 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvances in Self-Supervised Learning for Synthetic Aperture Sonar Data Processing, Classification, and Pattern Recognition
Aug 12, 2023



Synthetic Aperture Sonar (SAS) imaging has become a crucial technology for underwater exploration because of its unique ability to maintain resolution at increasing ranges, a characteristic absent in conventional sonar techniques. However, the effective application of deep learning to SAS data processing is often limited due to the scarcity of labeled data. To address this challenge, this paper proposes MoCo-SAS that leverages self-supervised learning (SSL) for SAS data processing, classification, and pattern recognition. The experimental results demonstrate that MoCo-SAS significantly outperforms traditional supervised learning methods, as evidenced by significant improvements observed in terms of the F1-score. These findings highlight the potential of SSL in advancing the state-of-the-art in SAS data processing, offering promising avenues for enhanced underwater object detection and classification.
Target Detection and Segmentation in Circular-Scan Synthetic-Aperture-Sonar Images using Semi-Supervised Convolutional Encoder-Decoders
Jan 10, 2021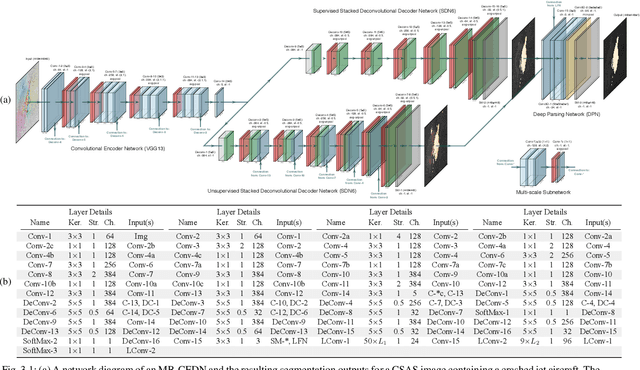
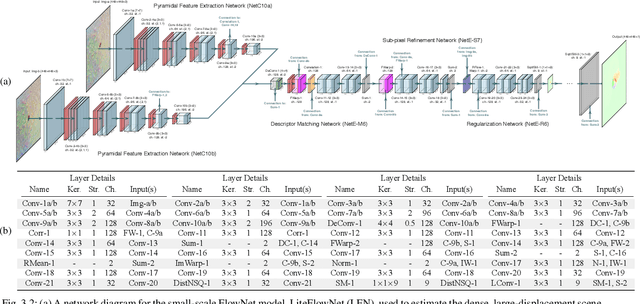
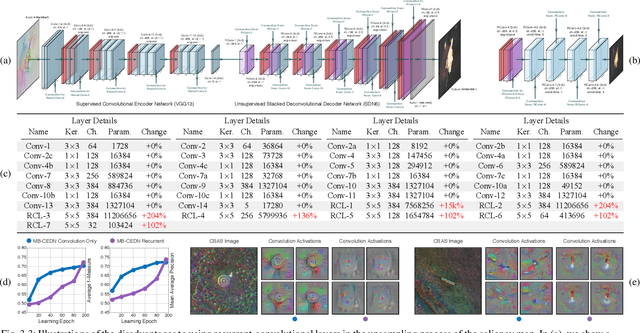
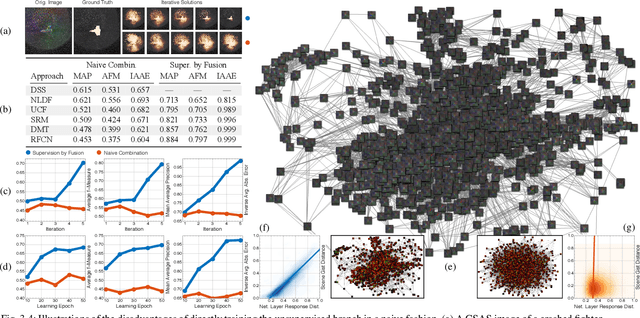
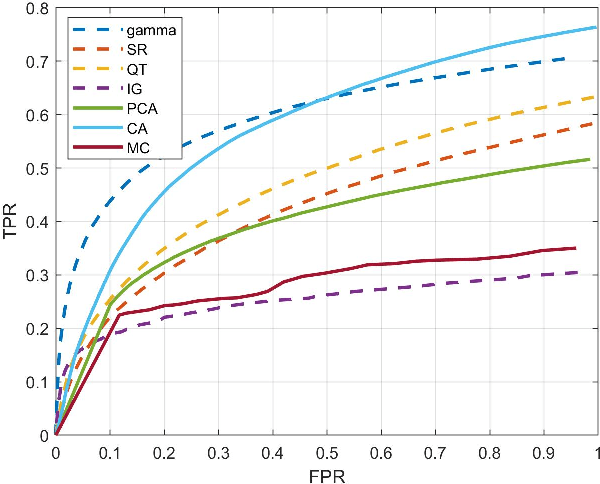
We propose a saliency-based, multi-target detection and segmentation framework for multi-aspect, semi-coherent imagery formed from circular-scan, synthetic-aperture sonar (CSAS). Our framework relies on a multi-branch, convolutional encoder-decoder network (MB-CEDN). The encoder portion extracts features from one or more CSAS images of the targets. These features are then split off and fed into multiple decoders that perform pixel-level classification on the extracted features to roughly mask the target in an unsupervised-trained manner and detect foreground and background pixels in a supervised-trained manner. Each of these target-detection estimates provide different perspectives as to what constitute a target. These opinions are cascaded into a deep-parsing network to model contextual and spatial constraints that help isolate targets better than either solution estimate alone. We evaluate our framework using real-world CSAS data with five broad target classes. Since we are the first to consider both CSAS target detection and segmentation, we adapt existing image and video-processing network topologies from the literature for comparative purposes. We show that our framework outperforms supervised deep networks. It greatly outperforms state-of-the-art unsupervised approaches for diverse target and seafloor types.
Algorithmic Design and Implementation of Unobtrusive Multistatic Serial LiDAR Image
Nov 08, 2019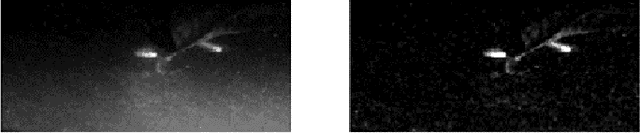
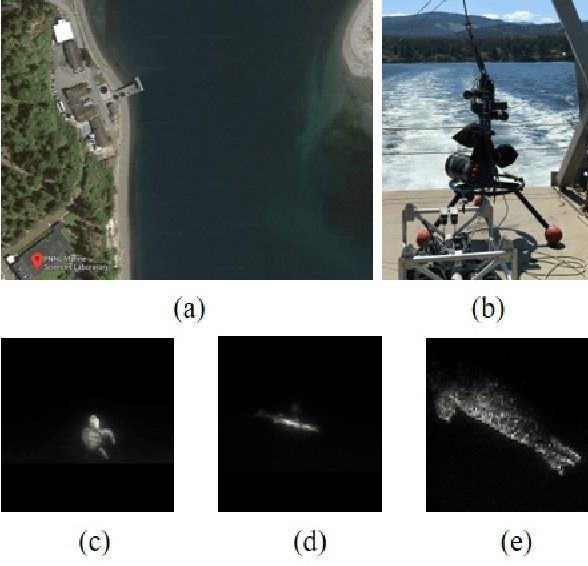
To fully understand interactions between marine hydrokinetic (MHK) equipment and marine animals, a fast and effective monitoring system is required to capture relevant information whenever underwater animals appear. A new automated underwater imaging system composed of LiDAR (Light Detection and Ranging) imaging hardware and a scene understanding software module named Unobtrusive Multistatic Serial LiDAR Imager (UMSLI) to supervise the presence of animals near turbines. UMSLI integrates the front end LiDAR hardware and a series of software modules to achieve image preprocessing, detection, tracking, segmentation and classification in a hierarchical manner.
Guided Policy Exploration for Markov Decision Processes using an Uncertainty-Based Value-of-Information Criterion
Feb 05, 2018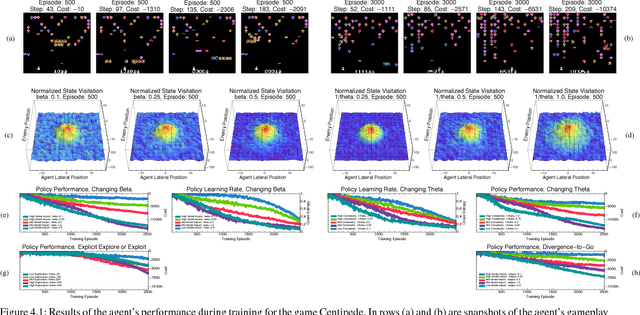
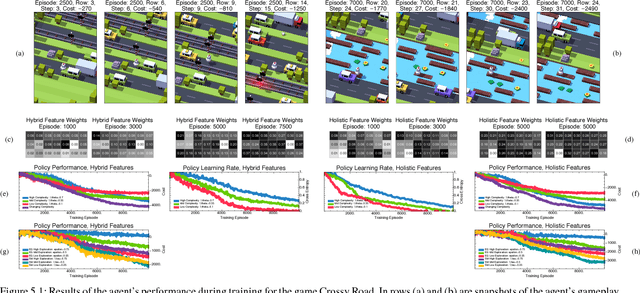
Reinforcement learning in environments with many action-state pairs is challenging. At issue is the number of episodes needed to thoroughly search the policy space. Most conventional heuristics address this search problem in a stochastic manner. This can leave large portions of the policy space unvisited during the early training stages. In this paper, we propose an uncertainty-based, information-theoretic approach for performing guided stochastic searches that more effectively cover the policy space. Our approach is based on the value of information, a criterion that provides the optimal trade-off between expected costs and the granularity of the search process. The value of information yields a stochastic routine for choosing actions during learning that can explore the policy space in a coarse to fine manner. We augment this criterion with a state-transition uncertainty factor, which guides the search process into previously unexplored regions of the policy space.