 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Tuned Language Models as Space Systems Controllers
Jan 28, 2025



Large language models (LLMs), or foundation models (FMs), are pretrained transformers that coherently complete sentences auto-regressively. In this paper, we show that LLMs can control simplified space systems after some additional training, called fine-tuning. We look at relatively small language models, ranging between 7 and 13 billion parameters. We focus on four problems: a three-dimensional spring toy problem, low-thrust orbit transfer, low-thrust cislunar control, and powered descent guidance. The fine-tuned LLMs are capable of controlling systems by generating sufficiently accurate outputs that are multi-dimensional vectors with up to 10 significant digits. We show that for several problems the amount of data required to perform fine-tuning is smaller than what is generally required of traditional deep neural networks (DNNs), and that fine-tuned LLMs are good at generalizing outside of the training dataset. Further, the same LLM can be fine-tuned with data from different problems, with only minor performance degradation with respect to LLMs trained for a single application. This work is intended as a first step towards the development of a general space systems controller.
Diffusion Policies for Generative Modeling of Spacecraft Trajectories
Jan 01, 2025Machine learning has demonstrated remarkable promise for solving the trajectory generation problem and in paving the way for online use of trajectory optimization for resource-constrained spacecraft. However, a key shortcoming in current machine learning-based methods for trajectory generation is that they require large datasets and even small changes to the original trajectory design requirements necessitate retraining new models to learn the parameter-to-solution mapping. In this work, we leverage compositional diffusion modeling to efficiently adapt out-of-distribution data and problem variations in a few-shot framework for 6 degree-of-freedom (DoF) powered descent trajectory generation. Unlike traditional deep learning methods that can only learn the underlying structure of one specific trajectory optimization problem, diffusion models are a powerful generative modeling framework that represents the solution as a probability density function (PDF) and this allows for the composition of PDFs encompassing a variety of trajectory design specifications and constraints. We demonstrate the capability of compositional diffusion models for inference-time 6 DoF minimum-fuel landing site selection and composable constraint representations. Using these samples as initial guesses for 6 DoF powered descent guidance enables dynamically feasible and computationally efficient trajectory generation.
Tight Constraint Prediction of Six-Degree-of-Freedom Transformer-based Powered Descent Guidance
Jan 01, 2025This work introduces Transformer-based Successive Convexification (T-SCvx), an extension of Transformer-based Powered Descent Guidance (T-PDG), generalizable for efficient six-degree-of-freedom (DoF) fuel-optimal powered descent trajectory generation. Our approach significantly enhances the sample efficiency and solution quality for nonconvex-powered descent guidance by employing a rotation invariant transformation of the sampled dataset. T-PDG was previously applied to the 3-DoF minimum fuel powered descent guidance problem, improving solution times by up to an order of magnitude compared to lossless convexification (LCvx). By learning to predict the set of tight or active constraints at the optimal control problem's solution, Transformer-based Successive Convexification (T-SCvx) creates the minimal reduced-size problem initialized with only the tight constraints, then uses the solution of this reduced problem to warm-start the direct optimization solver. 6-DoF powered descent guidance is known to be challenging to solve quickly and reliably due to the nonlinear and non-convex nature of the problem, the discretization scheme heavily influencing solution validity, and reference trajectory initialization determining algorithm convergence or divergence. Our contributions in this work address these challenges by extending T-PDG to learn the set of tight constraints for the successive convexification (SCvx) formulation of the 6-DoF powered descent guidance problem. In addition to reducing the problem size, feasible and locally optimal reference trajectories are also learned to facilitate convergence from the initial guess. T-SCvx enables onboard computation of real-time guidance trajectories, demonstrated by a 6-DoF Mars powered landing application problem.
Compositional Diffusion Models for Powered Descent Trajectory Generation with Flexible Constraints
Oct 05, 2024

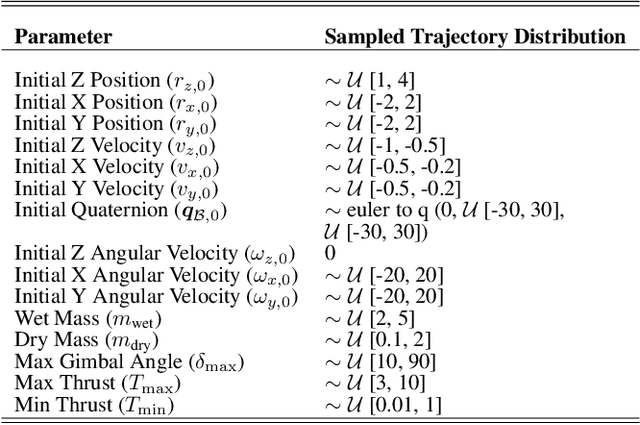

This work introduces TrajDiffuser, a compositional diffusion-based flexible and concurrent trajectory generator for 6 degrees of freedom powered descent guidance. TrajDiffuser is a statistical model that learns the multi-modal distributions of a dataset of simulated optimal trajectories, each subject to only one or few constraints that may vary for different trajectories. During inference, the trajectory is generated simultaneously over time, providing stable long-horizon planning, and constraints can be composed together, increasing the model's generalizability and decreasing the training data required. The generated trajectory is then used to initialize an optimizer, increasing its robustness and speed.
Enhancing Solar Driver Forecasting with Multivariate Transformers
Jun 22, 2024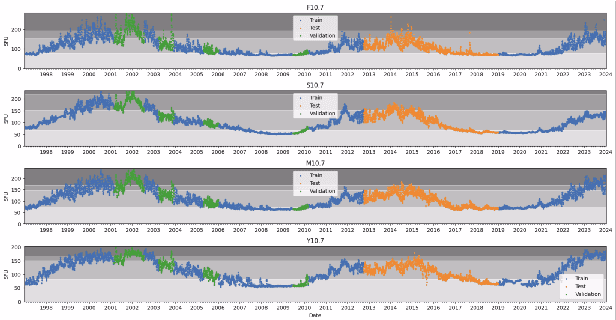

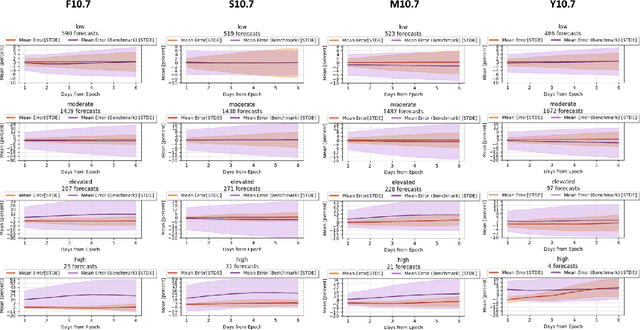
In this work, we develop a comprehensive framework for F10.7, S10.7, M10.7, and Y10.7 solar driver forecasting with a time series Transformer (PatchTST). To ensure an equal representation of high and low levels of solar activity, we construct a custom loss function to weight samples based on the distance between the solar driver's historical distribution and the training set. The solar driver forecasting framework includes an 18-day lookback window and forecasts 6 days into the future. When benchmarked against the Space Environment Technologies (SET) dataset, our model consistently produces forecasts with a lower standard mean error in nearly all cases, with improved prediction accuracy during periods of high solar activity. All the code is available on Github https://github.com/ARCLab-MIT/sw-driver-forecaster.
Constraint-Informed Learning for Warm Starting Trajectory Optimization
Dec 21, 2023Future spacecraft and surface robotic missions require increasingly capable autonomy stacks for exploring challenging and unstructured domains and trajectory optimization will be a cornerstone of such autonomy stacks. However, the nonlinear optimization solvers required remain too slow for use on relatively resource constrained flight-grade computers. In this work, we turn towards amortized optimization, a learning-based technique for accelerating optimization run times, and present TOAST: Trajectory Optimization with Merit Function Warm Starts. Offline, using data collected from a simulation, we train a neural network to learn a mapping to the full primal and dual solutions given the problem parameters. Crucially, we build upon recent results from decision-focused learning and present a set of decision-focused loss functions using the notion of merit functions for optimization problems. We show that training networks with such constraint-informed losses can better encode the structure of the trajectory optimization problem and jointly learn to reconstruct the primal-dual solution while also yielding improved constraint satisfaction. Through numerical experiments on a Lunar rover problem, we demonstrate that TOAST outperforms benchmark approaches in terms of both computation times and network prediction constraint satisfaction.
Improving Computational Efficiency for Powered Descent Guidance via Transformer-based Tight Constraint Prediction
Nov 09, 2023In this work, we present Transformer-based Powered Descent Guidance (T-PDG), a scalable algorithm for reducing the computational complexity of the direct optimization formulation of the spacecraft powered descent guidance problem. T-PDG uses data from prior runs of trajectory optimization algorithms to train a transformer neural network, which accurately predicts the relationship between problem parameters and the globally optimal solution for the powered descent guidance problem. The solution is encoded as the set of tight constraints corresponding to the constrained minimum-cost trajectory and the optimal final time of landing. By leveraging the attention mechanism of transformer neural networks, large sequences of time series data can be accurately predicted when given only the spacecraft state and landing site parameters. When applied to the real problem of Mars powered descent guidance, T-PDG reduces the time for computing the 3 degree of freedom fuel-optimal trajectory, when compared to lossless convexification, from an order of 1-8 seconds to less than 500 milliseconds. A safe and optimal solution is guaranteed by including a feasibility check in T-PDG before returning the final trajectory.
Transformer-based Atmospheric Density Forecasting
Oct 25, 2023As the peak of the solar cycle approaches in 2025 and the ability of a single geomagnetic storm to significantly alter the orbit of Resident Space Objects (RSOs), techniques for atmospheric density forecasting are vital for space situational awareness. While linear data-driven methods, such as dynamic mode decomposition with control (DMDc), have been used previously for forecasting atmospheric density, deep learning-based forecasting has the ability to capture nonlinearities in data. By learning multiple layer weights from historical atmospheric density data, long-term dependencies in the dataset are captured in the mapping between the current atmospheric density state and control input to the atmospheric density state at the next timestep. This work improves upon previous linear propagation methods for atmospheric density forecasting, by developing a nonlinear transformer-based architecture for atmospheric density forecasting. Empirical NRLMSISE-00 and JB2008, as well as physics-based TIEGCM atmospheric density models are compared for forecasting with DMDc and with the transformer-based propagator.