 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Algorithms for Robotic Aquaculture Monitoring
Apr 20, 2022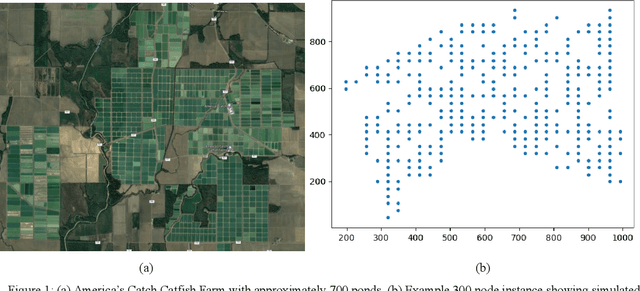
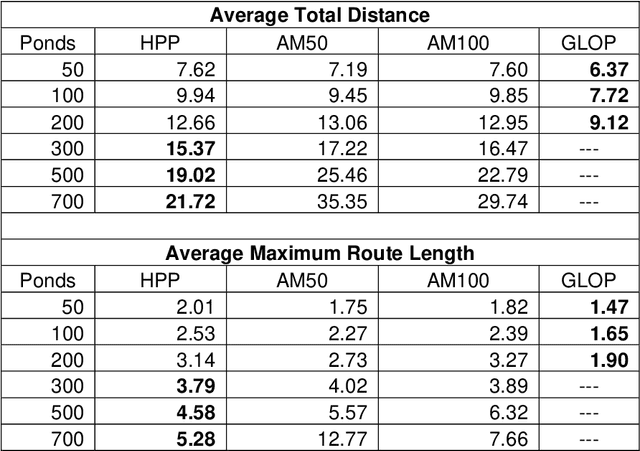
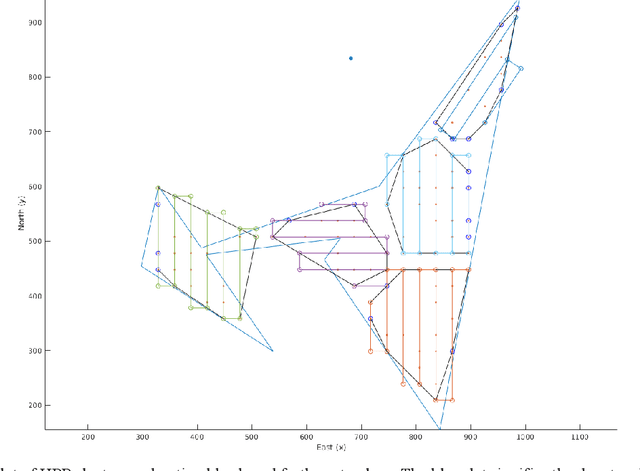
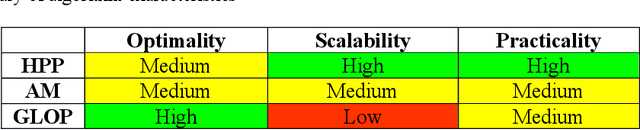
Aerial drones have great potential to monitor large areas quickly and efficiently. Aquaculture is an industry that requires continuous water quality data to successfully grow and harvest fish. The Hybrid Aerial Underwater Robotic System (HAUCS) is designed to collect water quality data of aquaculture ponds to reduce labor costs for farmers. The routing of drones to cover each fish pond on an aquaculture farm can be reduced to the Vehicle Routing Problem. A dataset is created to simulate the distribution of ponds on a farm and is used to assess the HAUCS Path Planning Algorithm (HPP). Its performance is compared with the Google Linear Optimization Package (GLOP) and a Graph Attention Model (AM) for routing problems. GLOP is the most efficient solver for 50 to 200 ponds at the expense of long run times, while HPP outperforms the other methods in solution quality and run time for instances larger than 200 ponds.
Multi-Agent Motion Planning using Deep Learning for Space Applications
Oct 15, 2020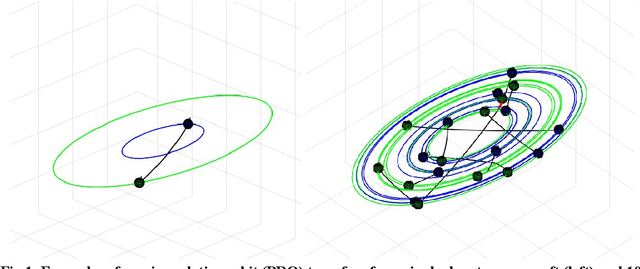
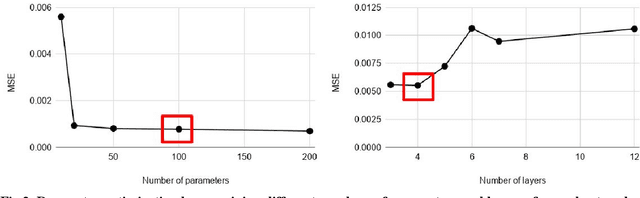
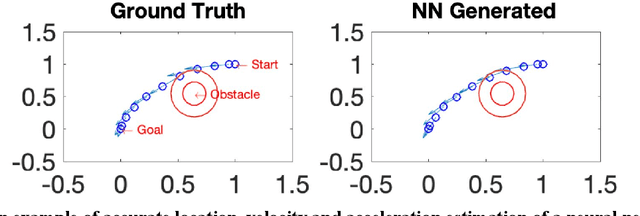
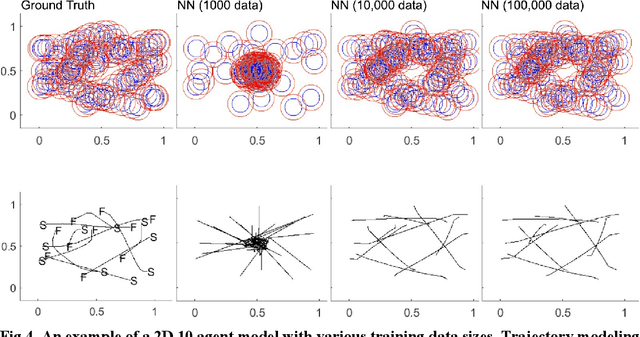
State-of-the-art motion planners cannot scale to a large number of systems. Motion planning for multiple agents is an NP (non-deterministic polynomial-time) hard problem, so the computation time increases exponentially with each addition of agents. This computational demand is a major stumbling block to the motion planner's application to future NASA missions involving the swarm of space vehicles. We applied a deep neural network to transform computationally demanding mathematical motion planning problems into deep learning-based numerical problems. We showed optimal motion trajectories can be accurately replicated using deep learning-based numerical models in several 2D and 3D systems with multiple agents. The deep learning-based numerical model demonstrates superior computational efficiency with plans generated 1000 times faster than the mathematical model counterpart.