 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Algorithms for Robotic Aquaculture Monitoring
Apr 20, 2022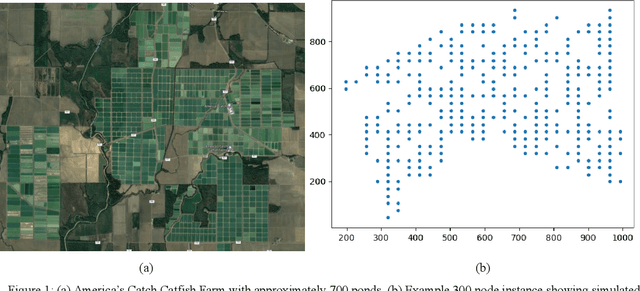
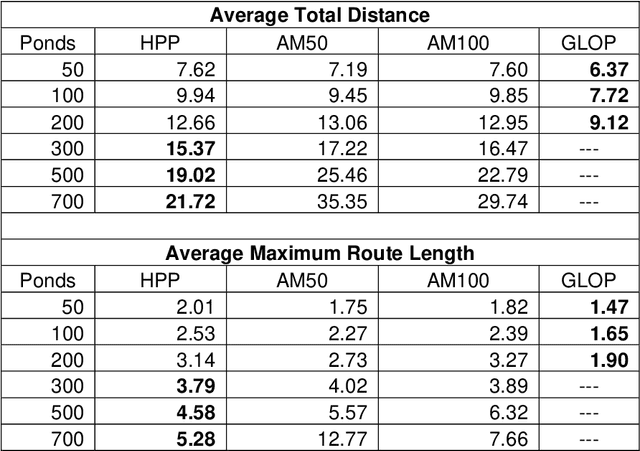
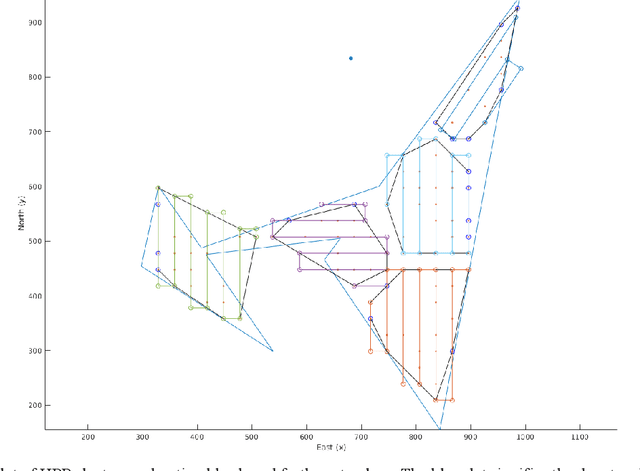
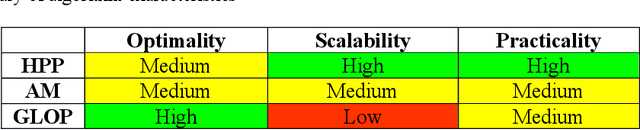
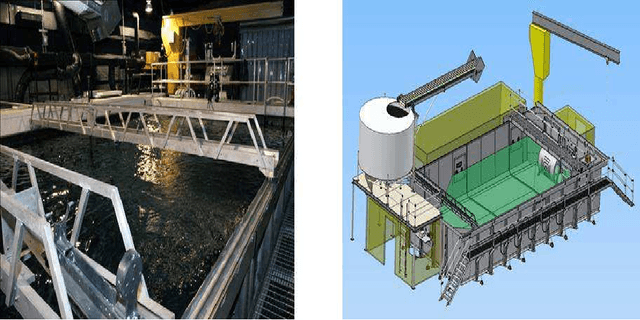
Aerial drones have great potential to monitor large areas quickly and efficiently. Aquaculture is an industry that requires continuous water quality data to successfully grow and harvest fish. The Hybrid Aerial Underwater Robotic System (HAUCS) is designed to collect water quality data of aquaculture ponds to reduce labor costs for farmers. The routing of drones to cover each fish pond on an aquaculture farm can be reduced to the Vehicle Routing Problem. A dataset is created to simulate the distribution of ponds on a farm and is used to assess the HAUCS Path Planning Algorithm (HPP). Its performance is compared with the Google Linear Optimization Package (GLOP) and a Graph Attention Model (AM) for routing problems. GLOP is the most efficient solver for 50 to 200 ponds at the expense of long run times, while HPP outperforms the other methods in solution quality and run time for instances larger than 200 ponds.
NTIRE 2020 Challenge on NonHomogeneous Dehazing
May 07, 2020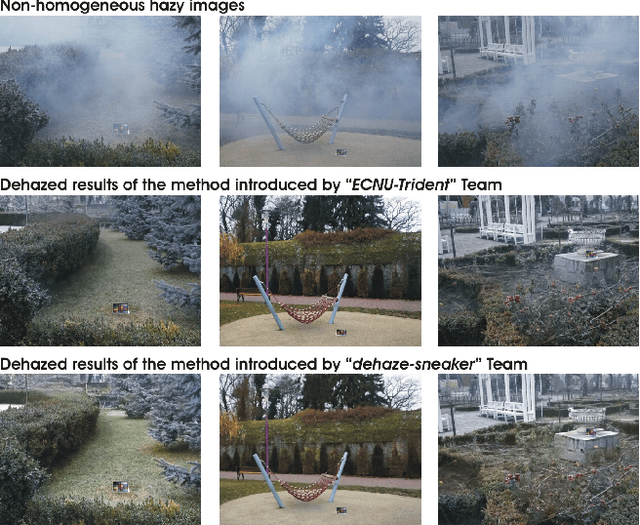
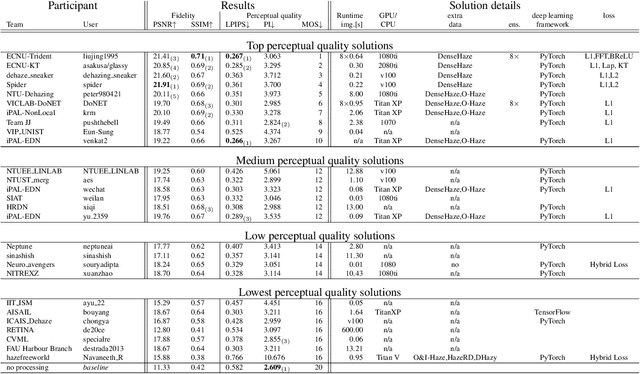
This paper reviews the NTIRE 2020 Challenge on NonHomogeneous Dehazing of images (restoration of rich details in hazy image). We focus on the proposed solutions and their results evaluated on NH-Haze, a novel dataset consisting of 55 pairs of real haze free and nonhomogeneous hazy images recorded outdoor. NH-Haze is the first realistic nonhomogeneous haze dataset that provides ground truth images. The nonhomogeneous haze has been produced using a professional haze generator that imitates the real conditions of haze scenes. 168 participants registered in the challenge and 27 teams competed in the final testing phase. The proposed solutions gauge the state-of-the-art in image dehazing.
Algorithmic Design and Implementation of Unobtrusive Multistatic Serial LiDAR Image
Nov 08, 2019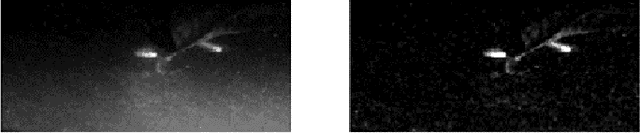
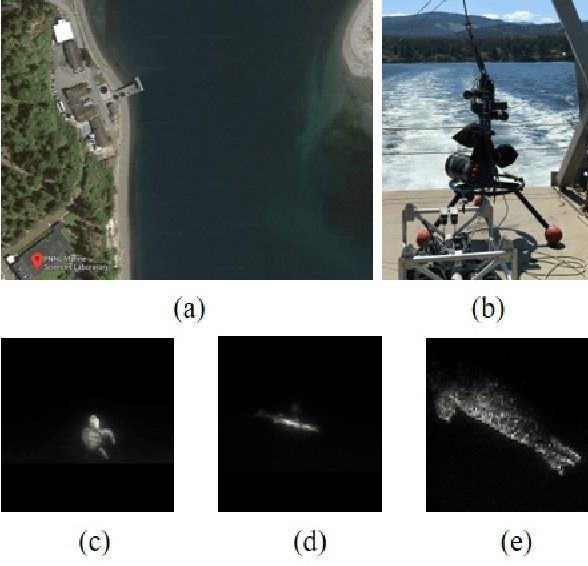
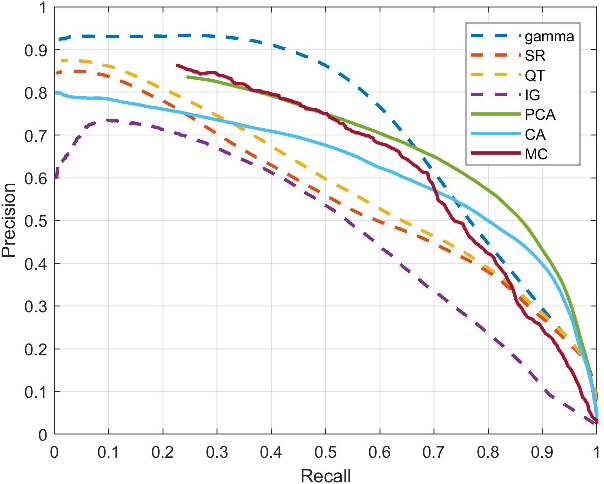
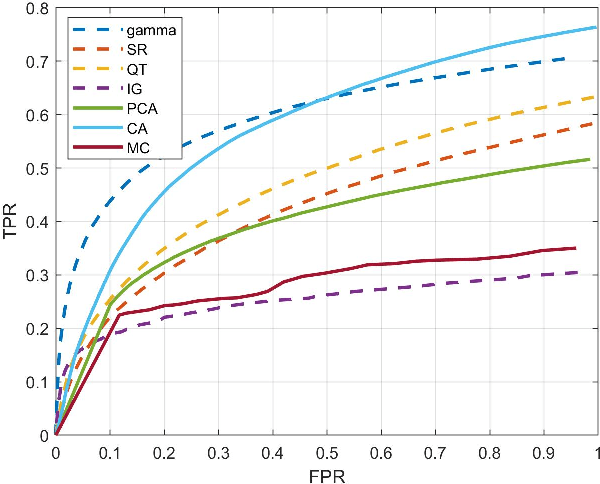
To fully understand interactions between marine hydrokinetic (MHK) equipment and marine animals, a fast and effective monitoring system is required to capture relevant information whenever underwater animals appear. A new automated underwater imaging system composed of LiDAR (Light Detection and Ranging) imaging hardware and a scene understanding software module named Unobtrusive Multistatic Serial LiDAR Imager (UMSLI) to supervise the presence of animals near turbines. UMSLI integrates the front end LiDAR hardware and a series of software modules to achieve image preprocessing, detection, tracking, segmentation and classification in a hierarchical manner.
Marine Animal Classification with Correntropy Loss Based Multi-view Learning
May 03, 2017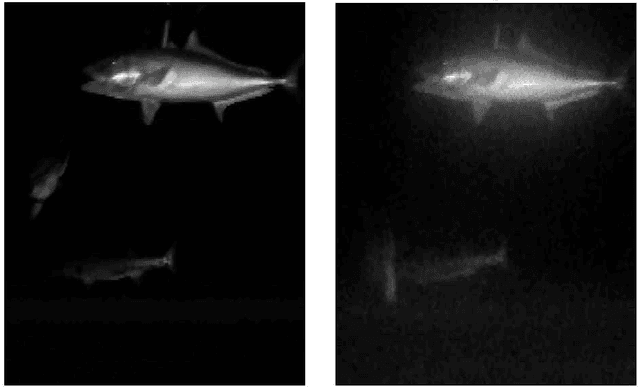
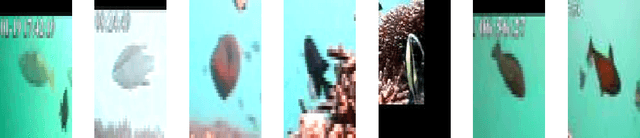
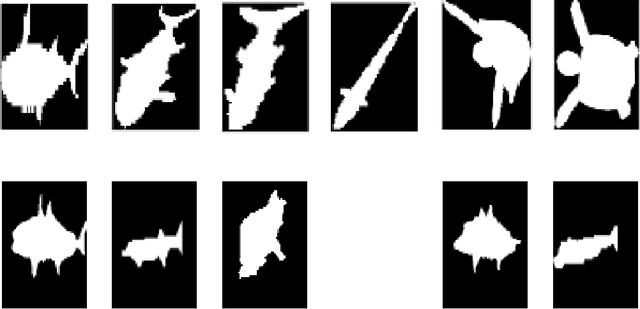
To analyze marine animals behavior, seasonal distribution and abundance, digital imagery can be acquired by visual or Lidar camera. Depending on the quantity and properties of acquired imagery, the animals are characterized as either features (shape, color, texture, etc.), or dissimilarity matrices derived from different shape analysis methods (shape context, internal distance shape context, etc.). For both cases, multi-view learning is critical in integrating more than one set of feature or dissimilarity matrix for higher classification accuracy. This paper adopts correntropy loss as cost function in multi-view learning, which has favorable statistical properties for rejecting noise. For the case of features, the correntropy loss-based multi-view learning and its entrywise variation are developed based on the multi-view intact space learning algorithm. For the case of dissimilarity matrices, the robust Euclidean embedding algorithm is extended to its multi-view form with the correntropy loss function. Results from simulated data and real-world marine animal imagery show that the proposed algorithms can effectively enhance classification rate, as well as suppress noise under different noise conditions.