 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy on Soft Robotic Pinniped Locomotion
Apr 14, 2023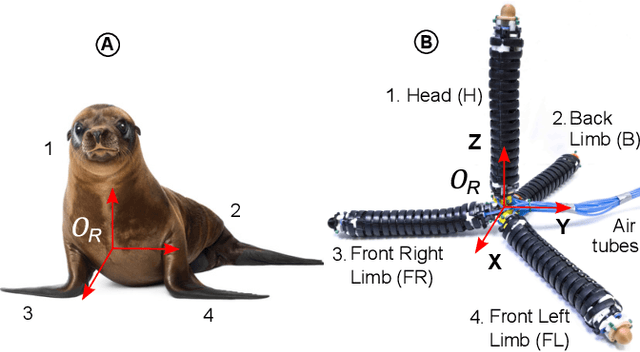
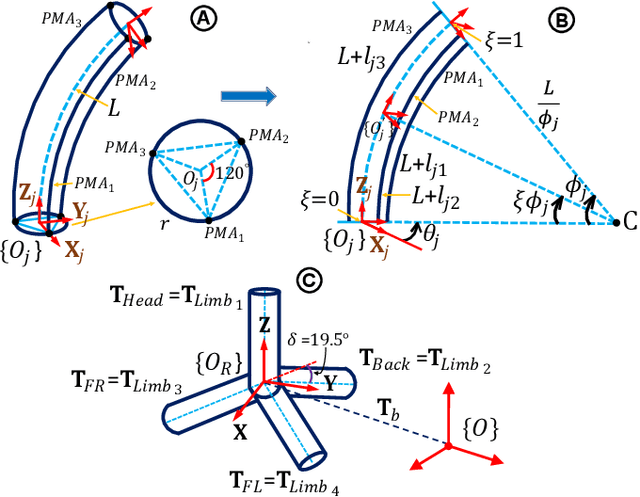
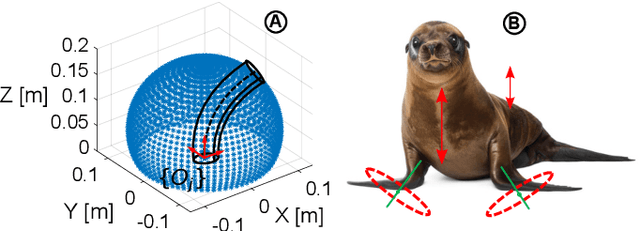
Legged locomotion is a highly promising but under-researched subfield within the field of soft robotics. The compliant limbs of soft-limbed robots offer numerous benefits, including the ability to regulate impacts, tolerate falls, and navigate through tight spaces. These robots have the potential to be used for various applications, such as search and rescue, inspection, surveillance, and more. The state-of-the-art still faces many challenges, including limited degrees of freedom, a lack of diversity in gait trajectories, insufficient limb dexterity, and limited payload capabilities. To address these challenges, we develop a modular soft-limbed robot that can mimic the locomotion of pinnipeds. By using a modular design approach, we aim to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities. We derive a complete floating-base kinematic model of the proposed robot and use it to generate and experimentally validate a variety of locomotion gaits. Results show that the proposed robot is capable of replicating these gaits effectively. We compare the locomotion trajectories under different gait parameters against our modeling results to demonstrate the validity of our proposed gait models.