 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDementiaBank-Emotion: A Multi-Rater Emotion Annotation Corpus for Alzheimer's Disease Speech (Version 1.0)
Feb 04, 2026We present DementiaBank-Emotion, the first multi-rater emotion annotation corpus for Alzheimer's disease (AD) speech. Annotating 1,492 utterances from 108 speakers for Ekman's six basic emotions and neutral, we find that AD patients express significantly more non-neutral emotions (16.9%) than healthy controls (5.7%; p < .001). Exploratory acoustic analysis suggests a possible dissociation: control speakers showed substantial F0 modulation for sadness (Delta = -3.45 semitones from baseline), whereas AD speakers showed minimal change (Delta = +0.11 semitones; interaction p = .023), though this finding is based on limited samples (sadness: n=5 control, n=15 AD) and requires replication. Within AD speech, loudness differentiates emotion categories, indicating partially preserved emotion-prosody mappings. We release the corpus, annotation guidelines, and calibration workshop materials to support research on emotion recognition in clinical populations.
DEMENTIA-PLAN: An Agent-Based Framework for Multi-Knowledge Graph Retrieval-Augmented Generation in Dementia Care
Mar 26, 2025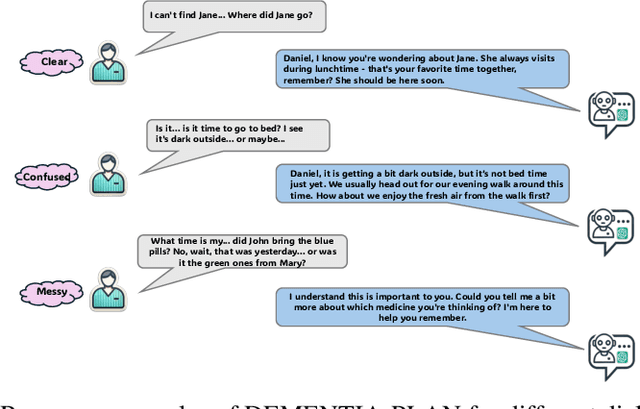
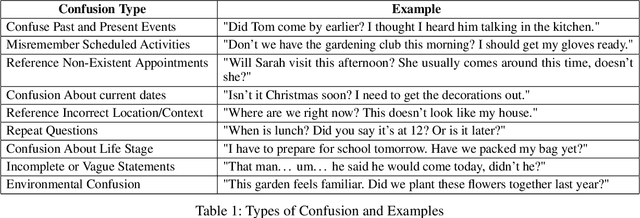
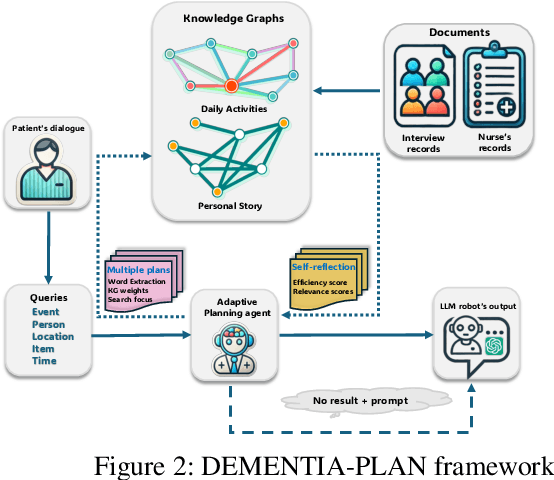
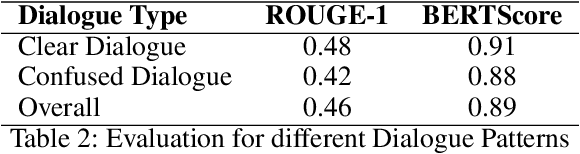
Mild-stage dementia patients primarily experience two critical symptoms: severe memory loss and emotional instability. To address these challenges, we propose DEMENTIA-PLAN, an innovative retrieval-augmented generation framework that leverages large language models to enhance conversational support. Our model employs a multiple knowledge graph architecture, integrating various dimensional knowledge representations including daily routine graphs and life memory graphs. Through this multi-graph architecture, DEMENTIA-PLAN comprehensively addresses both immediate care needs and facilitates deeper emotional resonance through personal memories, helping stabilize patient mood while providing reliable memory support. Our notable innovation is the self-reflection planning agent, which systematically coordinates knowledge retrieval and semantic integration across multiple knowledge graphs, while scoring retrieved content from daily routine and life memory graphs to dynamically adjust their retrieval weights for optimized response generation. DEMENTIA-PLAN represents a significant advancement in the clinical application of large language models for dementia care, bridging the gap between AI tools and caregivers interventions.
SAFE-TAXI: A Hierarchical Multi-UAS Safe Auto-Taxiing Framework with Runtime Safety Assurance and Conflict Resolution
Mar 06, 2025
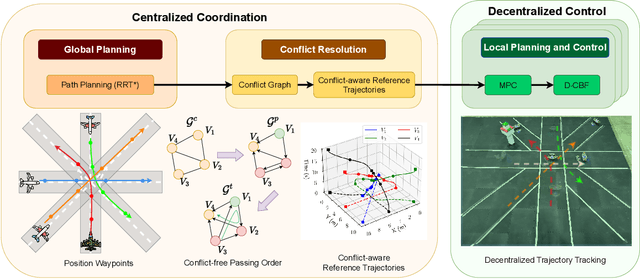
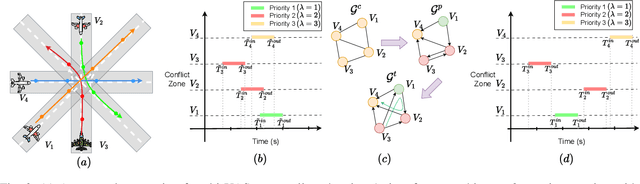
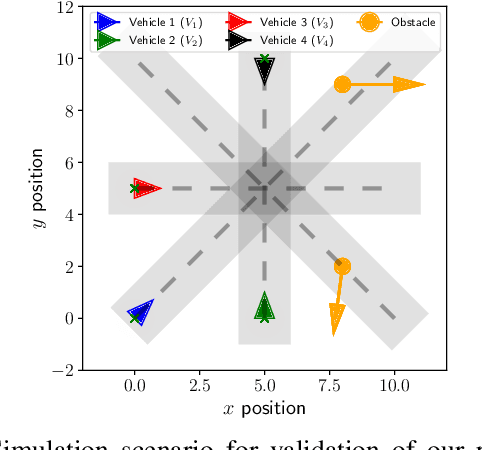
We present a hierarchical safe auto-taxiing framework to enhance the automated ground operations of multiple unmanned aircraft systems (multi-UAS). The auto-taxiing problem becomes particularly challenging due to (i) unknown disturbances, such as crosswind affecting the aircraft dynamics, (ii) taxiway incursions due to unplanned obstacles, and (iii) spatiotemporal conflicts at the intersections between multiple entry points in the taxiway. To address these issues, we propose a hierarchical framework, i.e., SAFE-TAXI, combining centralized spatiotemporal planning with decentralized MPC-CBF-based control to safely navigate the aircraft through the taxiway while avoiding intersection conflicts and unplanned obstacles (e.g., other aircraft or ground vehicles). Our proposed framework decouples the auto-taxiing problem temporally into conflict resolution and motion planning, respectively. Conflict resolution is handled in a centralized manner by computing conflict-aware reference trajectories for each aircraft. In contrast, safety assurance from unplanned obstacles is handled by an MPC-CBF-based controller implemented in a decentralized manner. We demonstrate the effectiveness of our proposed framework through numerical simulations and experimentally validate it using Night Vapor, a small-scale fixed-wing test platform.