 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to turn your camera into a perfect pinhole model
Sep 20, 2023Camera calibration is a first and fundamental step in various computer vision applications. Despite being an active field of research, Zhang's method remains widely used for camera calibration due to its implementation in popular toolboxes. However, this method initially assumes a pinhole model with oversimplified distortion models. In this work, we propose a novel approach that involves a pre-processing step to remove distortions from images by means of Gaussian processes. Our method does not need to assume any distortion model and can be applied to severely warped images, even in the case of multiple distortion sources, e.g., a fisheye image of a curved mirror reflection. The Gaussian processes capture all distortions and camera imperfections, resulting in virtual images as though taken by an ideal pinhole camera with square pixels. Furthermore, this ideal GP-camera only needs one image of a square grid calibration pattern. This model allows for a serious upgrade of many algorithms and applications that are designed in a pure projective geometry setting but with a performance that is very sensitive to nonlinear lens distortions. We demonstrate the effectiveness of our method by simplifying Zhang's calibration method, reducing the number of parameters and getting rid of the distortion parameters and iterative optimization. We validate by means of synthetic data and real world images. The contributions of this work include the construction of a virtual ideal pinhole camera using Gaussian processes, a simplified calibration method and lens distortion removal.
Quantitative Evaluation of Endoscopic SLAM Methods: EndoSLAM Dataset
Jul 01, 2020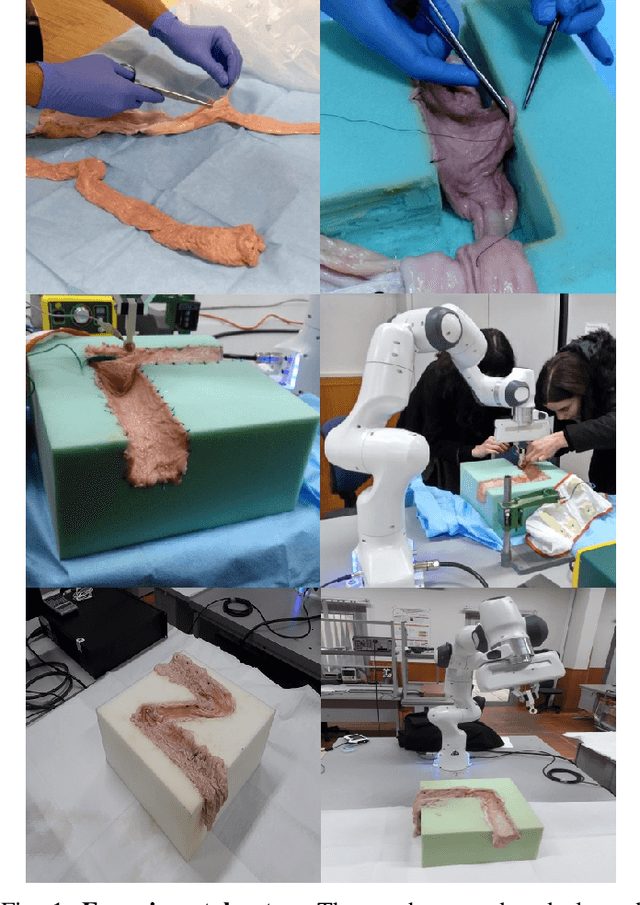

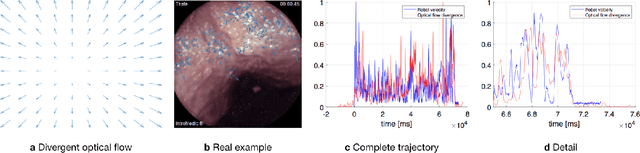
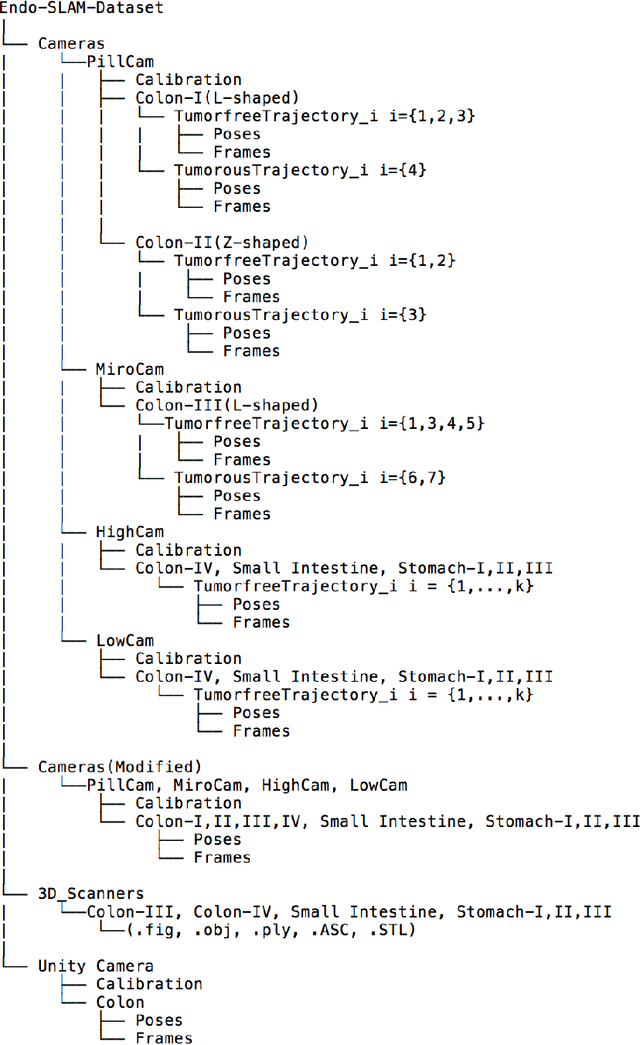
Deep learning techniques hold promise to improve dense topography reconstruction and pose estimation, as well as simultaneous localization and mapping (SLAM). However, currently available datasets do not support effective quantitative benchmarking. With this paper, we introduce a comprehensive endoscopic SLAM dataset containing both capsule and standard endoscopy recordings. A Panda robotic arm, two different commercially available high precision 3D scanners, two different commercially available capsule endoscopes with different camera properties and two different conventional endoscopy cameras were employed to collect data from eight ex-vivo porcine gastrointestinal (GI)-tract organs. In total, 35 sub-datasets are provided: 18 sub-datasets for colon, 12 sub-datasets for stomach and five sub-datasets for small intestine, while four of these contain polyp-mimicking elevations carried out by an expert gastroenterologist. To exemplify the use-case, SC-SfMLearner was comprehensively benchmarked. The codes and the link for the dataset are publicly available at https://github.com/CapsuleEndoscope/EndoSLAM. A video demonstrating the experimental setup and procedure is available at https://www.youtube.com/watch?v=G_LCe0aWWdQ.