 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bayesian Approach to Low-Thrust Maneuvering Spacecraft Tracking
Oct 23, 2024



Bayesian estimation with an explicit transitional prior is required for a tracking algorithm to be embedded in most multi-target tracking frameworks. This paper describes a novel approach capable of tracking maneuvering spacecraft with an explicit transitional prior and in a Bayesian framework, with fewer than two observations passes per day. The algorithm samples thrust profiles according to a multivariate Laplace distribution. It is shown that multivariate Laplace distributions are particularly suited to track maneuvering spacecraft, leading to a log probability function that is almost linear with the thrust. Principles from rare event simulation theory are used to propagate the tails of the distribution. Fast propagation is enabled by multi-fidelity methods. Because of the diffuse transitional prior, a novel k-nearest neighbor-based ensemble Gaussian mixture filter is developed and used.The method allows Bayesian tracking of maneuvering spacecraft for several scenarios with fewer than two measurement passes per day, and with a mismatch between the true and expected thrust magnitude of up to a factor of 200. The validity domain and statistical significance of the method are shown by simulation through several Monte Carlo trials in different scenarios and with different filter settings.
Information-Driven Search and Track of Novel Space Objects
Oct 03, 2024



Space surveillance depends on efficiently directing sensor resources to maintain custody of known catalog objects. However, it remains unclear how to best utilize these resources to rapidly search for and track newly detected space objects. Provided a novel measurement, a search set can be instantiated through admissible region constraints to inform follow-up observations. In lacking well-constrained bounds, this set rapidly spreads in the along-track direction, growing much larger than a follow-up sensor's finite field of view. Moreover, the number of novel objects may be uncertain, and follow-up observations are most commonly corrupted by false positives from known catalog objects and missed detections. In this work, we address these challenges through the introduction of a joint sensor control and multi-target tracking approach. The search set associated to a novel measurement is represented by a Cardinalized Probability Hypothesis Density (CPHD), which jointly tracks the state uncertainty associated to a set of objects and a probability mass function for the true target number. In follow-up sensor scans, the information contained in an empty measurement set, and returns from both novel objects and known catalog objects is succinctly captured through this paradigm. To maximize the utility of a follow-up sensor, we introduce an information-driven sensor control approach for steering the instrument. Our methods are tested on two relevant test cases and we provide a comparative analysis with current naive tasking strategies.
Information-Based Trajectory Planning for Autonomous Absolute Tracking in Cislunar Space
Aug 30, 2024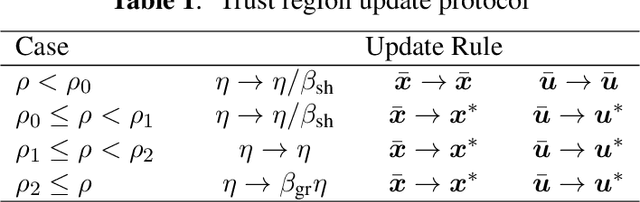
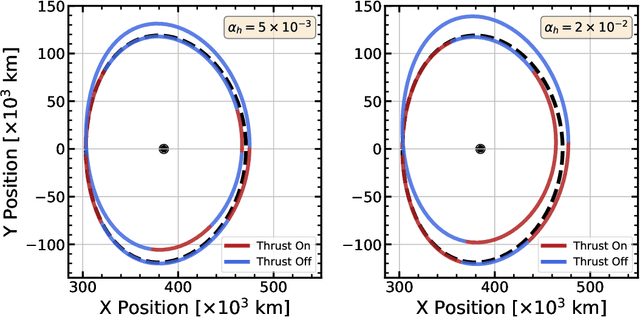

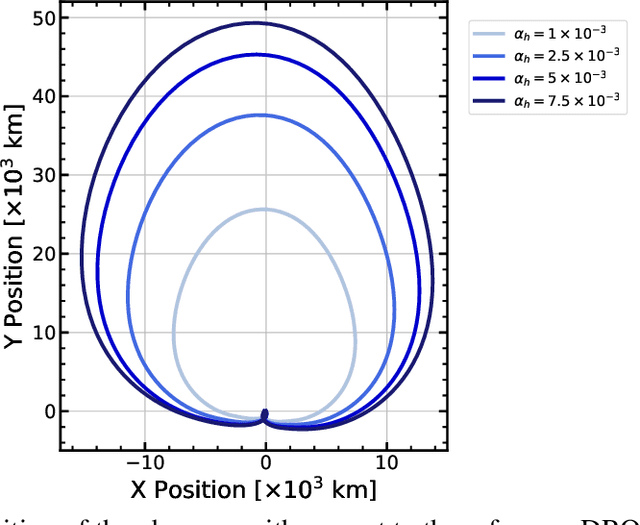
The resurgence of lunar operations requires advancements in cislunar navigation and Space Situational Awareness (SSA). Challenges associated to these tasks have created an interest in autonomous planning, navigation, and tracking technologies that operate with little ground-based intervention. This research introduces a trajectory planning tool for a low-thrust mobile observer, aimed at maximizing navigation and tracking performance with satellite-to-satellite relative measurements. We formulate an expression for the information gathered over an observation period based on the mutual information between augmented observer/target states and the associated measurement set collected. We then develop an optimal trajectory design problem for a mobile observer, balancing information gain and control effort, and solve this problem with a Sequential Convex Programming (SCP) approach. The developed methods are demonstrated in scenarios involving spacecraft in the cislunar regime, demonstrating the potential for improved autonomous navigation and tracking.
Direct Exoplanet Detection Using Deep Convolutional Image Reconstruction (ConStruct): A New Algorithm for Post-Processing High-Contrast Images
Dec 06, 2023



We present a novel machine-learning approach for detecting faint point sources in high-contrast adaptive optics imaging datasets. The most widely used algorithms for primary subtraction aim to decouple bright stellar speckle noise from planetary signatures by subtracting an approximation of the temporally evolving stellar noise from each frame in an imaging sequence. Our approach aims to improve the stellar noise approximation and increase the planet detection sensitivity by leveraging deep learning in a novel direct imaging post-processing algorithm. We show that a convolutional autoencoder neural network, trained on an extensive reference library of real imaging sequences, accurately reconstructs the stellar speckle noise at the location of a potential planet signal. This tool is used in a post-processing algorithm we call Direct Exoplanet Detection with Convolutional Image Reconstruction, or ConStruct. The reliability and sensitivity of ConStruct are assessed using real Keck/NIRC2 angular differential imaging datasets. Of the 30 unique point sources we examine, ConStruct yields a higher S/N than traditional PCA-based processing for 67$\%$ of the cases and improves the relative contrast by up to a factor of 2.6. This work demonstrates the value and potential of deep learning to take advantage of a diverse reference library of point spread function realizations to improve direct imaging post-processing. ConStruct and its future improvements may be particularly useful as tools for post-processing high-contrast images from the James Webb Space Telescope and extreme adaptive optics instruments, both for the current generation and those being designed for the upcoming 30 meter-class telescopes.