 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Point Cloud Surface Reconstruction using B-Splines
Sep 19, 2025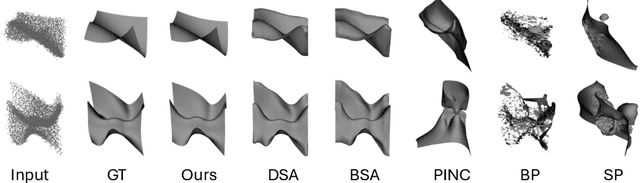
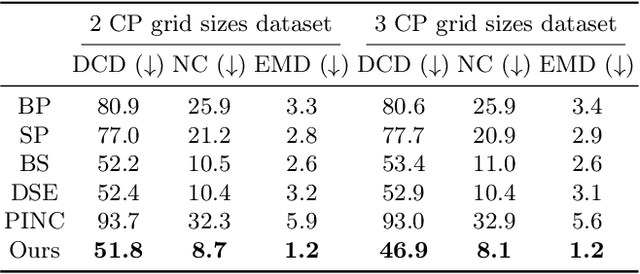
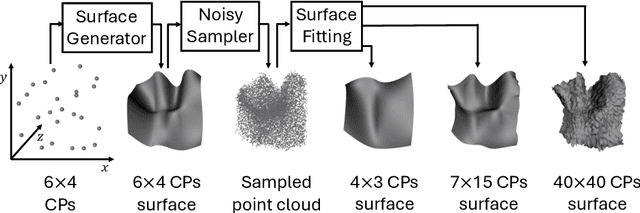

Generating continuous surfaces from discrete point cloud data is a fundamental task in several 3D vision applications. Real-world point clouds are inherently noisy due to various technical and environmental factors. Existing data-driven surface reconstruction algorithms rely heavily on ground truth normals or compute approximate normals as an intermediate step. This dependency makes them extremely unreliable for noisy point cloud datasets, even if the availability of ground truth training data is ensured, which is not always the case. B-spline reconstruction techniques provide compact surface representations of point clouds and are especially known for their smoothening properties. However, the complexity of the surfaces approximated using B-splines is directly influenced by the number and location of the spline control points. Existing spline-based modeling methods predict the locations of a fixed number of control points for a given point cloud, which makes it very difficult to match the complexity of its underlying surface. In this work, we develop a Dictionary-Guided Graph Convolutional Network-based surface reconstruction strategy where we simultaneously predict both the location and the number of control points for noisy point cloud data to generate smooth surfaces without the use of any point normals. We compare our reconstruction method with several well-known as well as recent baselines by employing widely-used evaluation metrics, and demonstrate that our method outperforms all of them both qualitatively and quantitatively.
Revisiting Point Cloud Completion: Are We Ready For The Real-World?
Nov 26, 2024Point clouds acquired in constrained and challenging real-world settings are incomplete, non-uniformly sparse, or both. These obstacles present acute challenges for a vital task - point cloud completion. Using tools from Algebraic Topology and Persistent Homology ($\mathcal{PH}$), we demonstrate that current benchmark synthetic point clouds lack rich topological features that are important constituents of point clouds captured in realistic settings. To facilitate research in this direction, we contribute the first real-world industrial point cloud dataset for point cloud completion, RealPC - a diverse set of rich and varied point clouds, consisting of $\sim$ 40,000 pairs across 21 categories of industrial structures in railway establishments. Our benchmark results on several strong baselines reveal a striking observation - the existing methods are tailored for synthetic datasets and fail miserably in real-world settings. Building on our observation that RealPC consists of several 0 and 1-dimensional $\mathcal{PH}$-based topological features, we demonstrate the potential of integrating Homology-based topological priors into existing works. More specifically, we present how 0-dimensional $\mathcal{PH}$ priors, which extract the global topology of a complete shape in the form of a 3-D skeleton, can assist a model in generating topologically-consistent complete shapes.
How to turn your camera into a perfect pinhole model
Sep 20, 2023Camera calibration is a first and fundamental step in various computer vision applications. Despite being an active field of research, Zhang's method remains widely used for camera calibration due to its implementation in popular toolboxes. However, this method initially assumes a pinhole model with oversimplified distortion models. In this work, we propose a novel approach that involves a pre-processing step to remove distortions from images by means of Gaussian processes. Our method does not need to assume any distortion model and can be applied to severely warped images, even in the case of multiple distortion sources, e.g., a fisheye image of a curved mirror reflection. The Gaussian processes capture all distortions and camera imperfections, resulting in virtual images as though taken by an ideal pinhole camera with square pixels. Furthermore, this ideal GP-camera only needs one image of a square grid calibration pattern. This model allows for a serious upgrade of many algorithms and applications that are designed in a pure projective geometry setting but with a performance that is very sensitive to nonlinear lens distortions. We demonstrate the effectiveness of our method by simplifying Zhang's calibration method, reducing the number of parameters and getting rid of the distortion parameters and iterative optimization. We validate by means of synthetic data and real world images. The contributions of this work include the construction of a virtual ideal pinhole camera using Gaussian processes, a simplified calibration method and lens distortion removal.
One-shot Feature-Preserving Point Cloud Simplification with Gaussian Processes on Riemannian Manifolds
Mar 27, 2023The processing, storage and transmission of large-scale point clouds is an ongoing challenge in the computer vision community which hinders progress in the application of 3D models to real-world settings, such as autonomous driving, virtual reality and remote sensing. We propose a novel, one-shot point cloud simplification method which preserves both the salient structural features and the overall shape of a point cloud without any prior surface reconstruction step. Our method employs Gaussian processes with kernels defined on Riemannian manifolds, allowing us to model the surface variation function across any given point cloud. A simplified version of the original cloud is obtained by sequentially selecting points using a greedy sparsification scheme. The selection criterion used for this scheme ensures that the simplified cloud best represents the surface variation of the original point cloud. We evaluate our method on several benchmark datasets, compare it to a range of existing methods and show that our method is competitive both in terms of empirical performance and computational efficiency.
Enabling Humans to Plan Inspection Paths Using a Virtual Reality Interface
Sep 13, 2019
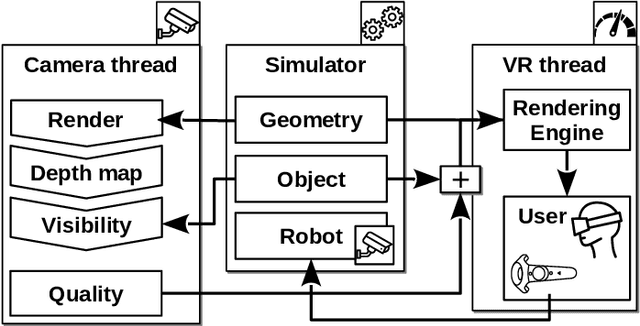
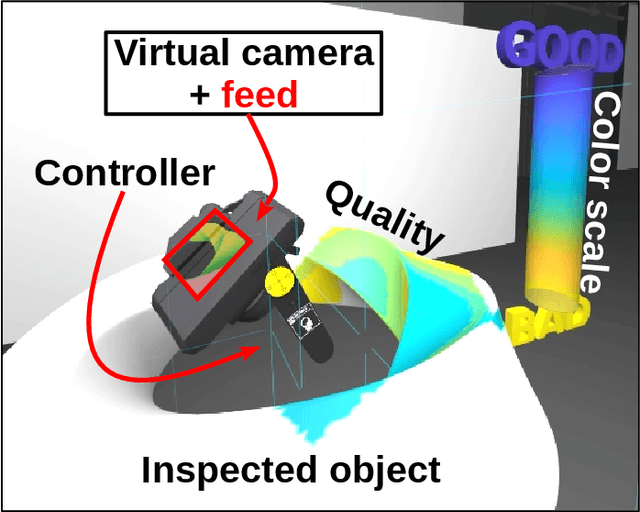
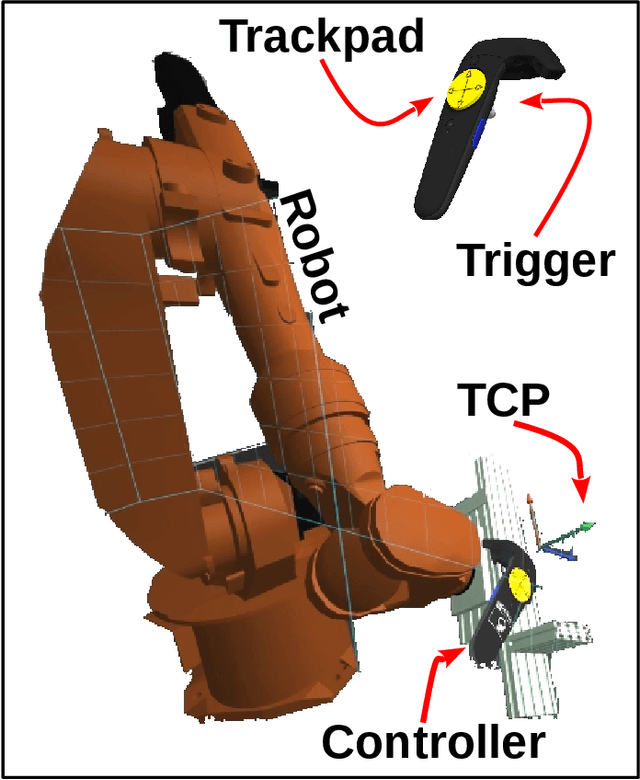
In this work, we investigate whether humans can manually generate high-quality robot paths for optical inspections. Typically, automated algorithms are used to solve the inspection planning problem. The use of automated algorithms implies that specialized knowledge from users is needed to set up the algorithm. We aim to replace this need for specialized experience, by entrusting a non-expert human user with the planning task. We augment this user with intuitive visualizations and interactions in virtual reality. To investigate if humans can generate high-quality inspection paths, we perform a user study in which users from different experience categories, generate inspection paths with the proposed virtual reality interface. From our study, it can be concluded that users without experience can generate high-quality inspection paths: The median inspection quality of user generated paths ranged between 66-81\% of the quality of a state-of-the-art automated algorithm on various inspection planning scenarios. We noticed however, a sizable variation in the performance of users, which is a result of some typical user behaviors. These behaviors are discussed, and possible solutions are provided.
Near-Optimal Path Planning for Complex Robotic Inspection Tasks
May 14, 2019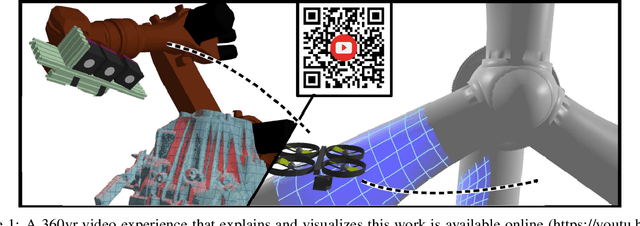
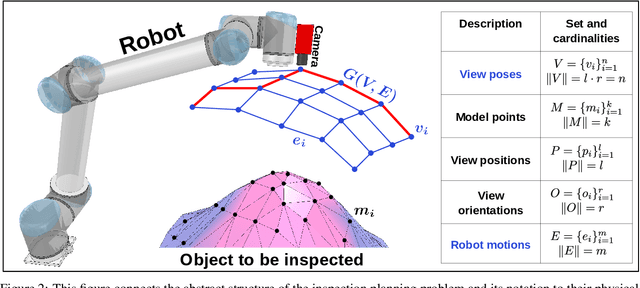
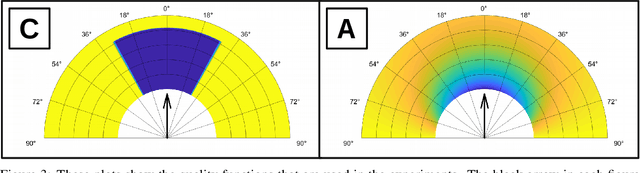
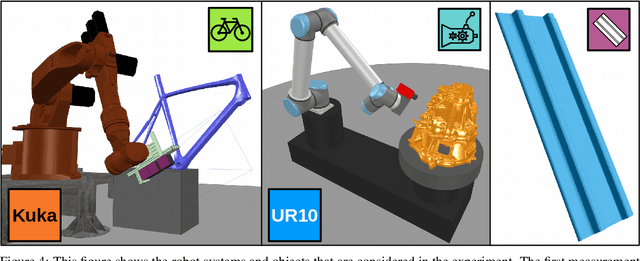
In this paper, we consider the problem of generating inspection paths for robots. These paths should allow an attached measurement device to perform high-quality measurements. We formally show that generating robot paths, while maximizing the inspection quality, naturally corresponds to the submodular orienteering problem. Traditional methods that are able to generate solutions with mathematical guarantees do not scale to real-world problems. In this work, we propose a method that is able to generate near-optimal solutions for real-world complex problems. We experimentally test this method in a wide variety of inspection problems and show that it nearly always outperforms traditional methods. We furthermore show that the near-optimality of our approach makes it more robust to changing the inspection problem, and is thus more general.