 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy on Soft Robotic Pinniped Locomotion
Apr 14, 2023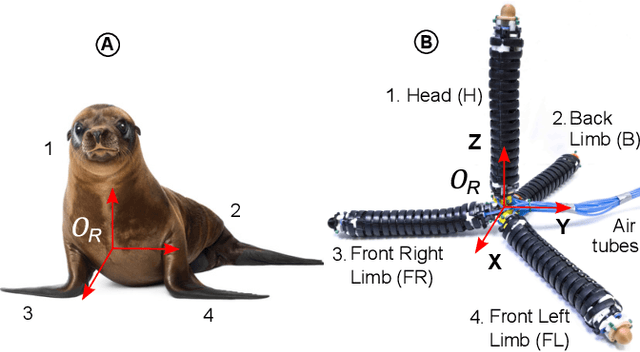
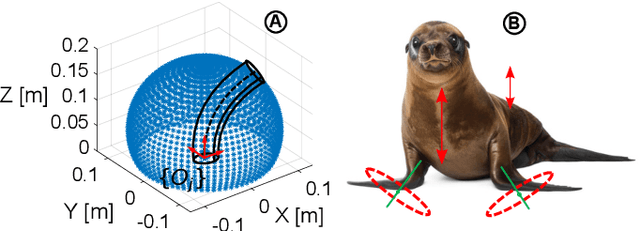
Legged locomotion is a highly promising but under-researched subfield within the field of soft robotics. The compliant limbs of soft-limbed robots offer numerous benefits, including the ability to regulate impacts, tolerate falls, and navigate through tight spaces. These robots have the potential to be used for various applications, such as search and rescue, inspection, surveillance, and more. The state-of-the-art still faces many challenges, including limited degrees of freedom, a lack of diversity in gait trajectories, insufficient limb dexterity, and limited payload capabilities. To address these challenges, we develop a modular soft-limbed robot that can mimic the locomotion of pinnipeds. By using a modular design approach, we aim to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities. We derive a complete floating-base kinematic model of the proposed robot and use it to generate and experimentally validate a variety of locomotion gaits. Results show that the proposed robot is capable of replicating these gaits effectively. We compare the locomotion trajectories under different gait parameters against our modeling results to demonstrate the validity of our proposed gait models.
Dynamic Modeling and Validation of Soft Robotic Snake Locomotion
Mar 04, 2023



Soft robotic snakes made of compliant materials can continuously deform their bodies and, therefore, mimic the biological snakes' flexible and agile locomotion gaits better than their rigid-bodied counterparts. Without wheel support, to date, soft robotic snakes are limited to emulating planar locomotion gaits, which are derived via kinematic modeling and tested on robotic prototypes. Given that the snake locomotion results from the reaction forces due to the distributed contact between their skin and the ground, it is essential to investigate the locomotion gaits through efficient dynamic models capable of accommodating distributed contact forces. We present a complete spatial dynamic model that utilizes a floating-base kinematic model with distributed contact dynamics for a pneumatically powered soft robotic snake. We numerically evaluate the feasibility of the planar and spatial rolling gaits utilizing the proposed model and experimentally validate the corresponding locomotion gait trajectories on a soft robotic snake prototype. We qualitatively and quantitatively compare the numerical and experimental results which confirm the validity of the proposed dynamic model.
Quantitative Evaluation of Endoscopic SLAM Methods: EndoSLAM Dataset
Jul 01, 2020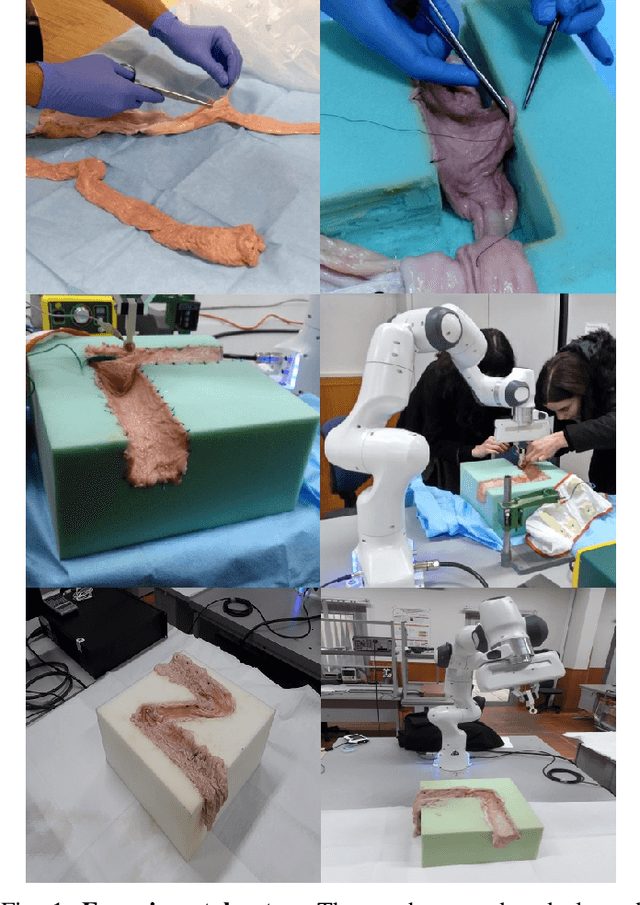

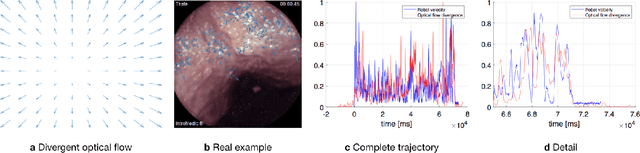
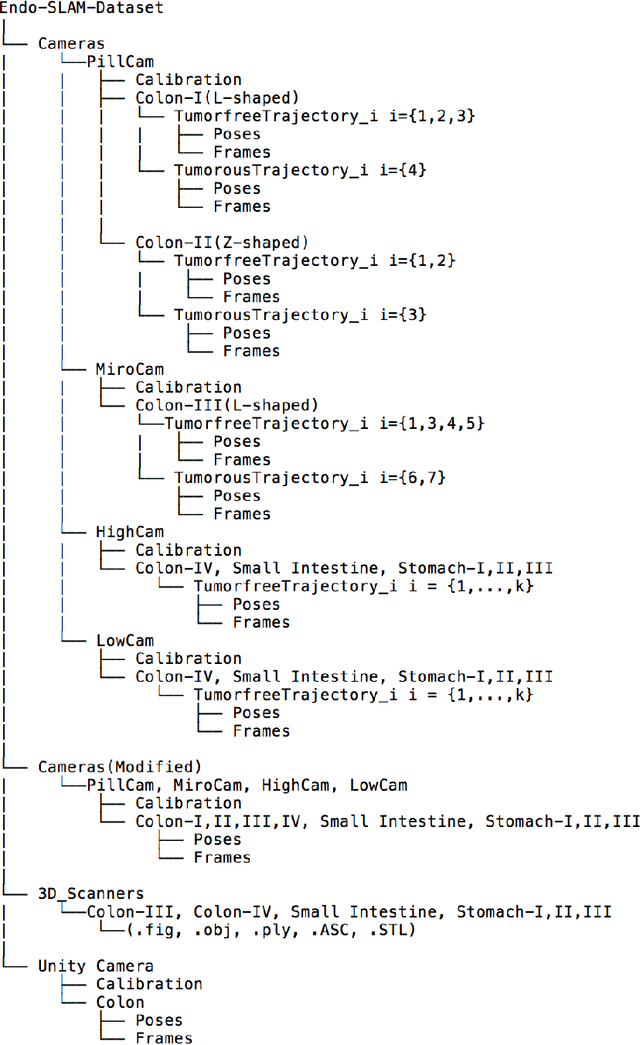
Deep learning techniques hold promise to improve dense topography reconstruction and pose estimation, as well as simultaneous localization and mapping (SLAM). However, currently available datasets do not support effective quantitative benchmarking. With this paper, we introduce a comprehensive endoscopic SLAM dataset containing both capsule and standard endoscopy recordings. A Panda robotic arm, two different commercially available high precision 3D scanners, two different commercially available capsule endoscopes with different camera properties and two different conventional endoscopy cameras were employed to collect data from eight ex-vivo porcine gastrointestinal (GI)-tract organs. In total, 35 sub-datasets are provided: 18 sub-datasets for colon, 12 sub-datasets for stomach and five sub-datasets for small intestine, while four of these contain polyp-mimicking elevations carried out by an expert gastroenterologist. To exemplify the use-case, SC-SfMLearner was comprehensively benchmarked. The codes and the link for the dataset are publicly available at https://github.com/CapsuleEndoscope/EndoSLAM. A video demonstrating the experimental setup and procedure is available at https://www.youtube.com/watch?v=G_LCe0aWWdQ.