 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy on Soft Robotic Pinniped Locomotion
Apr 14, 2023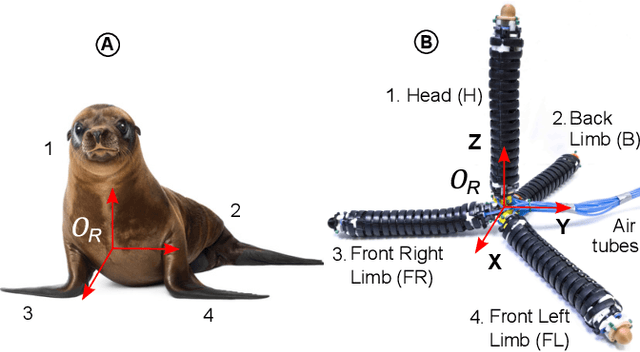
Legged locomotion is a highly promising but under-researched subfield within the field of soft robotics. The compliant limbs of soft-limbed robots offer numerous benefits, including the ability to regulate impacts, tolerate falls, and navigate through tight spaces. These robots have the potential to be used for various applications, such as search and rescue, inspection, surveillance, and more. The state-of-the-art still faces many challenges, including limited degrees of freedom, a lack of diversity in gait trajectories, insufficient limb dexterity, and limited payload capabilities. To address these challenges, we develop a modular soft-limbed robot that can mimic the locomotion of pinnipeds. By using a modular design approach, we aim to create a robot that has improved degrees of freedom, gait trajectory diversity, limb dexterity, and payload capabilities. We derive a complete floating-base kinematic model of the proposed robot and use it to generate and experimentally validate a variety of locomotion gaits. Results show that the proposed robot is capable of replicating these gaits effectively. We compare the locomotion trajectories under different gait parameters against our modeling results to demonstrate the validity of our proposed gait models.
Toward an Expressive Bipedal Robot: Variable Gait Synthesis and Validation in a Planar Model
Sep 13, 2018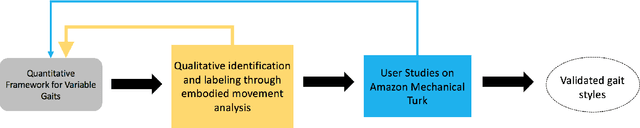
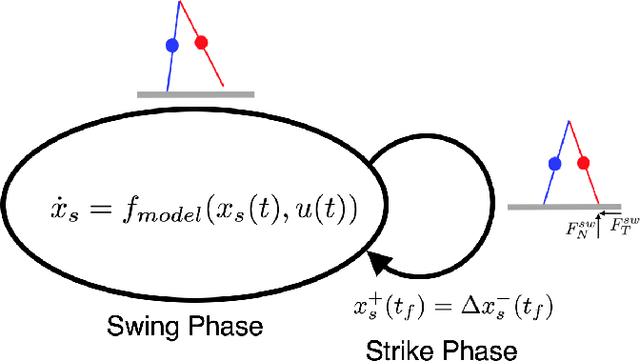
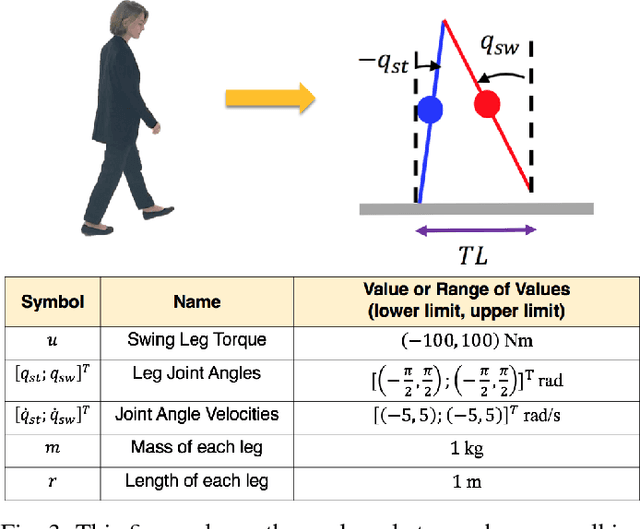
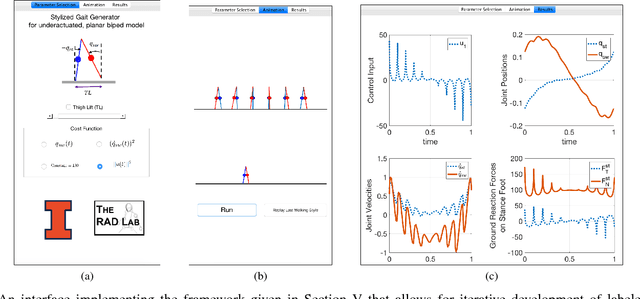
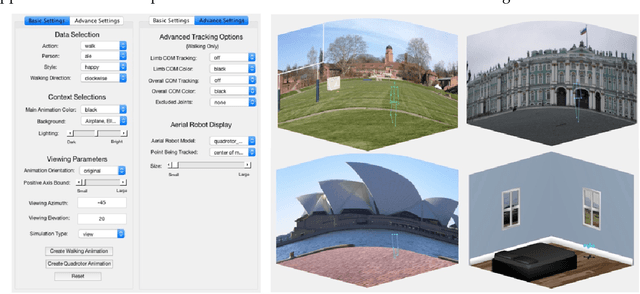
Humans are efficient, yet expressive in their motion. Human walking behaviors can be used to walk across a great variety of surfaces without falling and to communicate internal state to other humans through variable gait styles. This provides inspiration for creating similarly expressive bipedal robots. To this end, a framework is presented for stylistic gait generation in a compass-like under-actuated planar biped model. The gait design is done using model-based trajectory optimization with variable constraints. For a finite range of optimization parameters, a large set of 360 gaits can be generated for this model. In particular, step length and cost function are varied to produce distinct cyclic walking gaits. From these resulting gaits, 6 gaits are identified and labeled, using embodied movement analysis, with stylistic verbs that correlate with human activity, e.g., "lope" and "saunter". These labels have been validated by conducting user studies in Amazon Mechanical Turk and thus demonstrate that visually distinguishable, meaningful gaits are generated using this framework. This lays groundwork for creating a bipedal humanoid with variable socially competent movement profiles.
Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems
Dec 21, 2017

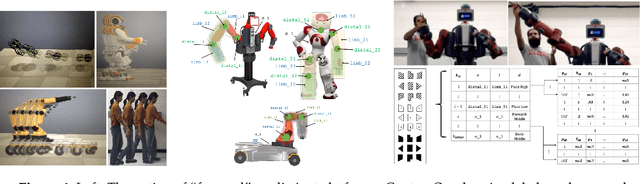
As robotic systems are moved out of factory work cells into human-facing environments questions of choreography become central to their design, placement, and application. With a human viewer or counterpart present, a system will automatically be interpreted within context, style of movement, and form factor by human beings as animate elements of their environment. The interpretation by this human counterpart is critical to the success of the system's integration: knobs on the system need to make sense to a human counterpart; an artificial agent should have a way of notifying a human counterpart of a change in system state, possibly through motion profiles; and the motion of a human counterpart may have important contextual clues for task completion. Thus, professional choreographers, dance practitioners, and movement analysts are critical to research in robotics. They have design methods for movement that align with human audience perception, can identify simplified features of movement for human-robot interaction goals, and have detailed knowledge of the capacity of human movement. This article provides approaches employed by one research lab, specific impacts on technical and artistic projects within, and principles that may guide future such work. The background section reports on choreography, somatic perspectives, improvisation, the Laban/Bartenieff Movement System, and robotics. From this context methods including embodied exercises, writing prompts, and community building activities have been developed to facilitate interdisciplinary research. The results of this work is presented as an overview of a smattering of projects in areas like high-level motion planning, software development for rapid prototyping of movement, artistic output, and user studies that help understand how people interpret movement. Finally, guiding principles for other groups to adopt are posited.