 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-Tuned Language Models as Space Systems Controllers
Jan 28, 2025



Large language models (LLMs), or foundation models (FMs), are pretrained transformers that coherently complete sentences auto-regressively. In this paper, we show that LLMs can control simplified space systems after some additional training, called fine-tuning. We look at relatively small language models, ranging between 7 and 13 billion parameters. We focus on four problems: a three-dimensional spring toy problem, low-thrust orbit transfer, low-thrust cislunar control, and powered descent guidance. The fine-tuned LLMs are capable of controlling systems by generating sufficiently accurate outputs that are multi-dimensional vectors with up to 10 significant digits. We show that for several problems the amount of data required to perform fine-tuning is smaller than what is generally required of traditional deep neural networks (DNNs), and that fine-tuned LLMs are good at generalizing outside of the training dataset. Further, the same LLM can be fine-tuned with data from different problems, with only minor performance degradation with respect to LLMs trained for a single application. This work is intended as a first step towards the development of a general space systems controller.
Visual Language Models as Operator Agents in the Space Domain
Jan 14, 2025

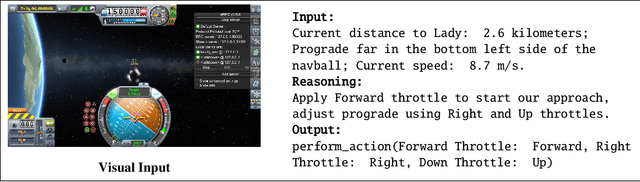

This paper explores the application of Vision-Language Models (VLMs) as operator agents in the space domain, focusing on both software and hardware operational paradigms. Building on advances in Large Language Models (LLMs) and their multimodal extensions, we investigate how VLMs can enhance autonomous control and decision-making in space missions. In the software context, we employ VLMs within the Kerbal Space Program Differential Games (KSPDG) simulation environment, enabling the agent to interpret visual screenshots of the graphical user interface to perform complex orbital maneuvers. In the hardware context, we integrate VLMs with robotic systems equipped with cameras to inspect and diagnose physical space objects, such as satellites. Our results demonstrate that VLMs can effectively process visual and textual data to generate contextually appropriate actions, competing with traditional methods and non-multimodal LLMs in simulation tasks, and showing promise in real-world applications.
A Bayesian Approach to Low-Thrust Maneuvering Spacecraft Tracking
Oct 23, 2024



Bayesian estimation with an explicit transitional prior is required for a tracking algorithm to be embedded in most multi-target tracking frameworks. This paper describes a novel approach capable of tracking maneuvering spacecraft with an explicit transitional prior and in a Bayesian framework, with fewer than two observations passes per day. The algorithm samples thrust profiles according to a multivariate Laplace distribution. It is shown that multivariate Laplace distributions are particularly suited to track maneuvering spacecraft, leading to a log probability function that is almost linear with the thrust. Principles from rare event simulation theory are used to propagate the tails of the distribution. Fast propagation is enabled by multi-fidelity methods. Because of the diffuse transitional prior, a novel k-nearest neighbor-based ensemble Gaussian mixture filter is developed and used.The method allows Bayesian tracking of maneuvering spacecraft for several scenarios with fewer than two measurement passes per day, and with a mismatch between the true and expected thrust magnitude of up to a factor of 200. The validity domain and statistical significance of the method are shown by simulation through several Monte Carlo trials in different scenarios and with different filter settings.
Compositional Diffusion Models for Powered Descent Trajectory Generation with Flexible Constraints
Oct 05, 2024


This work introduces TrajDiffuser, a compositional diffusion-based flexible and concurrent trajectory generator for 6 degrees of freedom powered descent guidance. TrajDiffuser is a statistical model that learns the multi-modal distributions of a dataset of simulated optimal trajectories, each subject to only one or few constraints that may vary for different trajectories. During inference, the trajectory is generated simultaneously over time, providing stable long-horizon planning, and constraints can be composed together, increasing the model's generalizability and decreasing the training data required. The generated trajectory is then used to initialize an optimizer, increasing its robustness and speed.