 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Tuned Language Models as Space Systems Controllers
Jan 28, 2025



Large language models (LLMs), or foundation models (FMs), are pretrained transformers that coherently complete sentences auto-regressively. In this paper, we show that LLMs can control simplified space systems after some additional training, called fine-tuning. We look at relatively small language models, ranging between 7 and 13 billion parameters. We focus on four problems: a three-dimensional spring toy problem, low-thrust orbit transfer, low-thrust cislunar control, and powered descent guidance. The fine-tuned LLMs are capable of controlling systems by generating sufficiently accurate outputs that are multi-dimensional vectors with up to 10 significant digits. We show that for several problems the amount of data required to perform fine-tuning is smaller than what is generally required of traditional deep neural networks (DNNs), and that fine-tuned LLMs are good at generalizing outside of the training dataset. Further, the same LLM can be fine-tuned with data from different problems, with only minor performance degradation with respect to LLMs trained for a single application. This work is intended as a first step towards the development of a general space systems controller.
Learning Topometric Semantic Maps from Occupancy Grids
Jan 10, 2020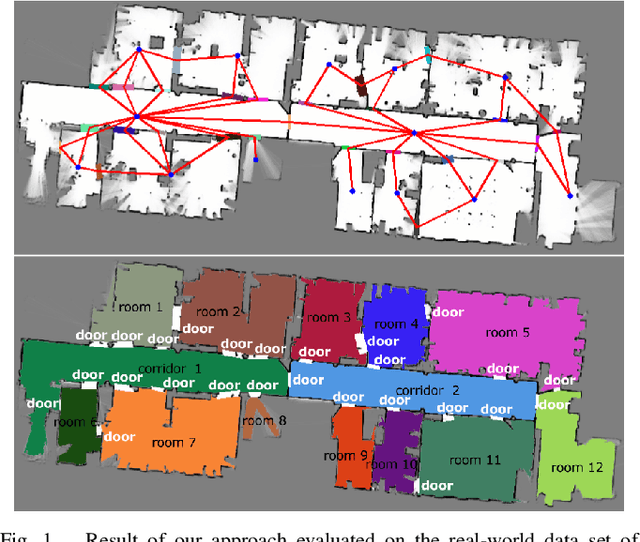
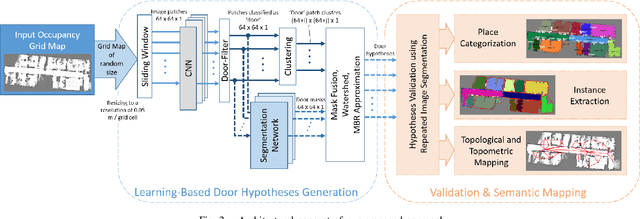
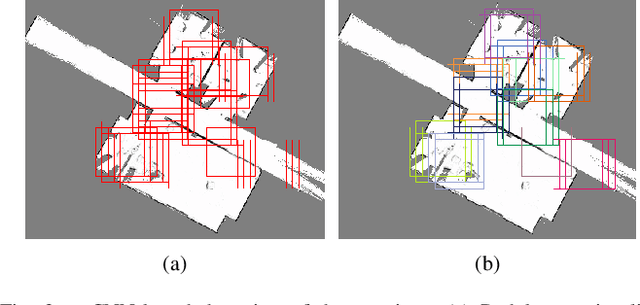
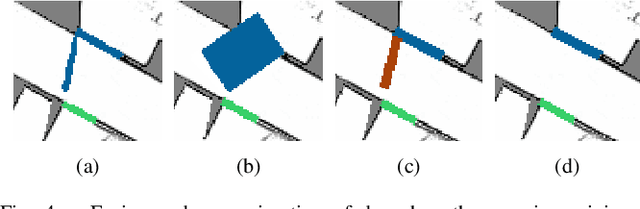
Today's mobile robots are expected to operate in complex environments they share with humans. To allow intuitive human-robot collaboration, robots require a human-like understanding of their surroundings in terms of semantically classified instances. In this paper, we propose a new approach for deriving such instance-based semantic maps purely from occupancy grids. We employ a combination of deep learning techniques to detect, segment and extract door hypotheses from a random-sized map. The extraction is followed by a post-processing chain to further increase the accuracy of our approach, as well as place categorization for the three classes room, door and corridor. All detected and classified entities are described as instances specified in a common coordinate system, while a topological map is derived to capture their spatial links. To train our two neural networks used for detection and map segmentation, we contribute a simulator that automatically creates and annotates the required training data. We further provide insight into which features are learned to detect doorways, and how the simulated training data can be augmented to train networks for the direct application on real-world grid maps. We evaluate our approach on several publicly available real-world data sets. Even though the used networks are solely trained on simulated data, our approach demonstrates high robustness and effectiveness in various real-world indoor environments.
Estimating parameters of nonlinear systems using the elitist particle filter based on evolutionary strategies
May 25, 2016



In this article, we present the elitist particle filter based on evolutionary strategies (EPFES) as an efficient approach for nonlinear system identification. The EPFES is derived from the frequently-employed state-space model, where the relevant information of the nonlinear system is captured by an unknown state vector. Similar to classical particle filtering, the EPFES consists of a set of particles and respective weights which represent different realizations of the latent state vector and their likelihood of being the solution of the optimization problem. As main innovation, the EPFES includes an evolutionary elitist-particle selection which combines long-term information with instantaneous sampling from an approximated continuous posterior distribution. In this article, we propose two advancements of the previously-published elitist-particle selection process. Further, the EPFES is shown to be a generalization of the widely-used Gaussian particle filter and thus evaluated with respect to the latter for two completely different scenarios: First, we consider the so-called univariate nonstationary growth model with time-variant latent state variable, where the evolutionary selection of elitist particles is evaluated for non-recursively calculated particle weights. Second, the problem of nonlinear acoustic echo cancellation is addressed in a simulated scenario with speech as input signal: By using long-term fitness measures, we highlight the efficacy of the well-generalizing EPFES in estimating the nonlinear system even for large search spaces. Finally, we illustrate similarities between the EPFES and evolutionary algorithms to outline future improvements by fusing the achievements of both fields of research.