 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAFE-TAXI: A Hierarchical Multi-UAS Safe Auto-Taxiing Framework with Runtime Safety Assurance and Conflict Resolution
Mar 06, 2025
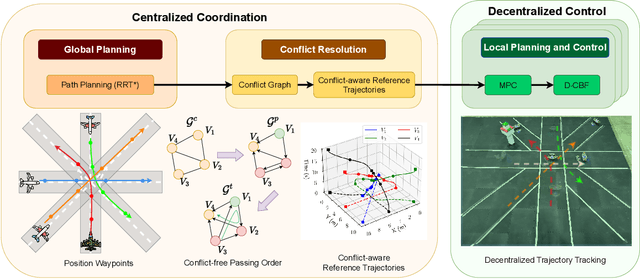
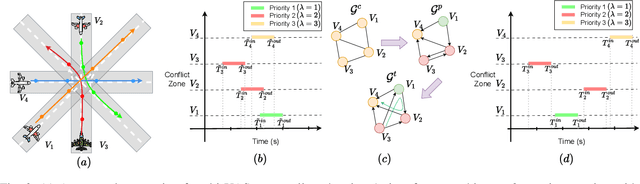
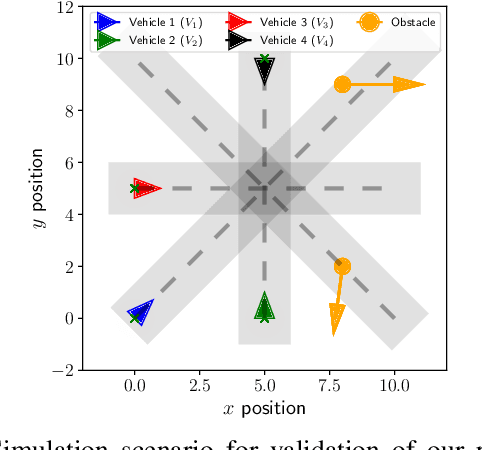
We present a hierarchical safe auto-taxiing framework to enhance the automated ground operations of multiple unmanned aircraft systems (multi-UAS). The auto-taxiing problem becomes particularly challenging due to (i) unknown disturbances, such as crosswind affecting the aircraft dynamics, (ii) taxiway incursions due to unplanned obstacles, and (iii) spatiotemporal conflicts at the intersections between multiple entry points in the taxiway. To address these issues, we propose a hierarchical framework, i.e., SAFE-TAXI, combining centralized spatiotemporal planning with decentralized MPC-CBF-based control to safely navigate the aircraft through the taxiway while avoiding intersection conflicts and unplanned obstacles (e.g., other aircraft or ground vehicles). Our proposed framework decouples the auto-taxiing problem temporally into conflict resolution and motion planning, respectively. Conflict resolution is handled in a centralized manner by computing conflict-aware reference trajectories for each aircraft. In contrast, safety assurance from unplanned obstacles is handled by an MPC-CBF-based controller implemented in a decentralized manner. We demonstrate the effectiveness of our proposed framework through numerical simulations and experimentally validate it using Night Vapor, a small-scale fixed-wing test platform.
Range-based Multi-Robot Integrity Monitoring Against Cyberattacks and Faults: An Anchor-Free Approach
Aug 20, 2024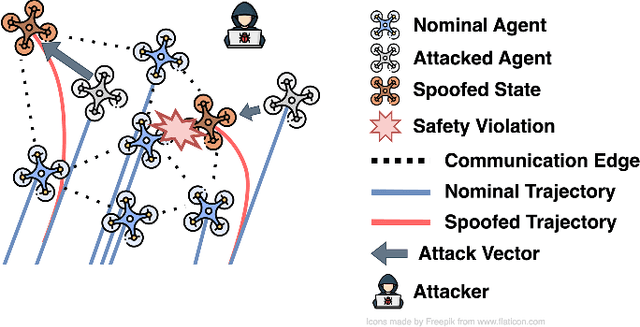
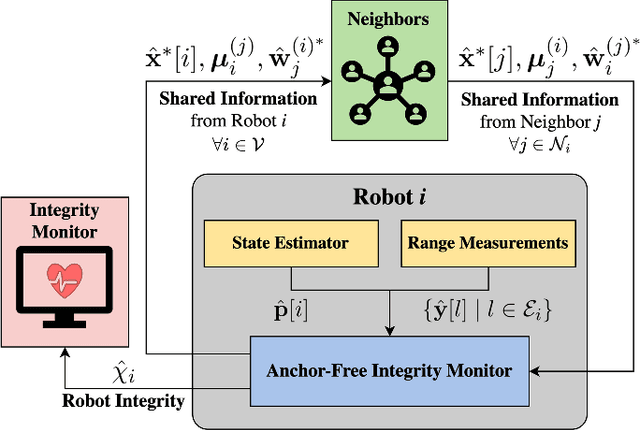
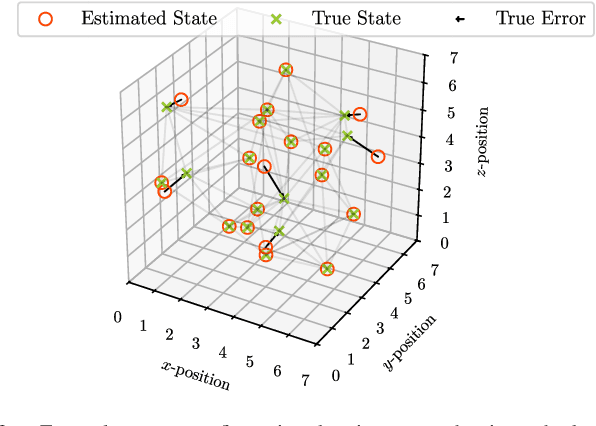
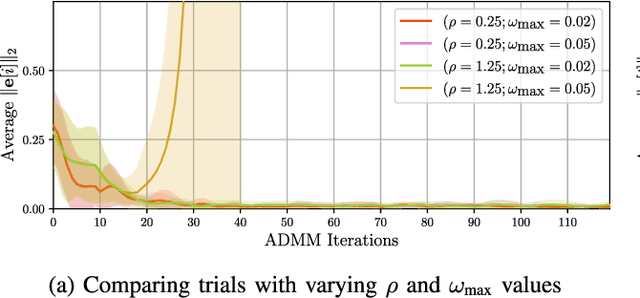
Coordination of multi-robot systems (MRSs) relies on efficient sensing and reliable communication among the robots. However, the sensors and communication channels of these robots are often vulnerable to cyberattacks and faults, which can disrupt their individual behavior and the overall objective of the MRS. In this work, we present a multi-robot integrity monitoring framework that utilizes inter-robot range measurements to (i) detect the presence of cyberattacks or faults affecting the MRS, (ii) identify the affected robot(s), and (iii) reconstruct the resulting localization error of these robot(s). The proposed iterative algorithm leverages sequential convex programming and alternating direction of multipliers method to enable real-time and distributed implementation. Our approach is validated using numerical simulations and demonstrated using PX4-SiTL in Gazebo on an MRS, where certain agents deviate from their desired position due to a GNSS spoofing attack. Furthermore, we demonstrate the scalability and interoperability of our algorithm through mixed-reality experiments by forming a heterogeneous MRS comprising real Crazyflie UAVs and virtual PX4-SiTL UAVs working in tandem.
MIXED-SENSE: A Mixed Reality Sensor Emulation Framework for Test and Evaluation of UAVs Against False Data Injection Attacks
Jul 12, 2024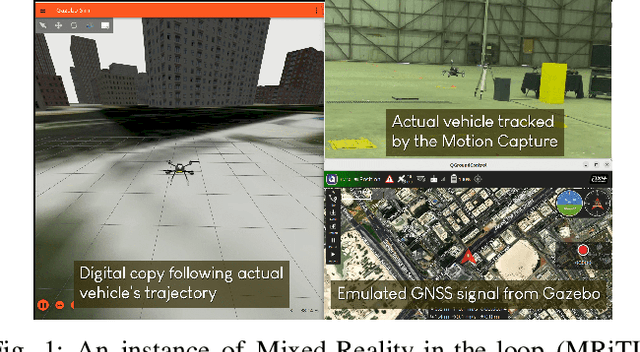
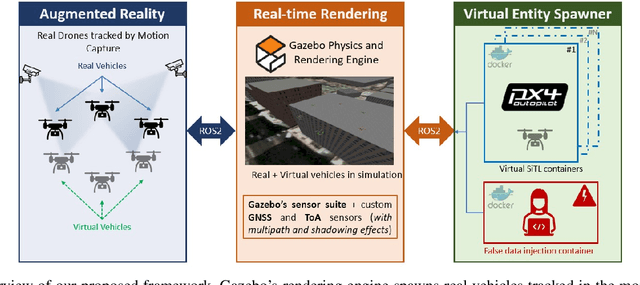
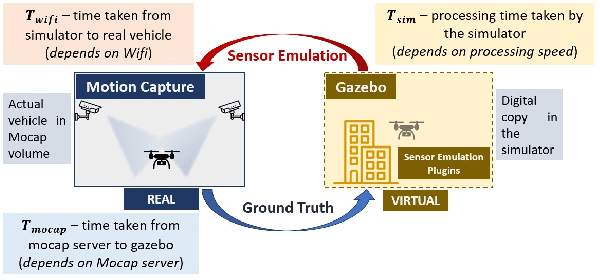
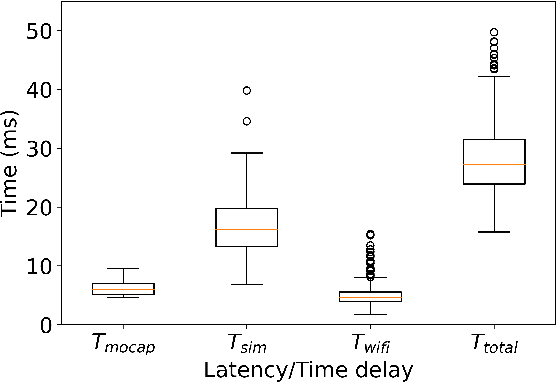
We present a high-fidelity Mixed Reality sensor emulation framework for testing and evaluating the resilience of Unmanned Aerial Vehicles (UAVs) against false data injection (FDI) attacks. The proposed approach can be utilized to assess the impact of FDI attacks, benchmark attack detector performance, and validate the effectiveness of mitigation/reconfiguration strategies in single-UAV and UAV swarm operations. Our Mixed Reality framework leverages high-fidelity simulations of Gazebo and a Motion Capture system to emulate proprioceptive (e.g., GNSS) and exteroceptive (e.g., camera) sensor measurements in real-time. We propose an empirical approach to faithfully recreate signal characteristics such as latency and noise in these measurements. Finally, we illustrate the efficacy of our proposed framework through a Mixed Reality experiment consisting of an emulated GNSS attack on an actual UAV, which (i) demonstrates the impact of false data injection attacks on GNSS measurements and (ii) validates a mitigation strategy utilizing a distributed camera network developed in our previous work. Our open-source implementation is available at \href{https://github.com/CogniPilot/mixed\_sense}{\texttt{https://github.com/CogniPilot/mixed\_sense}}