 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamSat: Towards a General 3D Model for Novel View Synthesis of Space Objects
Oct 07, 2024


Novel view synthesis (NVS) enables to generate new images of a scene or convert a set of 2D images into a comprehensive 3D model. In the context of Space Domain Awareness, since space is becoming increasingly congested, NVS can accurately map space objects and debris, improving the safety and efficiency of space operations. Similarly, in Rendezvous and Proximity Operations missions, 3D models can provide details about a target object's shape, size, and orientation, allowing for better planning and prediction of the target's behavior. In this work, we explore the generalization abilities of these reconstruction techniques, aiming to avoid the necessity of retraining for each new scene, by presenting a novel approach to 3D spacecraft reconstruction from single-view images, DreamSat, by fine-tuning the Zero123 XL, a state-of-the-art single-view reconstruction model, on a high-quality dataset of 190 high-quality spacecraft models and integrating it into the DreamGaussian framework. We demonstrate consistent improvements in reconstruction quality across multiple metrics, including Contrastive Language-Image Pretraining (CLIP) score (+0.33%), Peak Signal-to-Noise Ratio (PSNR) (+2.53%), Structural Similarity Index (SSIM) (+2.38%), and Learned Perceptual Image Patch Similarity (LPIPS) (+0.16%) on a test set of 30 previously unseen spacecraft images. Our method addresses the lack of domain-specific 3D reconstruction tools in the space industry by leveraging state-of-the-art diffusion models and 3D Gaussian splatting techniques. This approach maintains the efficiency of the DreamGaussian framework while enhancing the accuracy and detail of spacecraft reconstructions. The code for this work can be accessed on GitHub (https://github.com/ARCLab-MIT/space-nvs).
Enhancing Solar Driver Forecasting with Multivariate Transformers
Jun 22, 2024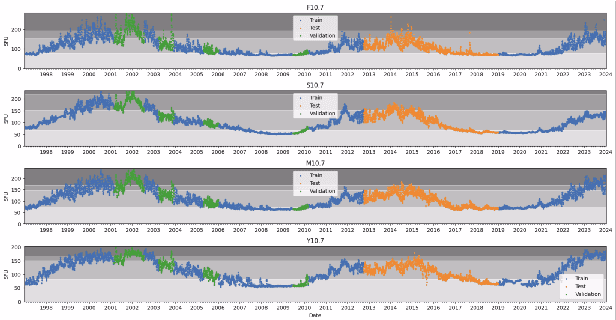

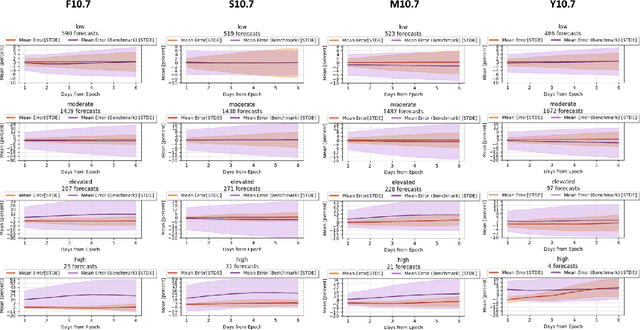
In this work, we develop a comprehensive framework for F10.7, S10.7, M10.7, and Y10.7 solar driver forecasting with a time series Transformer (PatchTST). To ensure an equal representation of high and low levels of solar activity, we construct a custom loss function to weight samples based on the distance between the solar driver's historical distribution and the training set. The solar driver forecasting framework includes an 18-day lookback window and forecasts 6 days into the future. When benchmarked against the Space Environment Technologies (SET) dataset, our model consistently produces forecasts with a lower standard mean error in nearly all cases, with improved prediction accuracy during periods of high solar activity. All the code is available on Github https://github.com/ARCLab-MIT/sw-driver-forecaster.
Language Models are Spacecraft Operators
Mar 30, 2024Recent trends are emerging in the use of Large Language Models (LLMs) as autonomous agents that take actions based on the content of the user text prompts. We intend to apply these concepts to the field of Guidance, Navigation, and Control in space, enabling LLMs to have a significant role in the decision-making process for autonomous satellite operations. As a first step towards this goal, we have developed a pure LLM-based solution for the Kerbal Space Program Differential Games (KSPDG) challenge, a public software design competition where participants create autonomous agents for maneuvering satellites involved in non-cooperative space operations, running on the KSP game engine. Our approach leverages prompt engineering, few-shot prompting, and fine-tuning techniques to create an effective LLM-based agent that ranked 2nd in the competition. To the best of our knowledge, this work pioneers the integration of LLM agents into space research. Code is available at https://github.com/ARCLab-MIT/kspdg.
Towards a Machine Learning-Based Approach to Predict Space Object Density Distributions
Jan 08, 2024With the rapid increase in the number of Anthropogenic Space Objects (ASOs), Low Earth Orbit (LEO) is facing significant congestion, thereby posing challenges to space operators and risking the viability of the space environment for varied uses. Current models for examining this evolution, while detailed, are computationally demanding. To address these issues, we propose a novel machine learning-based model, as an extension of the MIT Orbital Capacity Tool (MOCAT). This advanced model is designed to accelerate the propagation of ASO density distributions, and it is trained on hundreds of simulations generated by an established and accurate model of the space environment evolution. We study how different deep learning-based solutions can potentially be good candidates for ASO propagation and manage the high-dimensionality of the data. To assess the model's capabilities, we conduct experiments in long term forecasting scenarios (around 100 years), analyze how and why the performance degrades over time, and discuss potential solutions to make this solution better.
Transformer-based Atmospheric Density Forecasting
Oct 25, 2023As the peak of the solar cycle approaches in 2025 and the ability of a single geomagnetic storm to significantly alter the orbit of Resident Space Objects (RSOs), techniques for atmospheric density forecasting are vital for space situational awareness. While linear data-driven methods, such as dynamic mode decomposition with control (DMDc), have been used previously for forecasting atmospheric density, deep learning-based forecasting has the ability to capture nonlinearities in data. By learning multiple layer weights from historical atmospheric density data, long-term dependencies in the dataset are captured in the mapping between the current atmospheric density state and control input to the atmospheric density state at the next timestep. This work improves upon previous linear propagation methods for atmospheric density forecasting, by developing a nonlinear transformer-based architecture for atmospheric density forecasting. Empirical NRLMSISE-00 and JB2008, as well as physics-based TIEGCM atmospheric density models are compared for forecasting with DMDc and with the transformer-based propagator.