 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTerrain-Adaptive Grouser Wheel for Optimal Planetary Exploration: Design and Experimental Investigation
May 23, 2026Planetary rovers operating in extraterrestrial environments often encounter significant mobility challenges due to varying terrain features such as gradients and granularity. While recent works in multimodal wheel design have explored adjustments in stiffness, compliance, and diameter as a means to improve terrain adaptability, full wheel grouser-adjustable designs remain largely unexplored. Grousers are a compelling feature to actuate, as granular terrains tend to require increased grouser height for improved wheel performance. As a result, we introduce [Anonymized Robot Name], a multimodal wheel capable of continuously adjusting its grouser height for terrain adaptation. The platform was evaluated across four representative surfaces, including vinyl flooring, coarse rock, pea gravel, and sand under two packing states, spanning a range of granular conditions. Results from 750 experimental trials demonstrate that adaptive deployment reduces slip by 30.0--58.0\% and improves travel time and energy consumption by up to 77.4\% in granular regimes relative to fixed configurations. Using the terrain trial data, a simplified scaling analysis was developed and validated, suggesting a relationship between terrain granularity and optimal grouser height for the tested configuration. No single grouser height minimized slip across all terrains, underscoring the limitations of fixed-wheel systems commonly used for planetary exploration. This observation reinforces the potential of grouser-adaptive morphology, such as [Anonymized Robot Name], as an effective solution for enhancing rover mobility across diverse and mobility-challenging extraterrestrial environments.
Maximal Controlled Invariant-MPC: Enhancing Feasibility and Reducing Conservatism through Terminal CBF Constraint in Safety-Critical Control
May 07, 2026Optimal control for safety-critical systems is often dependent on the conservativeness of constraints. Control Barrier Functions (CBFs) serve as a medium to represent such constraints, but constructing a minimally conservative CBF is a computationally intractable problem. Therefore, approaches that can guarantee safety while reducing conservatism will help improve the optimality of the system under consideration. Here, we present a Model Predictive Control (MPC) formulation using CBF as a terminal constraint, which is proven to improve feasibility and reachable sets with increasing prediction horizon. The constructive nature of the proofs allows for warm-starting the nonlinear optimization problem, thereby reducing the computational time substantially. Simulations are set up for a simple nonholonomic system to numerically validate the results, and it is observed that the number of infeasible points decreased by a factor of 1.7 to 2.7. The increase in reachable state space was demonstrated by the ability of the system to track trajectories that are entirely inside the unsafe region of the control barrier function.
Exact and Approximate Convex Reformulation of Linear Stochastic Optimal Control with Chance Constraints
Mar 19, 2026In this paper, we present an equivalent convex optimization formulation for discrete-time stochastic linear systems subject to linear chance constraints, alongside a tight convex relaxation for quadratic chance constraints. By lifting the state vector to encode moment information explicitly, the formulation captures linear chance constraints on states and controls across multiple time steps exactly, without conservatism, yielding strict improvements in both feasibility and optimality. For quadratic chance constraints, we derive convex approximations that are provably less conservative than existing methods. We validate the framework on minimum-snap trajectory generation for a quadrotor, demonstrating that the proposed approach remains feasible at noise levels an order of magnitude beyond the operating range of prior formulations.
Information-Driven Fault Detection and Identification for Multi-Agent Spacecraft Systems: Collaborative On-Orbit Inspection Mission
Nov 11, 2025This work presents a global-to-local, task-aware fault detection and identification (FDI) framework for multi-spacecraft systems conducting collaborative inspection missions in low Earth orbit. The inspection task is represented by a global information-driven cost functional that integrates the sensor model, spacecraft poses, and mission-level information-gain objectives. This formulation links guidance, control, and FDI by using the same cost function to drive both global task allocation and local sensing or motion decisions. Fault detection is achieved through comparisons between expected and observed task metrics, while higher-order cost-gradient measures enable the identification of faults among sensors, actuators, and state estimators. An adaptive thresholding mechanism captures the time-varying inspection geometry and dynamic mission conditions. Simulation results for representative multi-spacecraft inspection scenarios demonstrate the reliability of fault localization and classification under uncertainty, providing a unified, information-driven foundation for resilient autonomous inspection architectures.
Global Task-aware Fault Detection, Identification For On-Orbit Multi-Spacecraft Collaborative Inspection
May 06, 2025In this paper, we present a global-to-local task-aware fault detection and identification algorithm to detect failures in a multi-spacecraft system performing a collaborative inspection (referred to as global) task. The inspection task is encoded as a cost functional $\costH$ that informs global (task allocation and assignment) and local (agent-level) decision-making. The metric $\costH$ is a function of the inspection sensor model, and the agent full-pose. We use the cost functional $\costH$ to design a metric that compares the expected and actual performance to detect the faulty agent using a threshold. We use higher-order cost gradients $\costH$ to derive a new metric to identify the type of fault, including task-specific sensor fault, an agent-level actuator, and sensor faults. Furthermore, we propose an approach to design adaptive thresholds for each fault mentioned above to incorporate the time dependence of the inspection task. We demonstrate the efficacy of the proposed method empirically, by simulating and detecting faults (such as inspection sensor faults, actuators, and sensor faults) in a low-Earth orbit collaborative spacecraft inspection task using the metrics and the threshold designed using the global task cost $\costH$.
Nonlinear Controller Design for a Quadrotor with Inverted Pendulum
Aug 04, 2023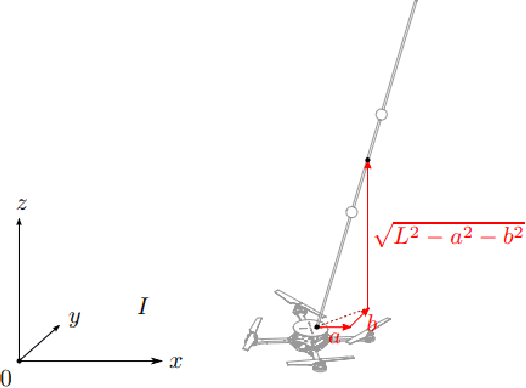



The quadrotor is a $6$ degrees-of-freedom (DoF) system with underactuation. Adding a spherical pendulum on top of a quadrotor further complicates the task of achieving any output tracking while stabilizing the rest. In this report, we present different types of controllers for the nonlinear dynamical system of quadrotor and pendulum combination, utilizing feedback-linearization and control Lyapunov function with quadratic programming (CLF-QP) approaches. We demonstrated trajectory tracking for quadrotor-only case as well as quadrotor-pendulum-combined case.
Neural-Rendezvous: Learning-based Robust Guidance and Control to Encounter Interstellar Objects
Aug 09, 2022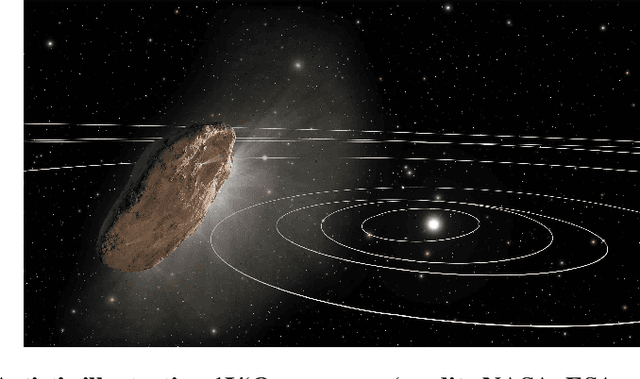
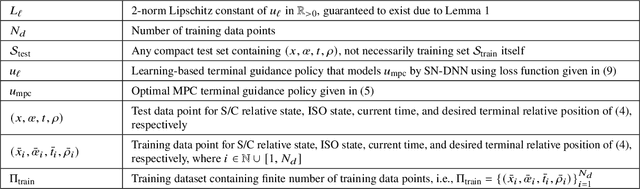
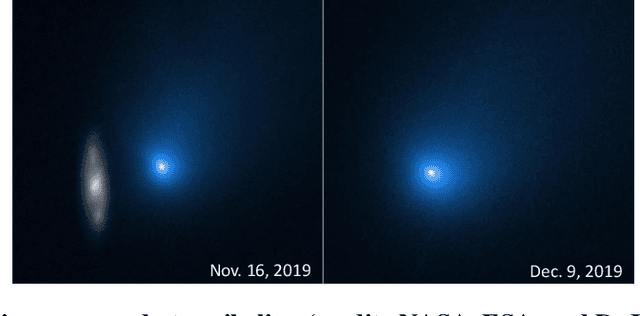

Interstellar objects (ISOs), astronomical objects not gravitationally bound to the Sun, are likely representatives of primitive materials invaluable in understanding exoplanetary star systems. Due to their poorly constrained orbits with generally high inclinations and relative velocities, however, exploring ISOs with conventional human-in-the-loop approaches is significantly challenging. This paper presents Neural-Rendezvous -- a deep learning-based guidance and control framework for encountering any fast-moving objects, including ISOs, robustly, accurately, and autonomously in real-time. It uses pointwise minimum norm tracking control on top of a guidance policy modeled by a spectrally-normalized deep neural network, where its hyperparameters are tuned with a newly introduced loss function directly penalizing the state trajectory tracking error. We rigorously show that, even in the challenging case of ISO exploration, Neural-Rendezvous provides 1) a high probability exponential bound on the expected spacecraft delivery error; and 2) a finite optimality gap with respect to the solution of model predictive control, both of which are indispensable especially for such a critical space mission. In numerical simulations, Neural-Rendezvous is demonstrated to achieve a terminal-time delivery error of less than 0.2 km for 99% of the ISO candidates with realistic state uncertainty, whilst retaining computational efficiency sufficient for real-time implementation.
Learning-based methods to model small body gravity fields for proximity operations: Safety and Robustness
Dec 18, 2021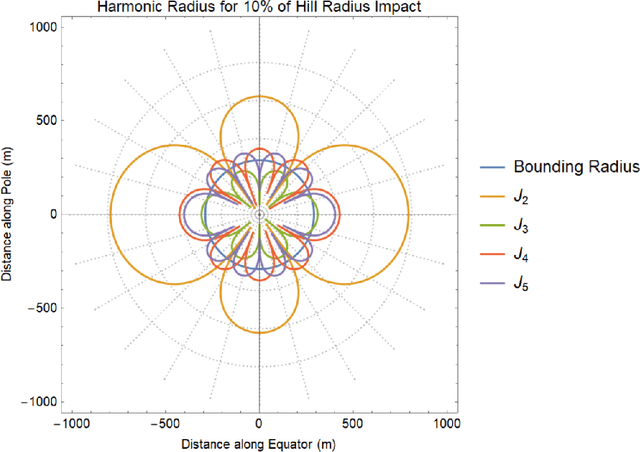
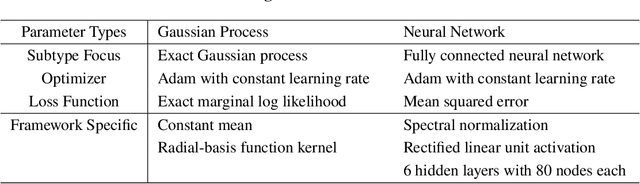
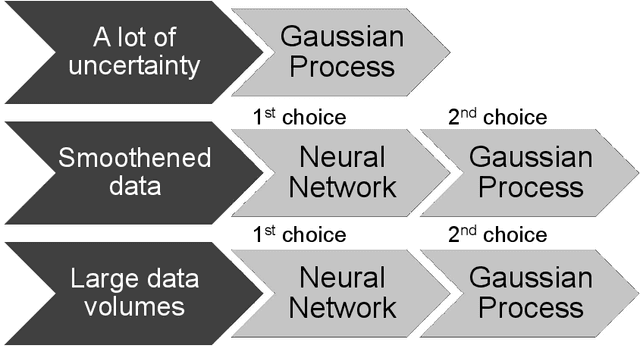
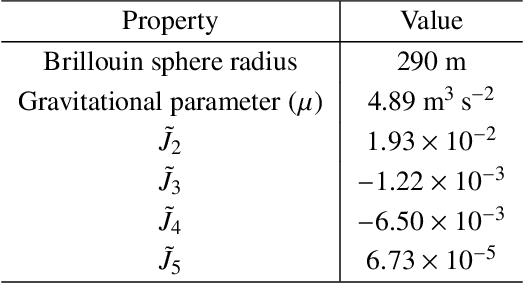
Accurate gravity field models are essential for safe proximity operations around small bodies. State-of-the-art techniques use spherical harmonics or high-fidelity polyhedron shape models. Unfortunately, these techniques can become inaccurate near the surface of the small body or have high computational costs, especially for binary or heterogeneous small bodies. New learning-based techniques do not encode a predefined structure and are more versatile. In exchange for versatility, learning-based techniques can be less robust outside the training data domain. In deployment, the spacecraft trajectory is the primary source of dynamics data. Therefore, the training data domain should include spacecraft trajectories to accurately evaluate the learned model's safety and robustness. We have developed a novel method for learning-based gravity models that directly uses the spacecraft's past trajectories. We further introduce a method to evaluate the safety and robustness of learning-based techniques via comparing accuracy within and outside of the training domain. We demonstrate this safety and robustness method for two learning-based frameworks: Gaussian processes and neural networks. Along with the detailed analysis provided, we empirically establish the need for robustness verification of learned gravity models when used for proximity operations.
Trajectory Optimization of Chance-Constrained Nonlinear Stochastic Systems for Motion Planning and Control
Jun 05, 2021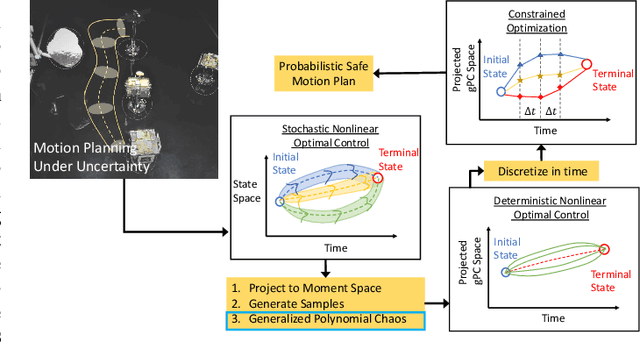
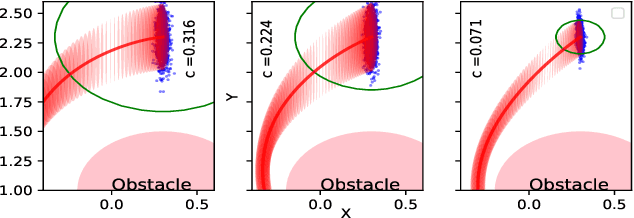

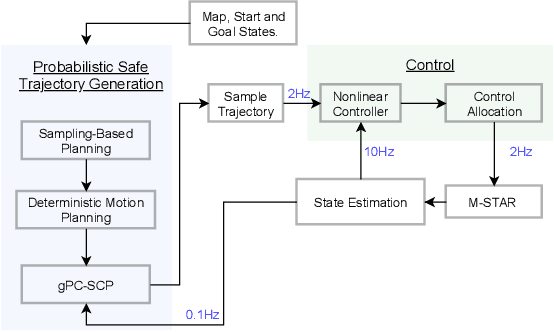
We present gPC-SCP: Generalized Polynomial Chaos-based Sequential Convex Programming method to compute a sub-optimal solution for a continuous-time chance-constrained stochastic nonlinear optimal control problem (SNOC) problem. The approach enables motion planning and control of robotic systems under uncertainty. The proposed method involves two steps. The first step is to derive a deterministic nonlinear optimal control problem (DNOC) with convex constraints that are surrogate to the SNOC by using gPC expansion and the distributionally-robust convex subset of the chance constraints. The second step is to solve the DNOC problem using sequential convex programming (SCP) for trajectory generation and control. We prove that in the unconstrained case, the optimal value of the DNOC converges to that of SNOC asymptotically and that any feasible solution of the constrained DNOC is a feasible solution of the chance-constrained SNOC. We derive a stable stochastic model predictive controller using the gPC-SCP for tracking a trajectory in the presence of uncertainty. We empirically demonstrate the efficacy of the gPC-SCP method for the following three test cases: 1) collision checking under uncertainty in actuation, 2) collision checking with stochastic obstacle model, and 3) safe trajectory tracking under uncertainty in the dynamics and obstacle location by using a receding horizon control approach. We validate the effectiveness of the gPC-SCP method on the robotic spacecraft testbed.
Chance-Constrained Trajectory Optimization for Safe Exploration and Learning of Nonlinear Systems
May 09, 2020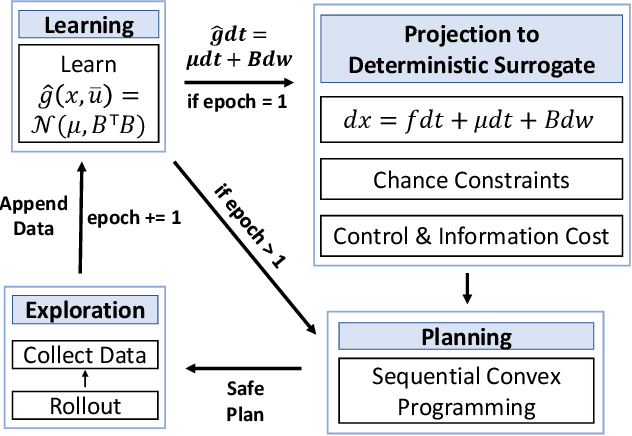
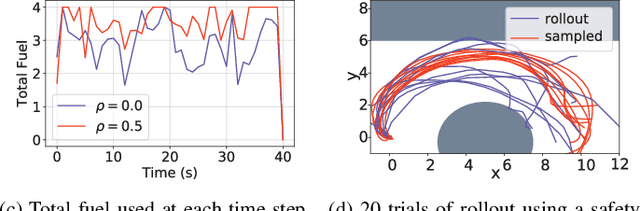
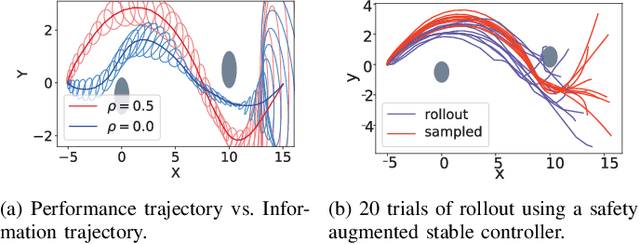
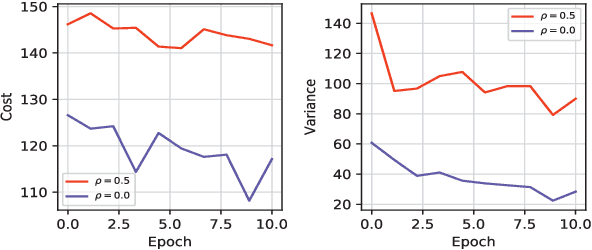
Learning-based control algorithms require collection of abundant supervision for training. Safe exploration algorithms enable this data collection to proceed safely even when only partial knowledge is available. In this paper, we present a new episodic framework to design a sub-optimal pool of motion plans that aid exploration for learning unknown residual dynamics under safety constraints. We derive an iterative convex optimization algorithm that solves an information-cost Stochastic Nonlinear Optimal Control problem (Info-SNOC), subject to chance constraints and approximated dynamics to compute a safe trajectory. The optimization objective encodes both performance and exploration, and the safety is incorporated as distributionally robust chance constraints. The dynamics are predicted from a robust learning model. We prove the safety of rollouts from our exploration method and reduction in uncertainty over epochs ensuring consistency of our learning method. We validate the effectiveness of Info-SNOC by designing and implementing a pool of safe trajectories for a planar robot.