 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy on Soft Robotic Pinniped Locomotion
Apr 14, 2023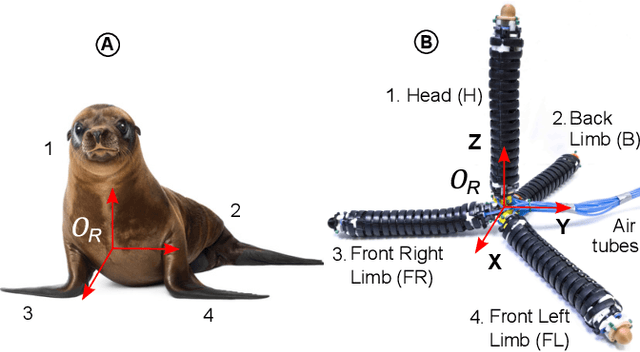
Legged locomotion is a highly promising but under-researched subfield within the field of soft robotics. The compliant limbs of soft-limbed robots offer numerous benefits, including the ability to regulate impacts, tolerate falls, and navigate through tight spaces. These robots have the potential to be used for various applications, such as search and rescue, inspection, surveillance, and more. The state-of-the-art still faces many challenges, including limited degrees of freedom, a lack of diversity in gait trajectories, insufficient limb dexterity, and limited payload capabilities. To address these challenges, we develop a modular soft-limbed robot that can mimic the locomotion of pinnipeds. By using a modular design approach, we aim to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities. We derive a complete floating-base kinematic model of the proposed robot and use it to generate and experimentally validate a variety of locomotion gaits. Results show that the proposed robot is capable of replicating these gaits effectively. We compare the locomotion trajectories under different gait parameters against our modeling results to demonstrate the validity of our proposed gait models.
Teleoperation of Soft Modular Robots: Study on Real-time Stability and Gait Control
Mar 09, 2023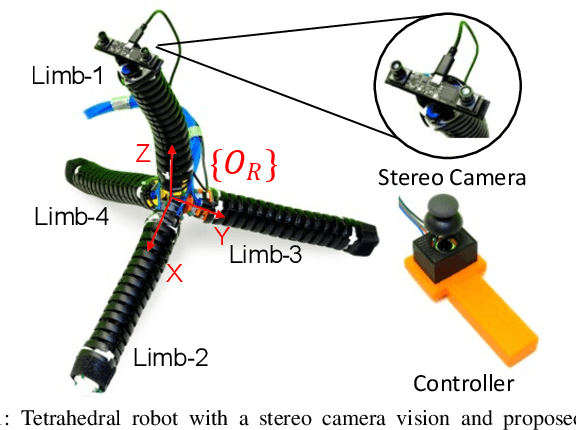
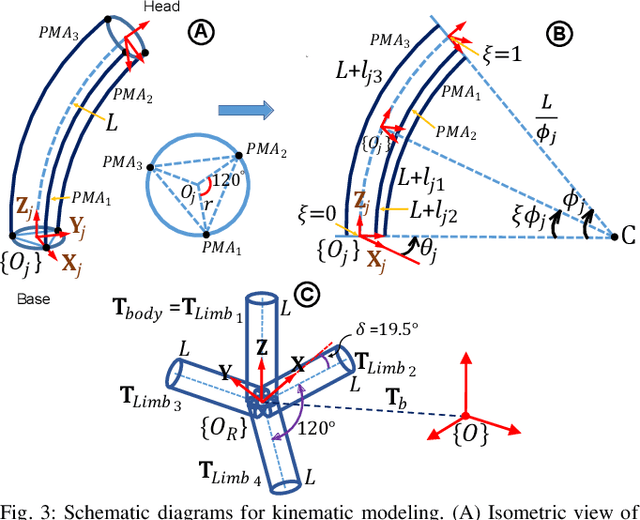
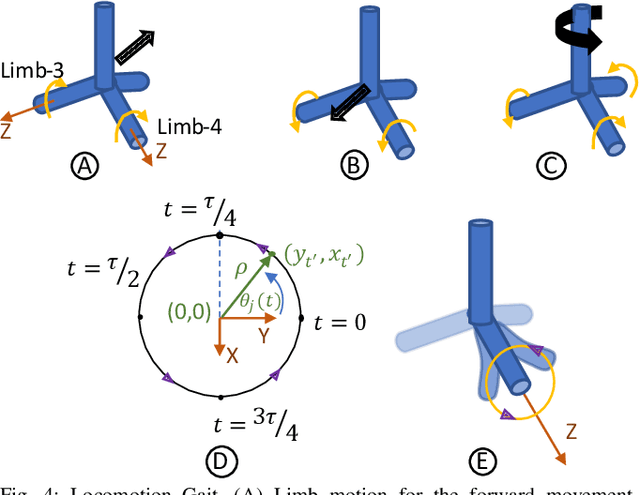
Soft robotics holds tremendous potential for various applications, especially in unstructured environments such as search and rescue operations. However, the lack of autonomy and teleoperability, limited capabilities, absence of gait diversity and real-time control, and onboard sensors to sense the surroundings are some of the common issues with soft-limbed robots. To overcome these limitations, we propose a spatially symmetric, topologically-stable, soft-limbed tetrahedral robot that can perform multiple locomotion gaits. We introduce a kinematic model, derive locomotion trajectories for different gaits, and design a teleoperation mechanism to enable real-time human-robot collaboration. We use the kinematic model to map teleoperation inputs and ensure smooth transitions between gaits. Additionally, we leverage the passive compliance and natural stability of the robot for toppling and obstacle navigation. Through experimental tests, we demonstrate the robot's ability to tackle various locomotion challenges, adapt to different situations, and navigate obstructed environments via teleoperation.
Wheelless Soft Robotic Snake Locomotion: Study on Sidewinding and Helical Rolling Gaits
Mar 04, 2023Soft robotic snakes (SRSs) have a unique combination of continuous and compliant properties that allow them to imitate the complex movements of biological snakes. Despite the previous attempts to develop SRSs, many have been limited to planar movements or use wheels to achieve locomotion, which restricts their ability to imitate the full range of biological snake movements. We propose a new design for the SRSs that is wheelless and powered by pneumatics, relying solely on spatial bending to achieve its movements. We derive a kinematic model of the proposed SRS and utilize it to achieve two snake locomotion trajectories, namely sidewinding and helical rolling. These movements are experimentally evaluated under different gait parameters on our SRS prototype. The results demonstrate that the SRS can successfully mimic the proposed spatial locomotion trajectories. This is a significant improvement over the previous designs, which were either limited to planar movements or relied on wheels for locomotion. The ability of the SRS to effectively mimic the complex movements of biological snakes opens up new possibilities for its use in various applications.
Dynamic Modeling and Validation of Soft Robotic Snake Locomotion
Mar 04, 2023



Soft robotic snakes made of compliant materials can continuously deform their bodies and, therefore, mimic the biological snakes' flexible and agile locomotion gaits better than their rigid-bodied counterparts. Without wheel support, to date, soft robotic snakes are limited to emulating planar locomotion gaits, which are derived via kinematic modeling and tested on robotic prototypes. Given that the snake locomotion results from the reaction forces due to the distributed contact between their skin and the ground, it is essential to investigate the locomotion gaits through efficient dynamic models capable of accommodating distributed contact forces. We present a complete spatial dynamic model that utilizes a floating-base kinematic model with distributed contact dynamics for a pneumatically powered soft robotic snake. We numerically evaluate the feasibility of the planar and spatial rolling gaits utilizing the proposed model and experimentally validate the corresponding locomotion gait trajectories on a soft robotic snake prototype. We qualitatively and quantitatively compare the numerical and experimental results which confirm the validity of the proposed dynamic model.
Hybrid Soft Robots Incorporating Soft and Stiff Elements
Feb 14, 2022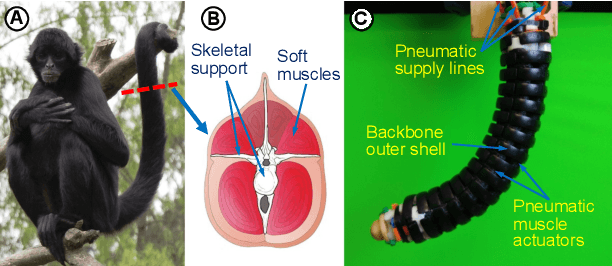


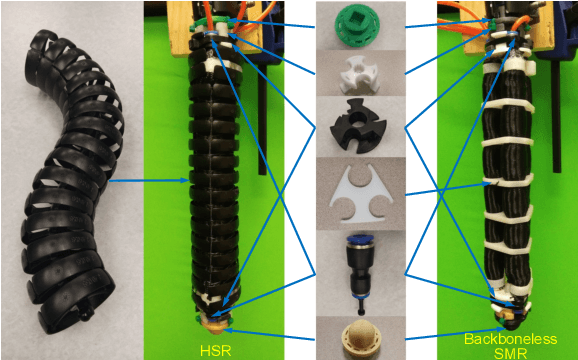
Soft robots are inherently compliant and have a strong potential to realize human-friendly and safe robots. Despite continued research highlighting the potential of soft robots, they remain largely confined to laboratory settings. In this work, inspired by spider monkeys' tails, we propose a hybrid soft robot (HSR) design. We detail the design objectives and methodology to improve the controllable stiffness range and achieve independent stiffness and shape control. We extend the curve parametric approach to We experimentally demonstrate that the proposed HSR has about a 100% stiffness range increase than a previous soft robot design with identical physical dimensions. In addition, we empirically map HSR's bending shape-pressure-stiffness and present an application example - a soft robotic gripper - to demonstrate the decoupled nature of stiffness and shape variations. Experimental results show that proposed HSR can be successfully used in applications where independent stiffness and shape control is desired.