 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatellite Autonomous Clock Fault Monitoring with Inter-Satellite Ranges Using Euclidean Distance Matrices
May 02, 2025To address the need for robust positioning, navigation, and timing services in lunar environments, this paper proposes a novel onboard clock phase jump detection framework for satellite constellations using range measurements obtained from dual one-way inter-satellite links. Our approach leverages vertex redundantly rigid graphs to detect faults without relying on prior knowledge of satellite positions or clock biases, providing flexibility for lunar satellite networks with diverse satellite types and operators. We model satellite constellations as graphs, where satellites are vertices and inter-satellite links are edges. The proposed algorithm detects and identifies satellites with clock jumps by monitoring the singular values of the geometric-centered Euclidean distance matrix (GCEDM) of 5-clique sub-graphs. The proposed method is validated through simulations of a GPS constellation and a notional constellation around the Moon, demonstrating its effectiveness in various configurations.
Autonomous Constellation Fault Monitoring with Inter-satellite Links: A Rigidity-Based Approach
Jun 14, 2024To address the need for robust positioning, navigation, and timing services in lunar and Martian environments, this paper proposes a novel fault detection framework for satellite constellations using inter-satellite ranging (ISR). Traditional fault monitoring methods rely on intense monitoring from ground-based stations, which are impractical for lunar and Martian missions due to cost constraints. Our approach leverages graph-rigidity theory to detect faults without relying on precise ephemeris. We model satellite constellations as graphs where satellites are vertices and inter-satellite links are edges. By analyzing the Euclidean Distance Matrix (EDM) derived from ISR measurements, we identify faults through the singular values of the geometric-centered EDM (GCEDM). A neural network predictor is employed to handle the diverse geometry of the graph, enhancing fault detection robustness. The proposed method is validated through simulations of constellations around Mars and the Moon, demonstrating its effectiveness in various configurations. This research contributes to the reliable operation of satellite constellations for future lunar and Martian exploration missions.
gnss_lib_py: Analyzing GNSS Data with Python
Apr 12, 2024



This paper presents gnss_lib_py, a Python library used to parse, analyze, and visualize data from a variety of GNSS (Global Navigation Satellite Systems) data sources. The gnss_lib_py library's ease of use, modular capabilities, testing coverage, and extensive documentation make it an attractive tool not only for scientific and industry users wanting a quick, out-of-the-box solution but also for advanced GNSS users developing new GNSS algorithms. gnss_lib_py has already demonstrated its usefulness and impact through presentation in academic conferences, use in research papers, and adoption in graduate-level university course curricula.
Learning-based methods to model small body gravity fields for proximity operations: Safety and Robustness
Dec 18, 2021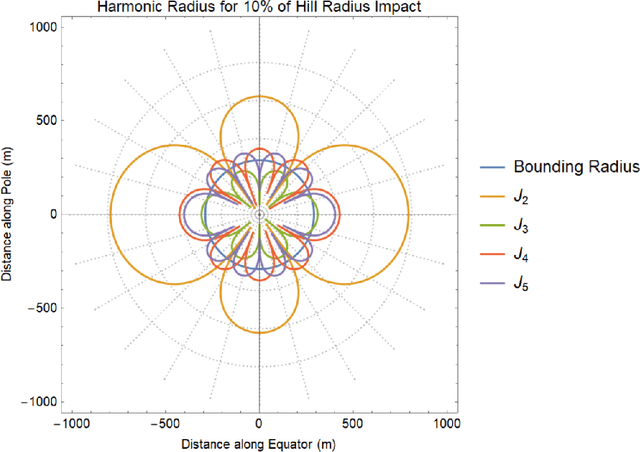
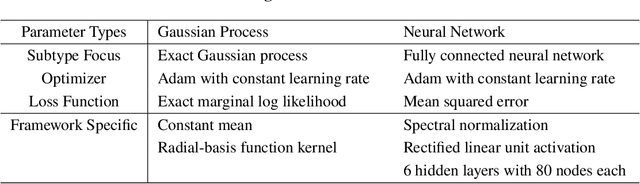
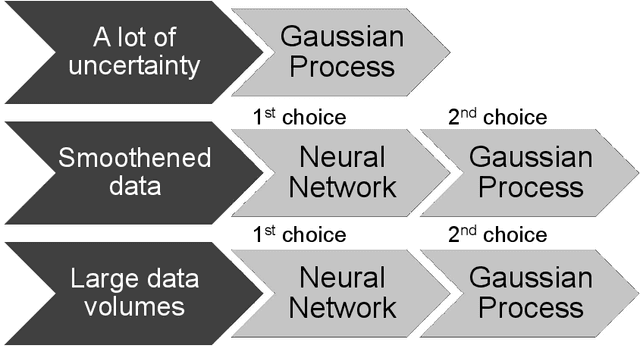
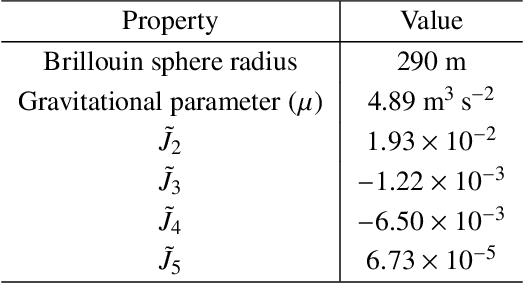
Accurate gravity field models are essential for safe proximity operations around small bodies. State-of-the-art techniques use spherical harmonics or high-fidelity polyhedron shape models. Unfortunately, these techniques can become inaccurate near the surface of the small body or have high computational costs, especially for binary or heterogeneous small bodies. New learning-based techniques do not encode a predefined structure and are more versatile. In exchange for versatility, learning-based techniques can be less robust outside the training data domain. In deployment, the spacecraft trajectory is the primary source of dynamics data. Therefore, the training data domain should include spacecraft trajectories to accurately evaluate the learned model's safety and robustness. We have developed a novel method for learning-based gravity models that directly uses the spacecraft's past trajectories. We further introduce a method to evaluate the safety and robustness of learning-based techniques via comparing accuracy within and outside of the training domain. We demonstrate this safety and robustness method for two learning-based frameworks: Gaussian processes and neural networks. Along with the detailed analysis provided, we empirically establish the need for robustness verification of learned gravity models when used for proximity operations.