 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysical Reservoir Computing in Hook-Shaped Rover Wheel Spokes for Real-Time Terrain Identification
Apr 17, 2025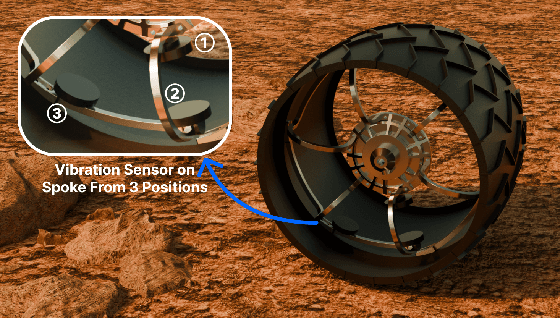
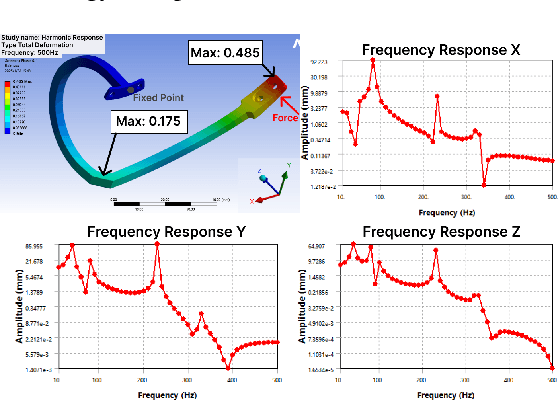
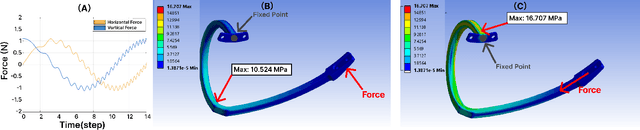
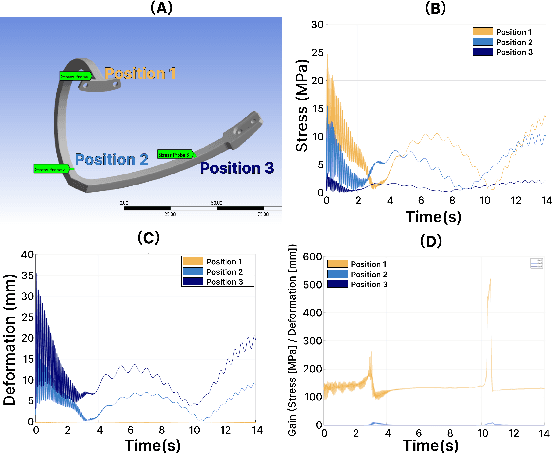
Effective terrain detection in unknown environments is crucial for safe and efficient robotic navigation. Traditional methods often rely on computationally intensive data processing, requiring extensive onboard computational capacity and limiting real-time performance for rovers. This study presents a novel approach that combines physical reservoir computing with piezoelectric sensors embedded in rover wheel spokes for real-time terrain identification. By leveraging wheel dynamics, terrain-induced vibrations are transformed into high-dimensional features for machine learning-based classification. Experimental results show that strategically placing three sensors on the wheel spokes achieves 90$\%$ classification accuracy, which demonstrates the accuracy and feasibility of the proposed method. The experiment results also showed that the system can effectively distinguish known terrains and identify unknown terrains by analyzing their similarity to learned categories. This method provides a robust, low-power framework for real-time terrain classification and roughness estimation in unstructured environments, enhancing rover autonomy and adaptability.
Towards the Neuromorphic Computing for Offroad Robot Environment Perception and Navigation
May 05, 2023
My research objective is to explicitly bridge the gap between high computational performance and low power dissipation of robot on-board hardware by designing a bio-inspired tapered whisker neuromorphic computing (also called reservoir computing) system for offroad robot environment perception and navigation, that centres the interaction between a robot's body and its environment. Mobile robots performing tasks in unknown environments need to traverse a variety of complex terrains, and they must be able to reliably and quickly identify and characterize these terrains to avoid getting into potentially challenging or catastrophic circumstances. To solve this problem, I drew inspiration from animals like rats and seals, just relying on whiskers to perceive surroundings information and survive in dark and narrow environments. Additionally, I looked to the human cochlear which can separate different frequencies of sound. Based on these insights, my work addresses this need by exploring the physical whisker-based reservoir computing for quick and cost-efficient mobile robots environment perception and navigation step by step. This research could help us understand how the compliance of the biological counterparts helps robots to dynamically interact with the environment and provides a new solution compared with current methods for robot environment perception and navigation with limited computational resources, such as Mars.
Study on Soft Robotic Pinniped Locomotion
Apr 14, 2023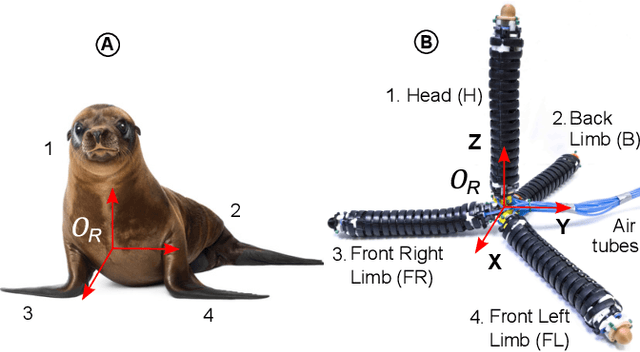
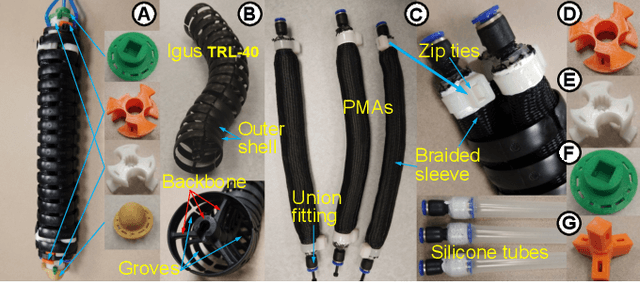
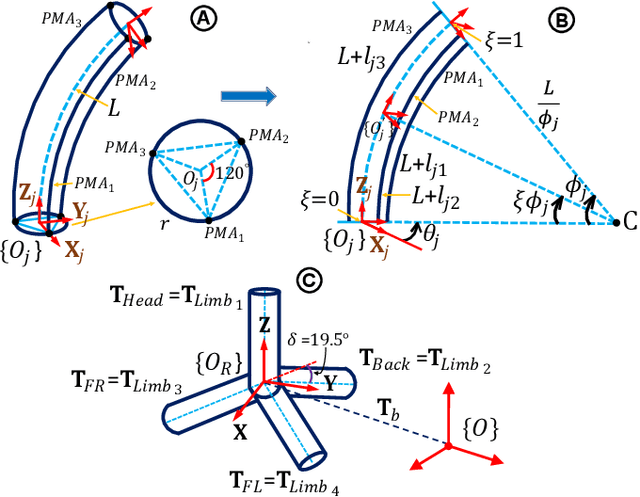
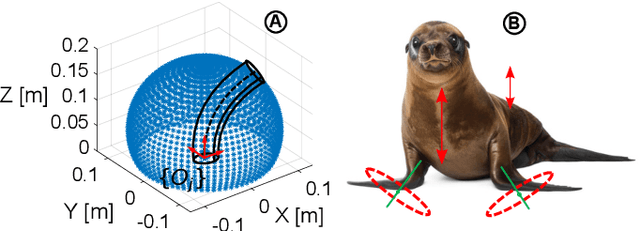
Legged locomotion is a highly promising but under-researched subfield within the field of soft robotics. The compliant limbs of soft-limbed robots offer numerous benefits, including the ability to regulate impacts, tolerate falls, and navigate through tight spaces. These robots have the potential to be used for various applications, such as search and rescue, inspection, surveillance, and more. The state-of-the-art still faces many challenges, including limited degrees of freedom, a lack of diversity in gait trajectories, insufficient limb dexterity, and limited payload capabilities. To address these challenges, we develop a modular soft-limbed robot that can mimic the locomotion of pinnipeds. By using a modular design approach, we aim to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities. We derive a complete floating-base kinematic model of the proposed robot and use it to generate and experimentally validate a variety of locomotion gaits. Results show that the proposed robot is capable of replicating these gaits effectively. We compare the locomotion trajectories under different gait parameters against our modeling results to demonstrate the validity of our proposed gait models.
Self-Reconfigurable Soft-Rigid Mobile Agent with Variable Stiffness and Adaptive Morphology
Oct 16, 2022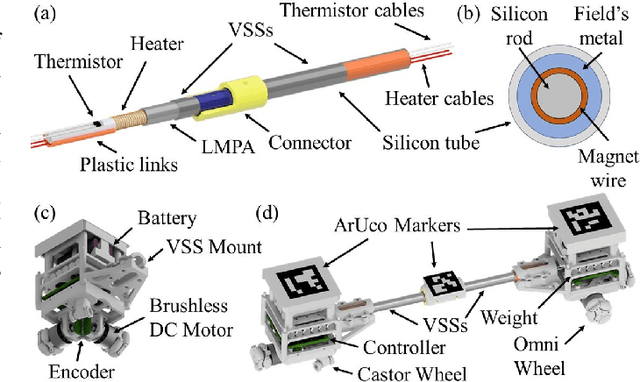
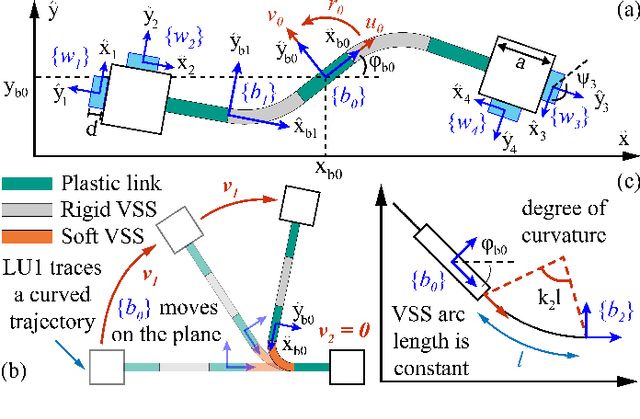
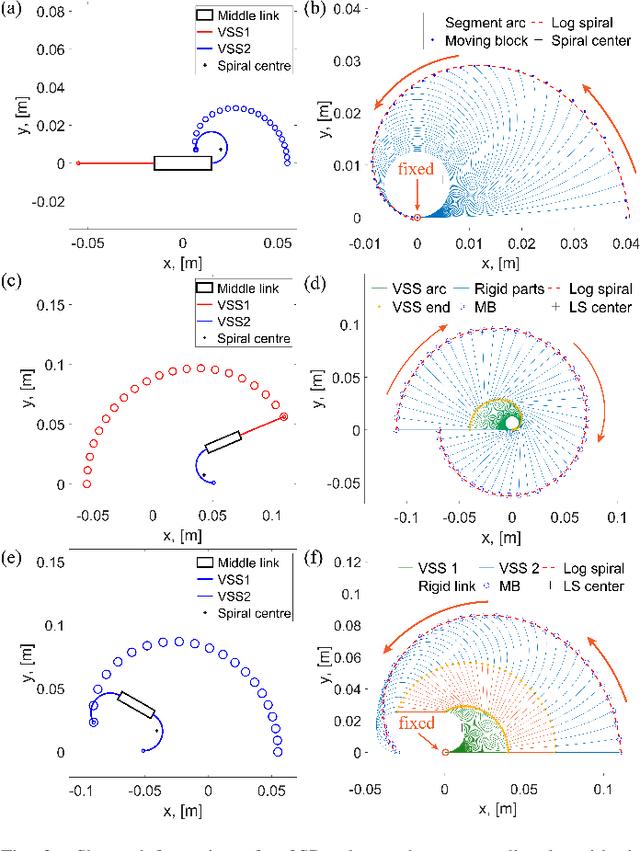
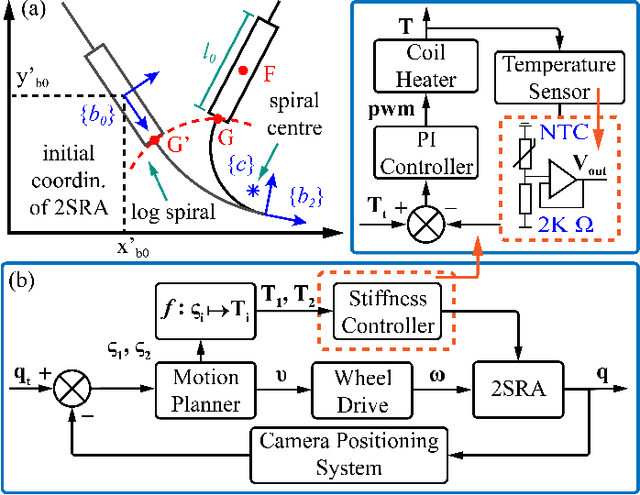
In this paper, we propose a novel design of a hybrid mobile robot with controllable stiffness and deformable shape. Compared to conventional mobile agents, our system can switch between rigid and compliant phases by solidifying or melting Field's metal in its structure and, thus, alter its shape through the motion of its active components. In the soft state, the robot's main body can bend into circular arcs, which enables it to conform to surrounding curved objects. This variable geometry of the robot creates new motion modes which cannot be described by standard (i.e., fixed geometry) models. To this end, we develop a unified mathematical model that captures the differential kinematics of both rigid and soft states. An optimised control strategy is further proposed to select the most appropriate phase states and motion modes needed to reach a target pose-shape configuration. The performance of our new method is validated with numerical simulations and experiments conducted on a prototype system. The simulation source code is available at https://github.com/Louashka/2sr-agent-simulation.git}{GitHub repository.
A Method to use Nonlinear Dynamics in a Whisker Sensor for Terrain Identification by Mobile Robots
Aug 04, 2021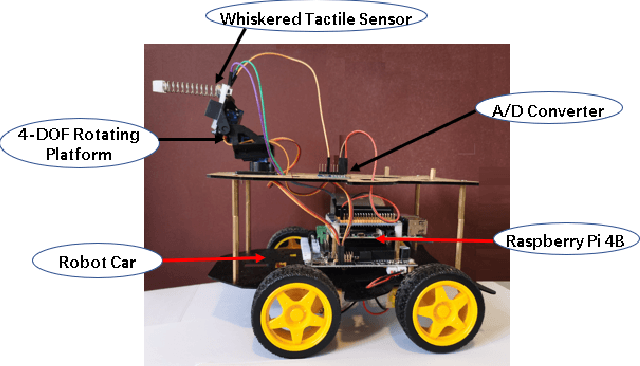
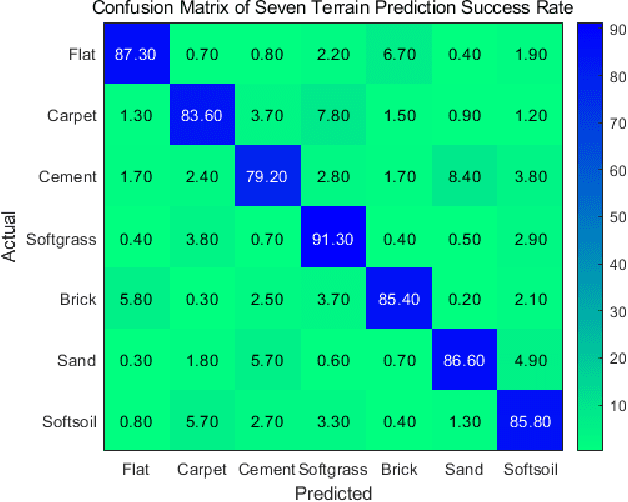
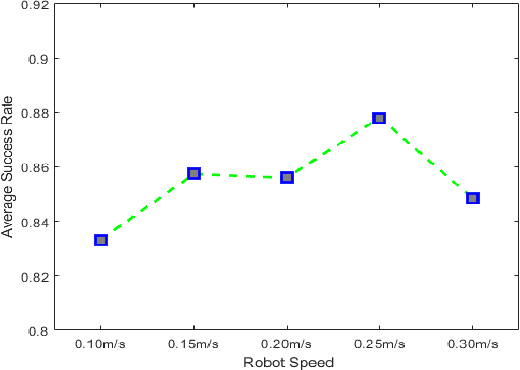
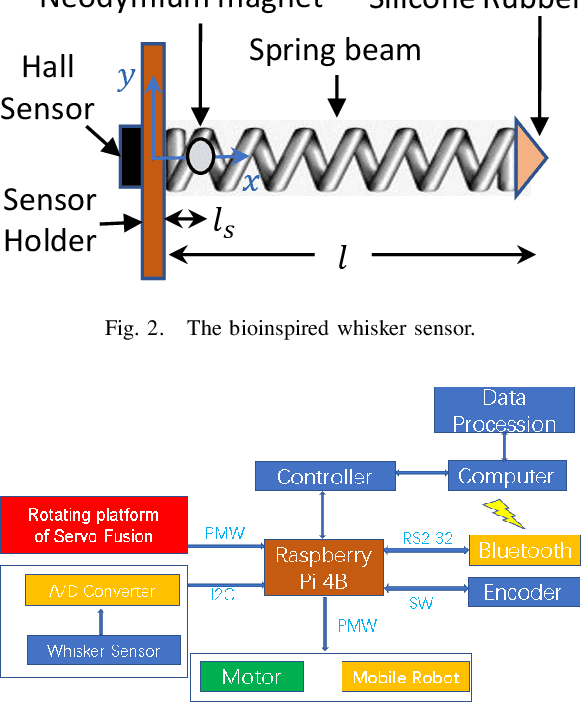
This paper shows analytical and experimental evidence of using the vibration dynamics of a compliant whisker for accurate terrain classification during steady state motion of a mobile robot. A Hall effect sensor was used to measure whisker vibrations due to perturbations from the ground. Analytical results predict that the whisker vibrations will have a dominant frequency at the vertical perturbation frequency of the mobile robot sandwiched by two other less dominant but distinct frequency components. These frequency components may come from bifurcation of vibration frequency due to nonlinear interaction dynamics at steady state. Experimental results also exhibit distinct dominant frequency components unique to the speed of the robot and the terrain roughness. This nonlinear dynamic feature is used in a deep multi-layer perceptron neural network to classify terrains. We achieved 85.6\% prediction success rate for seven flat terrain surfaces with different textures.