Reachability Analysis
Jul 16, 2021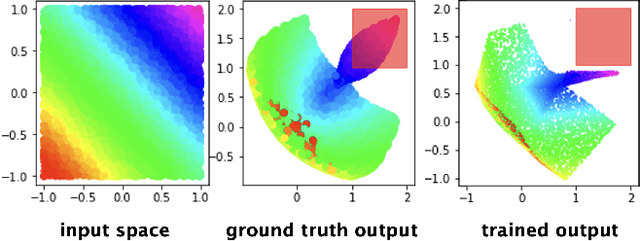
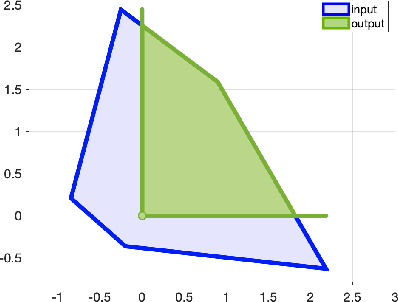
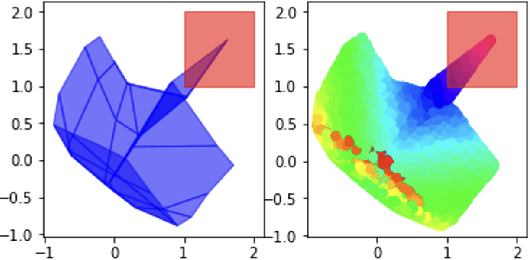
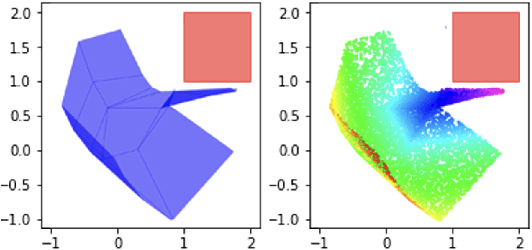
Neural networks have recently become popular for a wide variety of uses, but have seen limited application in safety-critical domains such as robotics near and around humans. This is because it remains an open challenge to train a neural network to obey safety constraints. Most existing safety-related methods only seek to verify that already-trained networks obey constraints, requiring alternating training and verification. Instead, this work proposes a constrained method to simultaneously train and verify a feedforward neural network with rectified linear unit (ReLU) nonlinearities. Constraints are enforced by computing the network's output-space reachable set and ensuring that it does not intersect with unsafe sets; training is achieved by formulating a novel collision-check loss function between the reachable set and unsafe portions of the output space. The reachable and unsafe sets are represented by constrained zonotopes, a convex polytope representation that enables differentiable collision checking. The proposed method is demonstrated successfully on a network with one nonlinearity layer and approximately 50 parameters.
Connectivity Maintenance for Multi-Robot Systems Under Motion and Sensing Uncertainties Using Distributed ADMM-based Trajectory Planning
Dec 17, 2020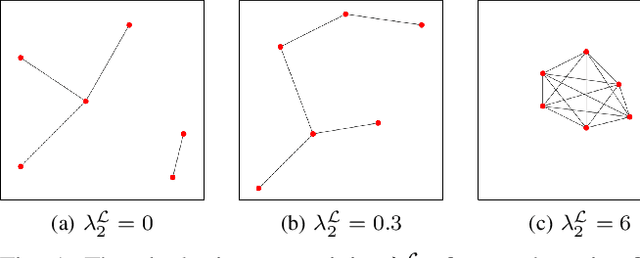
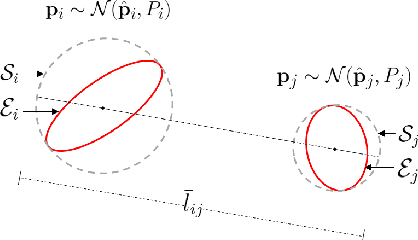
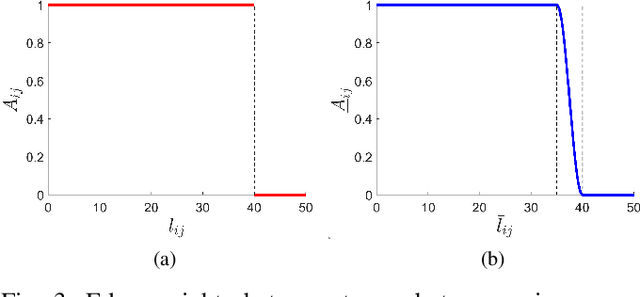
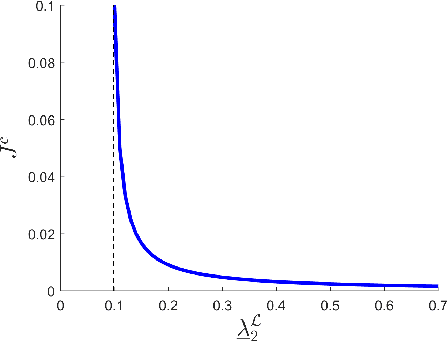
Inter-robot communication enables multi-robot systems to coordinate and execute complex missions efficiently. Thus, maintaining connectivity of the communication network between robots is essential for many multi-robot systems. In this paper, we present a trajectory planner for connectivity maintenance of a multi-robot system. Unlike previous connectivity maintenance works, we account for motion and sensing uncertainties inherent in practical robots. These uncertainties result in uncertain robot positions which directly affects the connectivity of the system. We first define a metric to quantify the connectivity of a system with uncertain robot positions. This metric is used to design our trajectory planner based on a distributed alternating direction method of multipliers (ADMM) framework. Next, we derive an approximation for the Hessian matrices required within the ADMM optimization step to reduce the computational load. Finally, simulation results are presented to statistically validate the connectivity maintenance of our trajectory planner.