 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeleoperation of Soft Modular Robots: Study on Real-time Stability and Gait Control
Mar 09, 2023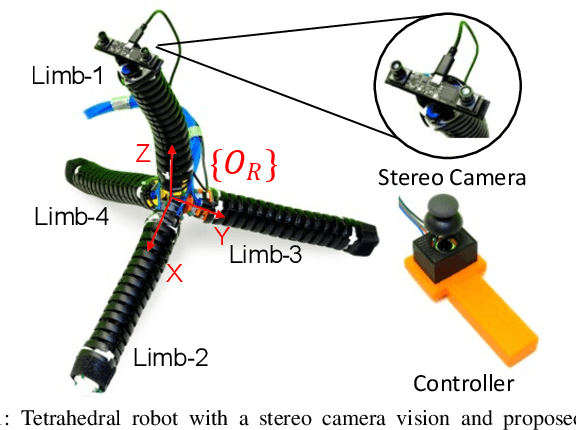
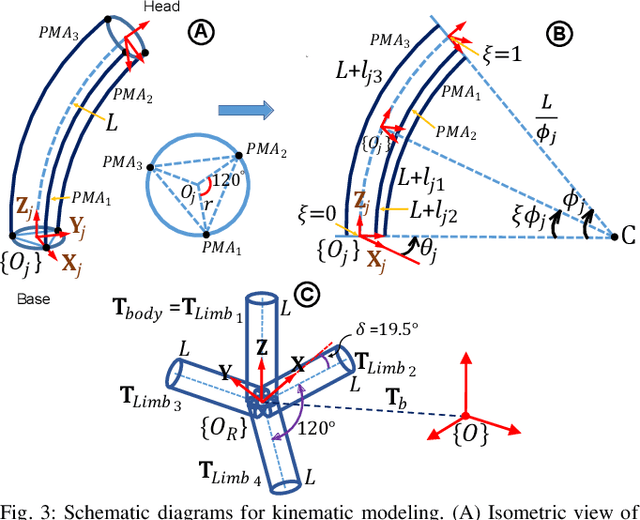
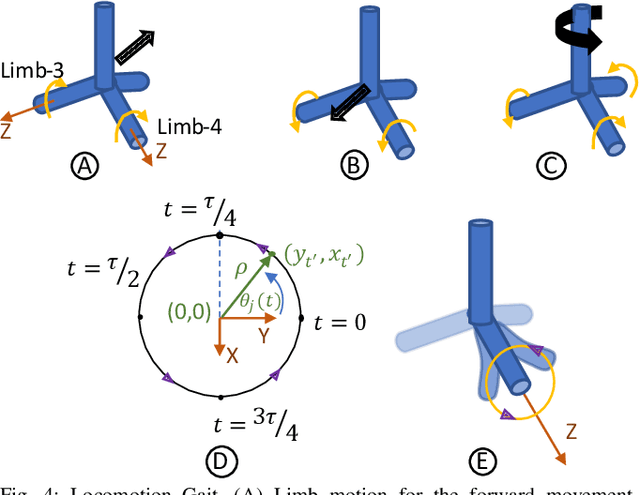
Soft robotics holds tremendous potential for various applications, especially in unstructured environments such as search and rescue operations. However, the lack of autonomy and teleoperability, limited capabilities, absence of gait diversity and real-time control, and onboard sensors to sense the surroundings are some of the common issues with soft-limbed robots. To overcome these limitations, we propose a spatially symmetric, topologically-stable, soft-limbed tetrahedral robot that can perform multiple locomotion gaits. We introduce a kinematic model, derive locomotion trajectories for different gaits, and design a teleoperation mechanism to enable real-time human-robot collaboration. We use the kinematic model to map teleoperation inputs and ensure smooth transitions between gaits. Additionally, we leverage the passive compliance and natural stability of the robot for toppling and obstacle navigation. Through experimental tests, we demonstrate the robot's ability to tackle various locomotion challenges, adapt to different situations, and navigate obstructed environments via teleoperation.
Wheelless Soft Robotic Snake Locomotion: Study on Sidewinding and Helical Rolling Gaits
Mar 04, 2023Soft robotic snakes (SRSs) have a unique combination of continuous and compliant properties that allow them to imitate the complex movements of biological snakes. Despite the previous attempts to develop SRSs, many have been limited to planar movements or use wheels to achieve locomotion, which restricts their ability to imitate the full range of biological snake movements. We propose a new design for the SRSs that is wheelless and powered by pneumatics, relying solely on spatial bending to achieve its movements. We derive a kinematic model of the proposed SRS and utilize it to achieve two snake locomotion trajectories, namely sidewinding and helical rolling. These movements are experimentally evaluated under different gait parameters on our SRS prototype. The results demonstrate that the SRS can successfully mimic the proposed spatial locomotion trajectories. This is a significant improvement over the previous designs, which were either limited to planar movements or relied on wheels for locomotion. The ability of the SRS to effectively mimic the complex movements of biological snakes opens up new possibilities for its use in various applications.
Dynamic Modeling and Validation of Soft Robotic Snake Locomotion
Mar 04, 2023



Soft robotic snakes made of compliant materials can continuously deform their bodies and, therefore, mimic the biological snakes' flexible and agile locomotion gaits better than their rigid-bodied counterparts. Without wheel support, to date, soft robotic snakes are limited to emulating planar locomotion gaits, which are derived via kinematic modeling and tested on robotic prototypes. Given that the snake locomotion results from the reaction forces due to the distributed contact between their skin and the ground, it is essential to investigate the locomotion gaits through efficient dynamic models capable of accommodating distributed contact forces. We present a complete spatial dynamic model that utilizes a floating-base kinematic model with distributed contact dynamics for a pneumatically powered soft robotic snake. We numerically evaluate the feasibility of the planar and spatial rolling gaits utilizing the proposed model and experimentally validate the corresponding locomotion gait trajectories on a soft robotic snake prototype. We qualitatively and quantitatively compare the numerical and experimental results which confirm the validity of the proposed dynamic model.