 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformation-Driven Fault Detection and Identification for Multi-Agent Spacecraft Systems: Collaborative On-Orbit Inspection Mission
Nov 11, 2025This work presents a global-to-local, task-aware fault detection and identification (FDI) framework for multi-spacecraft systems conducting collaborative inspection missions in low Earth orbit. The inspection task is represented by a global information-driven cost functional that integrates the sensor model, spacecraft poses, and mission-level information-gain objectives. This formulation links guidance, control, and FDI by using the same cost function to drive both global task allocation and local sensing or motion decisions. Fault detection is achieved through comparisons between expected and observed task metrics, while higher-order cost-gradient measures enable the identification of faults among sensors, actuators, and state estimators. An adaptive thresholding mechanism captures the time-varying inspection geometry and dynamic mission conditions. Simulation results for representative multi-spacecraft inspection scenarios demonstrate the reliability of fault localization and classification under uncertainty, providing a unified, information-driven foundation for resilient autonomous inspection architectures.
Global Task-aware Fault Detection, Identification For On-Orbit Multi-Spacecraft Collaborative Inspection
May 06, 2025In this paper, we present a global-to-local task-aware fault detection and identification algorithm to detect failures in a multi-spacecraft system performing a collaborative inspection (referred to as global) task. The inspection task is encoded as a cost functional $\costH$ that informs global (task allocation and assignment) and local (agent-level) decision-making. The metric $\costH$ is a function of the inspection sensor model, and the agent full-pose. We use the cost functional $\costH$ to design a metric that compares the expected and actual performance to detect the faulty agent using a threshold. We use higher-order cost gradients $\costH$ to derive a new metric to identify the type of fault, including task-specific sensor fault, an agent-level actuator, and sensor faults. Furthermore, we propose an approach to design adaptive thresholds for each fault mentioned above to incorporate the time dependence of the inspection task. We demonstrate the efficacy of the proposed method empirically, by simulating and detecting faults (such as inspection sensor faults, actuators, and sensor faults) in a low-Earth orbit collaborative spacecraft inspection task using the metrics and the threshold designed using the global task cost $\costH$.
Physical Reservoir Computing in Hook-Shaped Rover Wheel Spokes for Real-Time Terrain Identification
Apr 17, 2025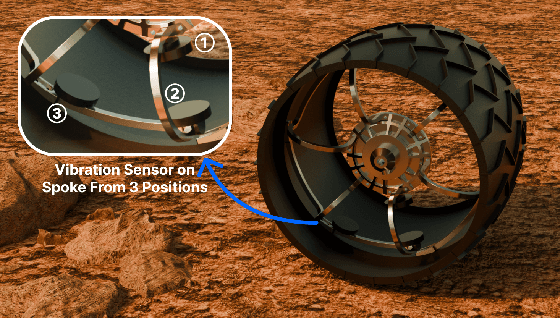
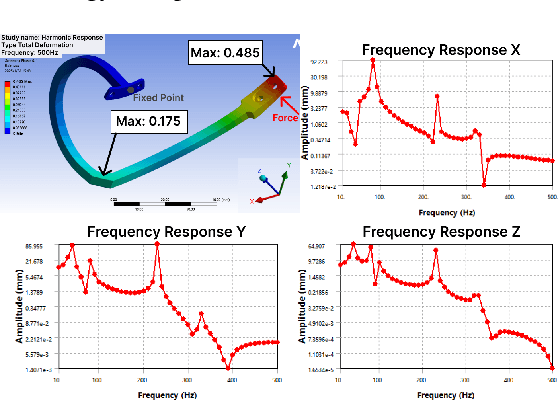
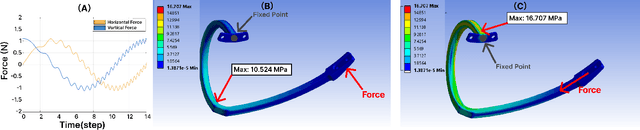
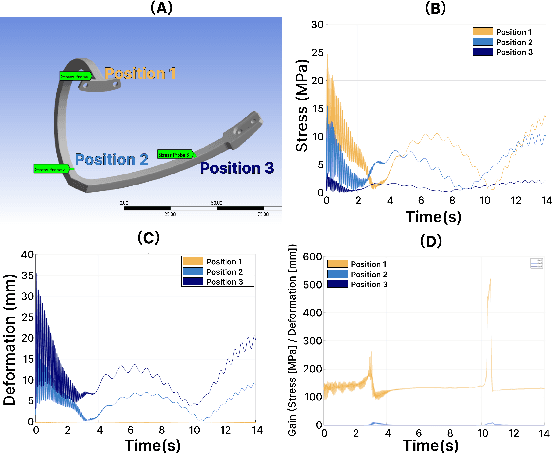
Effective terrain detection in unknown environments is crucial for safe and efficient robotic navigation. Traditional methods often rely on computationally intensive data processing, requiring extensive onboard computational capacity and limiting real-time performance for rovers. This study presents a novel approach that combines physical reservoir computing with piezoelectric sensors embedded in rover wheel spokes for real-time terrain identification. By leveraging wheel dynamics, terrain-induced vibrations are transformed into high-dimensional features for machine learning-based classification. Experimental results show that strategically placing three sensors on the wheel spokes achieves 90$\%$ classification accuracy, which demonstrates the accuracy and feasibility of the proposed method. The experiment results also showed that the system can effectively distinguish known terrains and identify unknown terrains by analyzing their similarity to learned categories. This method provides a robust, low-power framework for real-time terrain classification and roughness estimation in unstructured environments, enhancing rover autonomy and adaptability.
Constraint-Informed Learning for Warm Starting Trajectory Optimization
Dec 21, 2023Future spacecraft and surface robotic missions require increasingly capable autonomy stacks for exploring challenging and unstructured domains and trajectory optimization will be a cornerstone of such autonomy stacks. However, the nonlinear optimization solvers required remain too slow for use on relatively resource constrained flight-grade computers. In this work, we turn towards amortized optimization, a learning-based technique for accelerating optimization run times, and present TOAST: Trajectory Optimization with Merit Function Warm Starts. Offline, using data collected from a simulation, we train a neural network to learn a mapping to the full primal and dual solutions given the problem parameters. Crucially, we build upon recent results from decision-focused learning and present a set of decision-focused loss functions using the notion of merit functions for optimization problems. We show that training networks with such constraint-informed losses can better encode the structure of the trajectory optimization problem and jointly learn to reconstruct the primal-dual solution while also yielding improved constraint satisfaction. Through numerical experiments on a Lunar rover problem, we demonstrate that TOAST outperforms benchmark approaches in terms of both computation times and network prediction constraint satisfaction.
CART: Collision Avoidance and Robust Tracking Augmentation in Learning-based Motion Planning for Multi-Agent Systems
Jul 13, 2023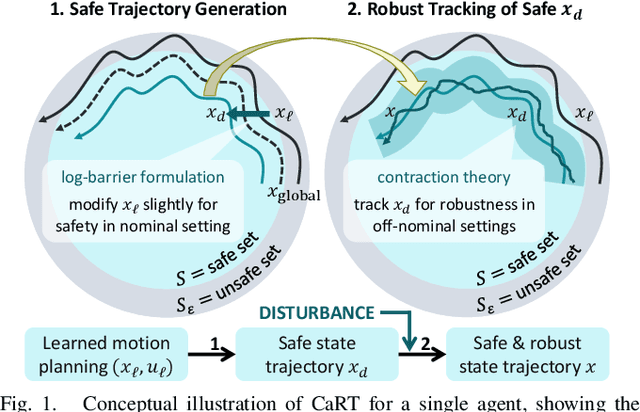
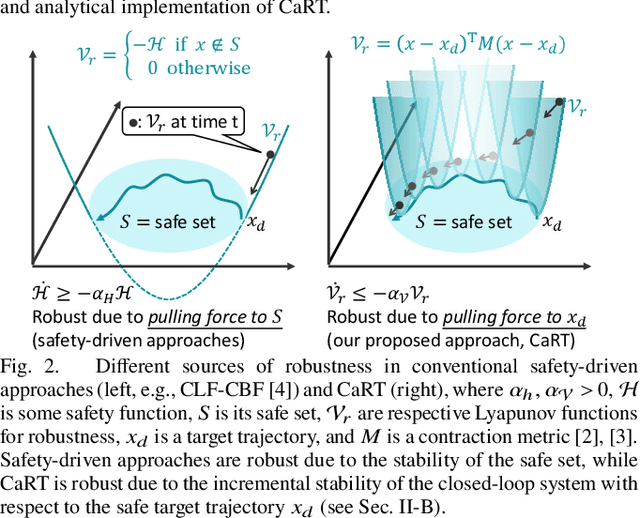
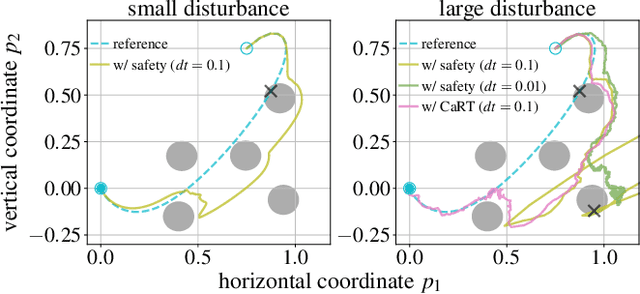

This paper presents CART, an analytical method to augment a learning-based, distributed motion planning policy of a nonlinear multi-agent system with real-time collision avoidance and robust tracking guarantees, independently of learning errors. We first derive an analytical form of an optimal safety filter for Lagrangian systems, which formally ensures a collision-free operation in a multi-agent setting in a disturbance-free environment, while allowing for its distributed implementation with minimal deviation from the learned policy. We then propose an analytical form of an optimal robust filter for Lagrangian systems to be used hierarchically with the learned collision-free target trajectory, which also enables distributed implementation and guarantees exponential boundedness of the trajectory tracking error for safety, even under the presence of deterministic and stochastic disturbance. These results are shown to extend further to general control-affine nonlinear systems using contraction theory. Our key contribution is to enhance the performance of the learned motion planning policy with collision avoidance and tracking-based robustness guarantees, independently of its original performance such as approximation errors and regret bounds in machine learning. We demonstrate the effectiveness of CART in motion planning and control of several examples of nonlinear systems, including spacecraft formation flying and rotor-failed UAV swarms.
Machine Learning Based Relative Orbit Transfer for Swarm Spacecraft Motion Planning
Jan 28, 2022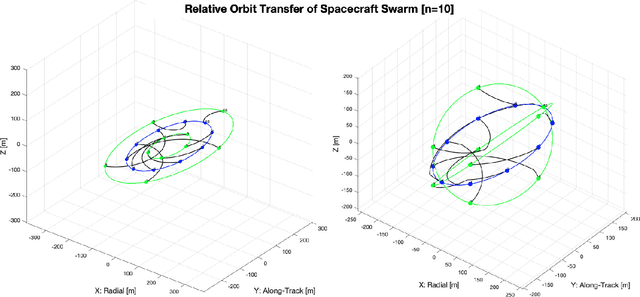
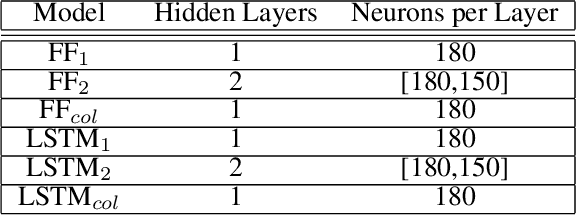
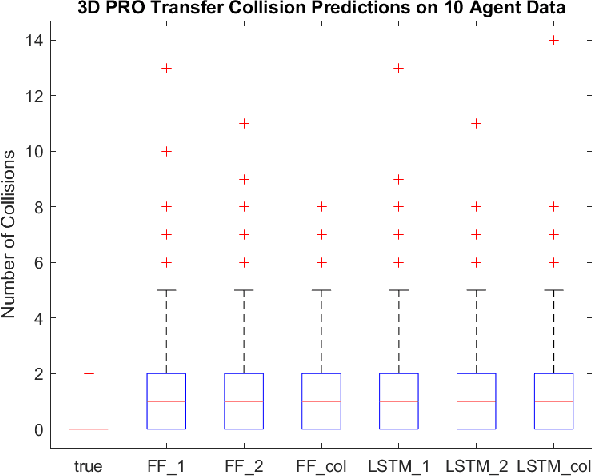
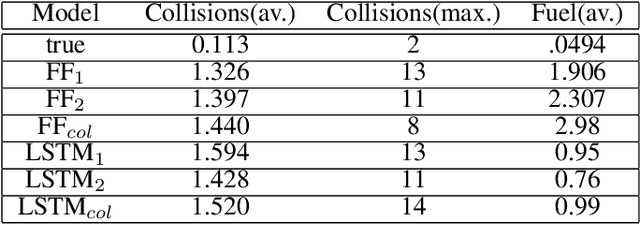
In this paper we describe a machine learning based framework for spacecraft swarm trajectory planning. In particular, we focus on coordinating motions of multi-spacecraft in formation flying through passive relative orbit(PRO) transfers. Accounting for spacecraft dynamics while avoiding collisions between the agents makes spacecraft swarm trajectory planning difficult. Centralized approaches can be used to solve this problem, but are computationally demanding and scale poorly with the number of agents in the swarm. As a result, centralized algorithms are ill-suited for real time trajectory planning on board small spacecraft (e.g. CubeSats) comprising the swarm. In our approach a neural network is used to approximate solutions of a centralized method. The necessary training data is generated using a centralized convex optimization framework through which several instances of the n=10 spacecraft swarm trajectory planning problem are solved. We are interested in answering the following questions which will give insight on the potential utility of deep learning-based approaches to the multi-spacecraft motion planning problem: 1) Can neural networks produce feasible trajectories that satisfy safety constraints (e.g. collision avoidance) and low in fuel cost? 2) Can a neural network trained using n spacecraft data be used to solve problems for spacecraft swarms of differing size?
Optimal Multi-Robot Motion Planning via Parabolic Relaxation
Nov 28, 2021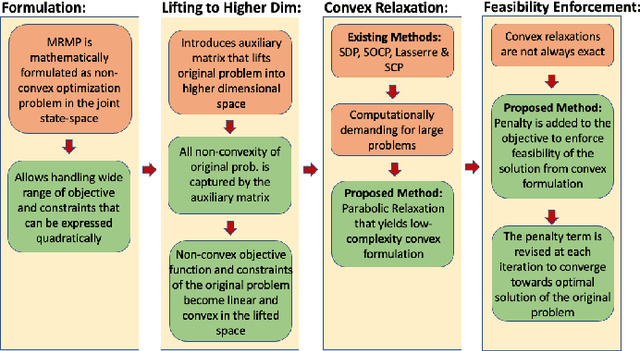
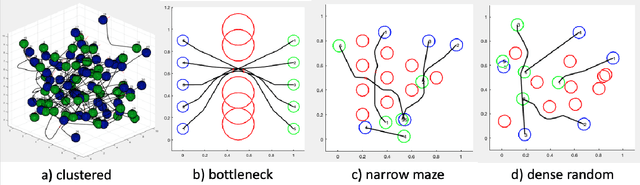
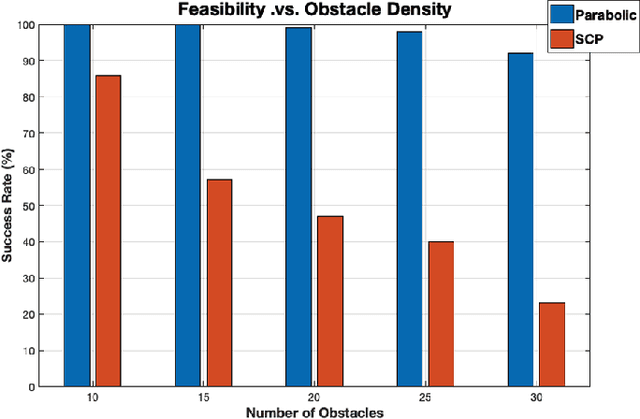
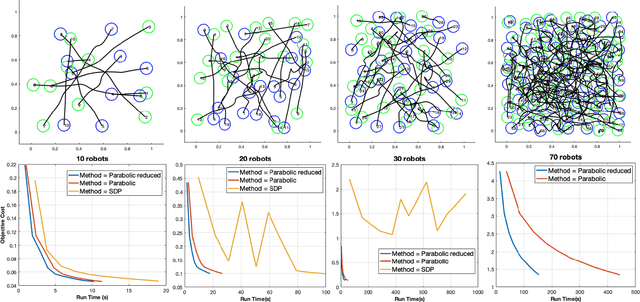
Multi-robot systems offer enhanced capability over their monolithic counterparts, but they come at a cost of increased complexity in coordination. To reduce complexity and to make the problem tractable, multi-robot motion planning (MRMP) methods in the literature adopt de-coupled approaches that sacrifice either optimality or dynamic feasibility. In this paper, we present a convexification method, namely "parabolic relaxation", to generate optimal and dynamically feasible trajectories for MRMP in the coupled joint-space of all robots. We leverage upon the proposed relaxation to tackle the problem complexity and to attain computational tractability for planning over one hundred robots in extremely clustered environments. We take a multi-stage optimization approach that consists of i) mathematically formulating MRMP as a non-convex optimization, ii) lifting the problem into a higher dimensional space, iii) convexifying the problem through the proposed computationally efficient parabolic relaxation, and iv) penalizing with iterative search to ensure feasibility and recovery of feasible and near-optimal solutions to the original problem. Our numerical experiments demonstrate that the proposed approach is capable of generating optimal and dynamically feasible trajectories for challenging motion planning problems with higher success rate than the state-of-the-art, yet remain computationally tractable for over one hundred robots in a highly dense environment.
GEOSCAN: Global Earth Observation using Swarm of Coordinated Autonomous Nanosats
Nov 27, 2021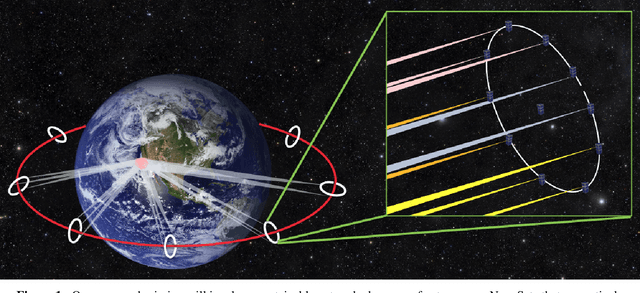
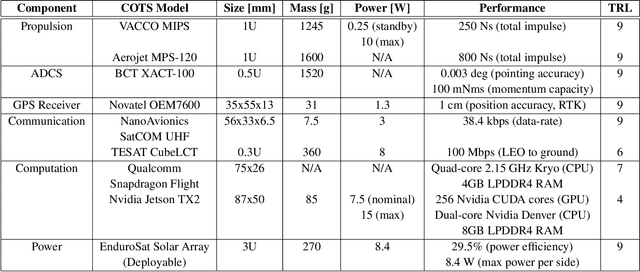
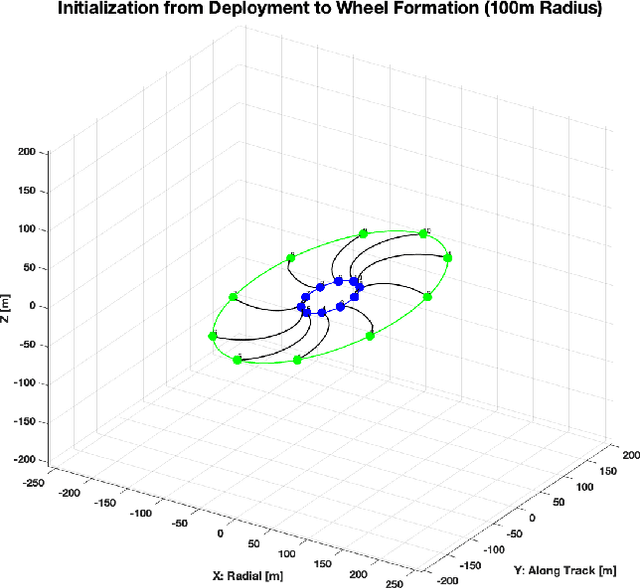
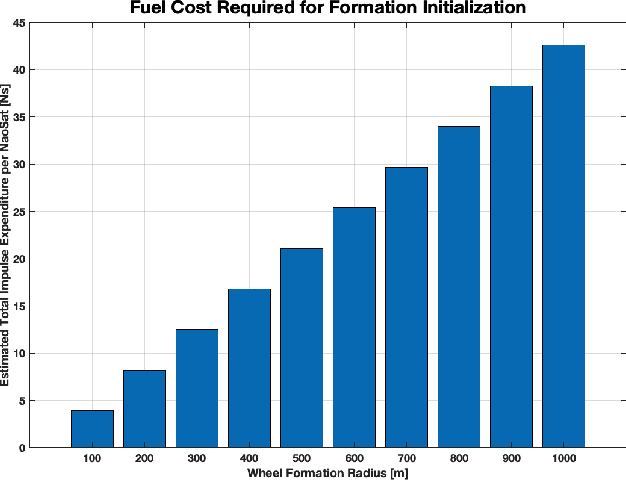
The climate crisis we are facing calls for significant improvements in our understanding of natural phenomena, with clouds being identified as a dominant source of uncertainty. To this end, the emerging field of 3D computed cloud tomography (CCT) aims to more precisely characterize clouds by utilizing multi-dimensional imaging to reconstruct their outer and inner structure. In this paper, we propose a future Earth observation mission concept, driven by the needs of CCT, that operates constellation of NanoSats to provide multi-angular, spectrally-resolved, spatial and temporal scientific measurements of natural atmospheric phenomena. Our proposed mission, GEOSCAN, will on-board active steering capability to rapidly reconfigure networked swarm of autonomous Nanosats to track evolving phenomena of interest, on-demand, in real-time. We present the structure of the GEOSCAN constellation and discuss details of the mission concept from both science and engineering perspectives. On the science side, we outline the types of remote Earth observation measurements that GEOSCAN enables beyond the state-of-the-art, and how such measurements translate to improvements in CCT that can lead to reduction in uncertainty of the global climate models (GCMs). From the engineering side, we investigate feasibility of the concept starting from hardware components of the NanoSat that form the basis of the constellation. In particular, we focus on the active steering capability of the GEOSCAN with algorithmic approaches that enable coordination from new software. We identify technology gaps that need to be bridged and discuss other aspects of the mission that require in-depth analysis to further mature the concept.
Multi-Agent Motion Planning using Deep Learning for Space Applications
Oct 15, 2020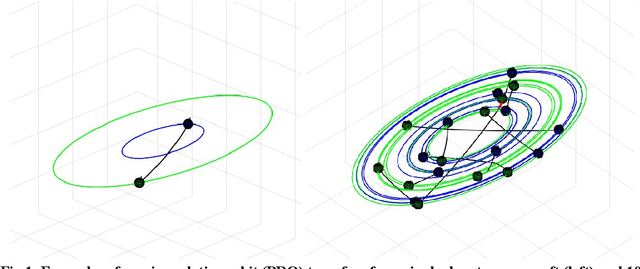
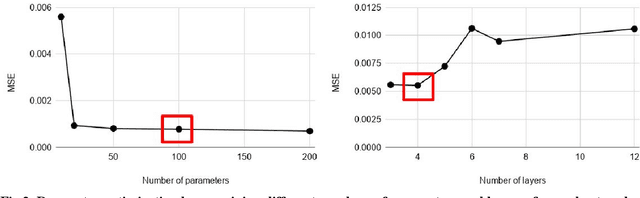
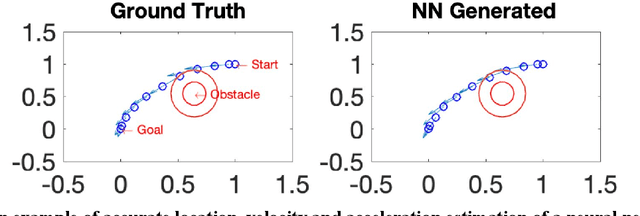
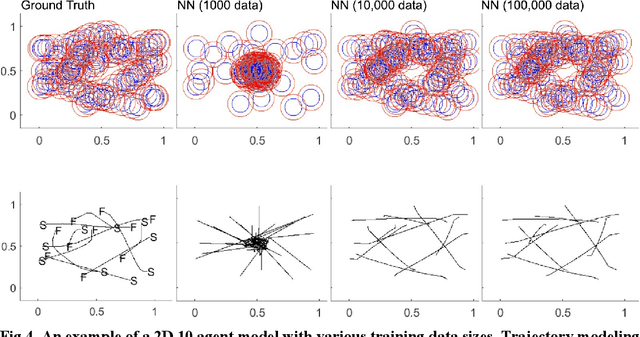
State-of-the-art motion planners cannot scale to a large number of systems. Motion planning for multiple agents is an NP (non-deterministic polynomial-time) hard problem, so the computation time increases exponentially with each addition of agents. This computational demand is a major stumbling block to the motion planner's application to future NASA missions involving the swarm of space vehicles. We applied a deep neural network to transform computationally demanding mathematical motion planning problems into deep learning-based numerical problems. We showed optimal motion trajectories can be accurately replicated using deep learning-based numerical models in several 2D and 3D systems with multiple agents. The deep learning-based numerical model demonstrates superior computational efficiency with plans generated 1000 times faster than the mathematical model counterpart.