 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMembership Inference Attacks Expose Participation Privacy in ECG Foundation Encoders
Apr 12, 2026Foundation-style ECG encoders pretrained with self-supervised learning are increasingly reused across tasks, institutions, and deployment contexts, often through model-as-a-service interfaces that expose scalar scores or latent representations. While such reuse improves data efficiency and generalization, it raises a participation privacy concern: can an adversary infer whether a specific individual or cohort contributed ECG data to pretraining, even when raw waveforms and diagnostic labels are never disclosed? In connected-health settings, training participation itself may reveal institutional affiliation, study enrollment, or sensitive health context. We present an implementation-grounded audit of membership inference attacks (MIAs) against modern self-supervised ECG foundation encoders, covering contrastive objectives (SimCLR, TS2Vec) and masked reconstruction objectives (CNN- and Transformer-based MAE). We evaluate three realistic attacker interfaces: (i) score-only black-box access to scalar outputs, (ii) adaptive learned attackers that aggregate subject-level statistics across repeated queries, and (iii) embedding-access attackers that probe latent representation geometry. Using a subject-centric protocol with window-to-subject aggregation and calibration at fixed false-positive rates under a cross-dataset auditing setting, we observe heterogeneous and objective-dependent participation leakage: leakage is most pronounced in small or institution-specific cohorts and, for contrastive encoders, can saturate in embedding space, while larger and more diverse datasets substantially attenuate operational tail risk. Overall, our results show that restricting access to raw signals or labels is insufficient to guarantee participation privacy, underscoring the need for deployment-aware auditing of reusable biosignal foundation encoders in connected-health systems.
CARE-ECG: Causal Agent-based Reasoning for Explainable and Counterfactual ECG Interpretation
Apr 12, 2026Large language models (LLMs) enable waveform-to-text ECG interpretation and interactive clinical questioning, yet most ECG-LLM systems still rely on weak signal-text alignment and retrieval without explicit physiological or causal structure. This limits grounding, temporal reasoning, and counterfactual "what-if" analysis central to clinical decision-making. We propose CARE-ECG, a causally structured ECG-language reasoning framework that unifies representation learning, diagnosis, and explanation in a single pipeline. CARE-ECG encodes multi-lead ECGs into temporally organized latent biomarkers, performs causal graph inference for probabilistic diagnosis, and supports counterfactual assessment via structural causal models. To improve faithfulness, CARE-ECG grounds language outputs through causal retrieval-augmented generation and a modular agentic pipeline that integrates history, diagnosis, and response with verification. Across multiple ECG benchmarks and expert QA settings, CARE-ECG improves diagnostic accuracy and explanation faithfulness while reducing hallucinations (e.g., 0.84 accuracy on Expert-ECG-QA and 0.76 on SCP-mapped PTB-XL under GPT-4). Overall, CARE-ECG provides traceable reasoning by exposing key latent drivers, causal evidence paths, and how alternative physiological states would change outcomes.
DISCO-TAB: A Hierarchical Reinforcement Learning Framework for Privacy-Preserving Synthesis of Complex Clinical Data
Apr 01, 2026The development of robust clinical decision support systems is frequently impeded by the scarcity of high-fidelity, privacy-preserving biomedical data. While Generative Large Language Models (LLMs) offer a promising avenue for synthetic data generation, they often struggle to capture the complex, non-linear dependencies and severe class imbalances inherent in Electronic Health Records (EHR), leading to statistically plausible but clinically invalid records. To bridge this gap, we introduce DISCO-TAB (DIScriminator-guided COntrol for TABular synthesis), a novel framework that orchestrates a fine-tuned LLM with a multi-objective discriminator system optimized via Reinforcement Learning. Unlike prior methods relying on scalar feedback, DISCO-TAB evaluates synthesis at four granularities, token, sentence, feature, and row, while integrating Automated Constraint Discovery and Inverse-Frequency Reward Shaping to autonomously preserve latent medical logic and resolve minority-class collapse. We rigorously validate our framework across diverse benchmarks, including high-dimensional, small-sample medical datasets (e.g., Heart Failure, Parkinson's). Our results demonstrate that hierarchical feedback yields state-of-the-art performance, achieving up to 38.2% improvement in downstream clinical classifier utility compared to GAN and Diffusion baselines, while ensuring exceptional statistical fidelity (JSD < 0.01) and robust resistance to membership inference attacks. This work establishes a new standard for generating trustworthy, utility-preserving synthetic tabular data for sensitive healthcare applications.
MedSpeak: A Knowledge Graph-Aided ASR Error Correction Framework for Spoken Medical QA
Feb 01, 2026Spoken question-answering (SQA) systems relying on automatic speech recognition (ASR) often struggle with accurately recognizing medical terminology. To this end, we propose MedSpeak, a novel knowledge graph-aided ASR error correction framework that refines noisy transcripts and improves downstream answer prediction by leveraging both semantic relationships and phonetic information encoded in a medical knowledge graph, together with the reasoning power of LLMs. Comprehensive experimental results on benchmarks demonstrate that MedSpeak significantly improves the accuracy of medical term recognition and overall medical SQA performance, establishing MedSpeak as a state-of-the-art solution for medical SQA. The code is available at https://github.com/RainieLLM/MedSpeak.
Styles + Persona-plug = Customized LLMs
Jan 10, 2026We discover a previously overlooked challenge in personalized text generation: personalization methods are increasingly applied under explicit style instructions, yet their behavior under such constraints remains poorly understood. To balance implicit personalization and explicit style, we formulate personalization as a distributional residual and propose PsPLUG, a lightweight soft-prompt plug-in trained with style-conditioned preference contrasts. Across LaMP benchmark, our framework improves persona alignment, maintains stylistic fidelity, and outperforms retrieval-based and soft-prompt baselines with minimal computation. These results show that residual modeling provides a simple and principled foundation for controllable, style-aware LLM personalization.
CARD: Cluster-level Adaptation with Reward-guided Decoding for Personalized Text Generation
Jan 09, 2026Adapting large language models to individual users remains challenging due to the tension between fine-grained personalization and scalable deployment. We present CARD, a hierarchical framework that achieves effective personalization through progressive refinement. CARD first clusters users according to shared stylistic patterns and learns cluster-specific LoRA adapters, enabling robust generalization and strong low-resource performance. To capture individual differences within each cluster, we propose an implicit preference learning mechanism that contrasts user-authored text with cluster-level generations, allowing the model to infer user-specific style preferences without manual annotation. At inference time, CARD injects personalization exclusively at decoding via lightweight user preference vectors and low-rank logit corrections, while keeping the base model frozen. Experiments on the LaMP and LongLaMP benchmarks show that CARD achieves competitive or superior generation quality compared to state-of-the-art baselines, while significantly improving efficiency and scalability for practical personalized text generation.
Information-Driven Fault Detection and Identification for Multi-Agent Spacecraft Systems: Collaborative On-Orbit Inspection Mission
Nov 11, 2025This work presents a global-to-local, task-aware fault detection and identification (FDI) framework for multi-spacecraft systems conducting collaborative inspection missions in low Earth orbit. The inspection task is represented by a global information-driven cost functional that integrates the sensor model, spacecraft poses, and mission-level information-gain objectives. This formulation links guidance, control, and FDI by using the same cost function to drive both global task allocation and local sensing or motion decisions. Fault detection is achieved through comparisons between expected and observed task metrics, while higher-order cost-gradient measures enable the identification of faults among sensors, actuators, and state estimators. An adaptive thresholding mechanism captures the time-varying inspection geometry and dynamic mission conditions. Simulation results for representative multi-spacecraft inspection scenarios demonstrate the reliability of fault localization and classification under uncertainty, providing a unified, information-driven foundation for resilient autonomous inspection architectures.
Global Task-aware Fault Detection, Identification For On-Orbit Multi-Spacecraft Collaborative Inspection
May 06, 2025In this paper, we present a global-to-local task-aware fault detection and identification algorithm to detect failures in a multi-spacecraft system performing a collaborative inspection (referred to as global) task. The inspection task is encoded as a cost functional $\costH$ that informs global (task allocation and assignment) and local (agent-level) decision-making. The metric $\costH$ is a function of the inspection sensor model, and the agent full-pose. We use the cost functional $\costH$ to design a metric that compares the expected and actual performance to detect the faulty agent using a threshold. We use higher-order cost gradients $\costH$ to derive a new metric to identify the type of fault, including task-specific sensor fault, an agent-level actuator, and sensor faults. Furthermore, we propose an approach to design adaptive thresholds for each fault mentioned above to incorporate the time dependence of the inspection task. We demonstrate the efficacy of the proposed method empirically, by simulating and detecting faults (such as inspection sensor faults, actuators, and sensor faults) in a low-Earth orbit collaborative spacecraft inspection task using the metrics and the threshold designed using the global task cost $\costH$.
DEMENTIA-PLAN: An Agent-Based Framework for Multi-Knowledge Graph Retrieval-Augmented Generation in Dementia Care
Mar 26, 2025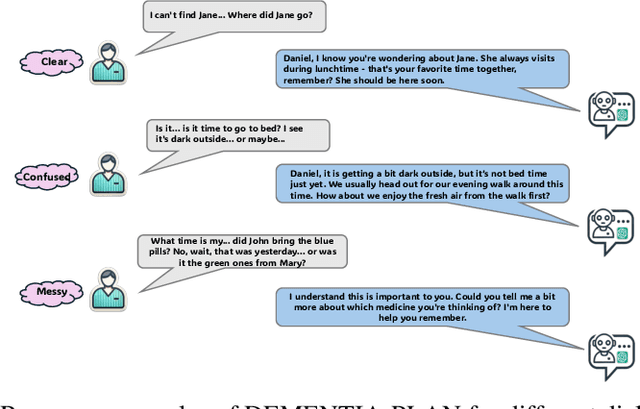
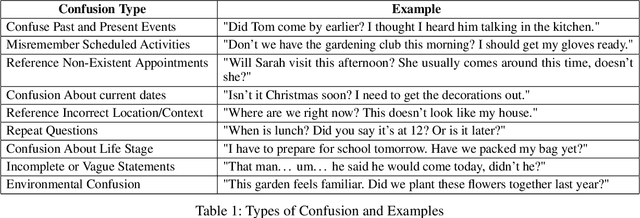
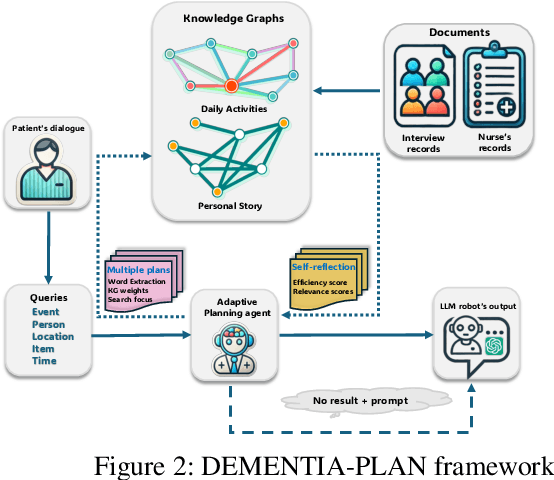
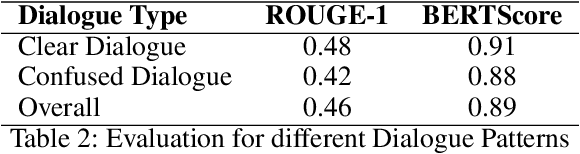
Mild-stage dementia patients primarily experience two critical symptoms: severe memory loss and emotional instability. To address these challenges, we propose DEMENTIA-PLAN, an innovative retrieval-augmented generation framework that leverages large language models to enhance conversational support. Our model employs a multiple knowledge graph architecture, integrating various dimensional knowledge representations including daily routine graphs and life memory graphs. Through this multi-graph architecture, DEMENTIA-PLAN comprehensively addresses both immediate care needs and facilitates deeper emotional resonance through personal memories, helping stabilize patient mood while providing reliable memory support. Our notable innovation is the self-reflection planning agent, which systematically coordinates knowledge retrieval and semantic integration across multiple knowledge graphs, while scoring retrieved content from daily routine and life memory graphs to dynamically adjust their retrieval weights for optimized response generation. DEMENTIA-PLAN represents a significant advancement in the clinical application of large language models for dementia care, bridging the gap between AI tools and caregivers interventions.
Building Trust in Mental Health Chatbots: Safety Metrics and LLM-Based Evaluation Tools
Aug 03, 2024Objective: This study aims to develop and validate an evaluation framework to ensure the safety and reliability of mental health chatbots, which are increasingly popular due to their accessibility, human-like interactions, and context-aware support. Materials and Methods: We created an evaluation framework with 100 benchmark questions and ideal responses, and five guideline questions for chatbot responses. This framework, validated by mental health experts, was tested on a GPT-3.5-turbo-based chatbot. Automated evaluation methods explored included large language model (LLM)-based scoring, an agentic approach using real-time data, and embedding models to compare chatbot responses against ground truth standards. Results: The results highlight the importance of guidelines and ground truth for improving LLM evaluation accuracy. The agentic method, dynamically accessing reliable information, demonstrated the best alignment with human assessments. Adherence to a standardized, expert-validated framework significantly enhanced chatbot response safety and reliability. Discussion: Our findings emphasize the need for comprehensive, expert-tailored safety evaluation metrics for mental health chatbots. While LLMs have significant potential, careful implementation is necessary to mitigate risks. The superior performance of the agentic approach underscores the importance of real-time data access in enhancing chatbot reliability. Conclusion: The study validated an evaluation framework for mental health chatbots, proving its effectiveness in improving safety and reliability. Future work should extend evaluations to accuracy, bias, empathy, and privacy to ensure holistic assessment and responsible integration into healthcare. Standardized evaluations will build trust among users and professionals, facilitating broader adoption and improved mental health support through technology.