 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreathless: An 8-hour Performance Contrasting Human and Robot Expressiveness
Nov 19, 2024



This paper describes the robot technology behind an original performance that pairs a human dancer (Cuan) with an industrial robot arm for an eight-hour dance that unfolds over the timespan of an American workday. To control the robot arm, we combine a range of sinusoidal motions with varying amplitude, frequency and offset at each joint to evoke human motions common in physical labor such as stirring, digging, and stacking. More motions were developed using deep learning techniques for video-based human-pose tracking and extraction. We combine these pre-recorded motions with improvised robot motions created live by putting the robot into teach-mode and triggering force sensing from the robot joints onstage. All motions are combined with commercial and original music using a custom suite of python software with AppleScript, Keynote, and Zoom to facilitate on-stage communication with the dancer. The resulting performance contrasts the expressivity of the human body with the precision of robot machinery. Video, code and data are available on the project website: https://sites.google.com/playing.studio/breathless
Interactive Multi-Robot Flocking with Gesture Responsiveness and Musical Accompaniment
Mar 30, 2024For decades, robotics researchers have pursued various tasks for multi-robot systems, from cooperative manipulation to search and rescue. These tasks are multi-robot extensions of classical robotic tasks and often optimized on dimensions such as speed or efficiency. As robots transition from commercial and research settings into everyday environments, social task aims such as engagement or entertainment become increasingly relevant. This work presents a compelling multi-robot task, in which the main aim is to enthrall and interest. In this task, the goal is for a human to be drawn to move alongside and participate in a dynamic, expressive robot flock. Towards this aim, the research team created algorithms for robot movements and engaging interaction modes such as gestures and sound. The contributions are as follows: (1) a novel group navigation algorithm involving human and robot agents, (2) a gesture responsive algorithm for real-time, human-robot flocking interaction, (3) a weight mode characterization system for modifying flocking behavior, and (4) a method of encoding a choreographer's preferences inside a dynamic, adaptive, learned system. An experiment was performed to understand individual human behavior while interacting with the flock under three conditions: weight modes selected by a human choreographer, a learned model, or subset list. Results from the experiment showed that the perception of the experience was not influenced by the weight mode selection. This work elucidates how differing task aims such as engagement manifest in multi-robot system design and execution, and broadens the domain of multi-robot tasks.
Music Mode: Transforming Robot Movement into Music Increases Likability and Perceived Intelligence
Jun 05, 2023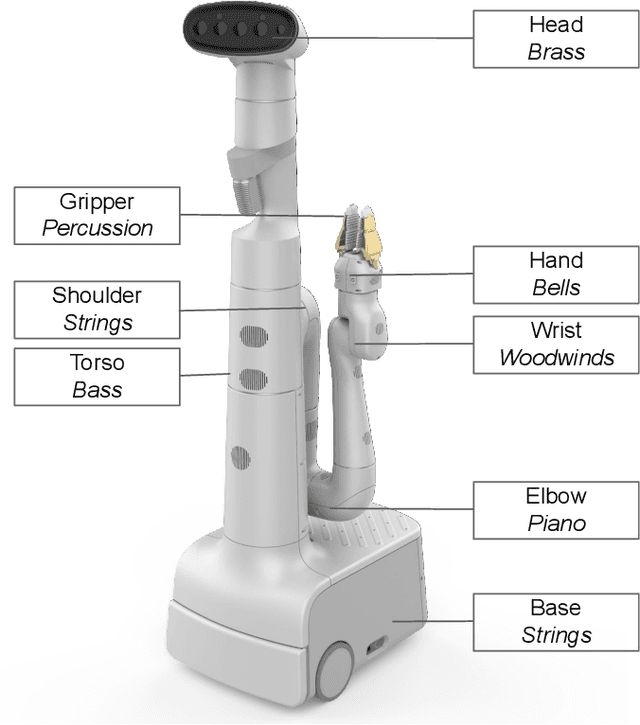
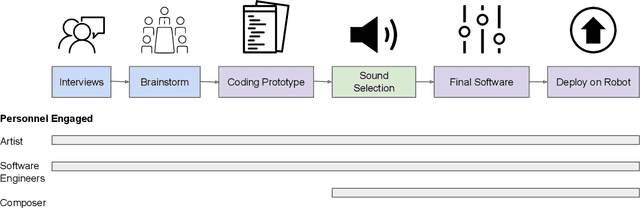
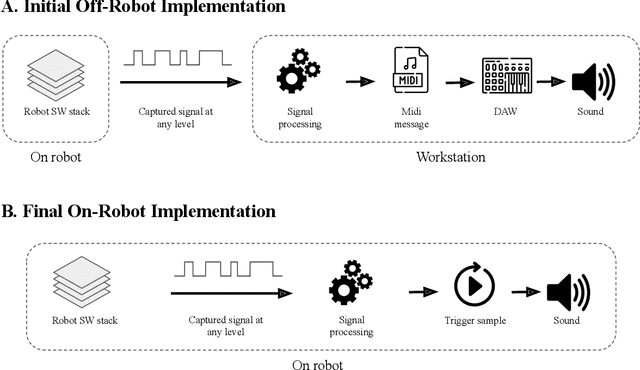
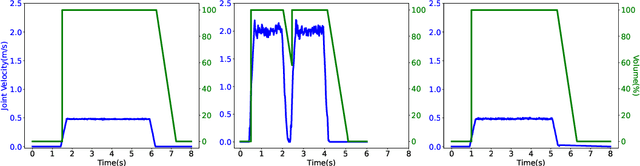
As robots enter everyday spaces like offices, the sounds they create affect how they are perceived. We present "Music Mode", a novel mapping between a robot's joint motions and sounds, programmed by artists and engineers to make the robot generate music as it moves. Two experiments were designed to characterize the effect of this musical augmentation on human users. In the first experiment, a robot performed three tasks while playing three different sound mappings. Results showed that participants observing the robot perceived it as more safe, animate, intelligent, anthropomorphic, and likable when playing the Music Mode Orchestral software. To test whether the results of the first experiment were due to the Music Mode algorithm, rather than music alone, we conducted a second experiment. Here the robot performed the same three tasks, while a participant observed via video, but the Orchestral music was either linked to its movement or random. Participants rated the robots as more intelligent when the music was linked to the movement. Robots using Music Mode logged approximately two hundred hours of operation while navigating, wiping tables, and sorting trash, and bystander comments made during this operating time served as an embedded case study. The contributions are: (1) an interdisciplinary choreographic, musical, and coding design process to develop a real-world robot sound feature, (2) a technical implementation for movement-based sound generation, and (3) two experiments and an embedded case study of robots running this feature during daily work activities that resulted in increased likeability and perceived intelligence of the robot.
Leveraging Haptic Feedback to Improve Data Quality and Quantity for Deep Imitation Learning Models
Nov 06, 2022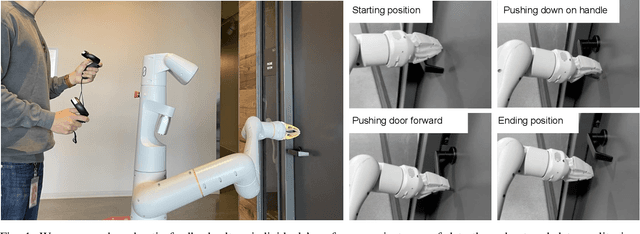
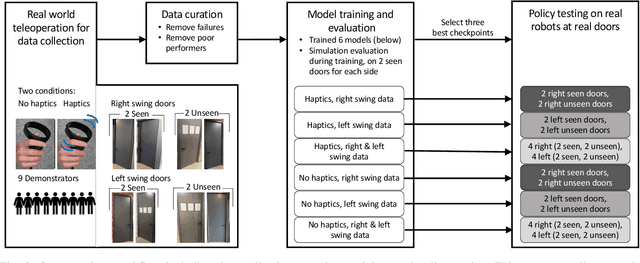
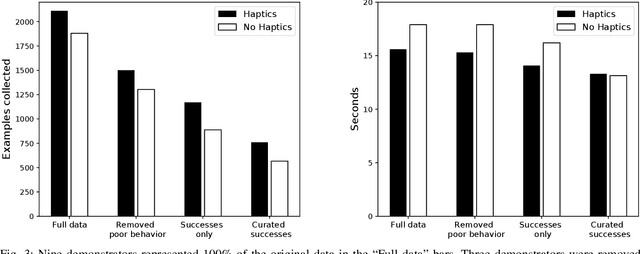
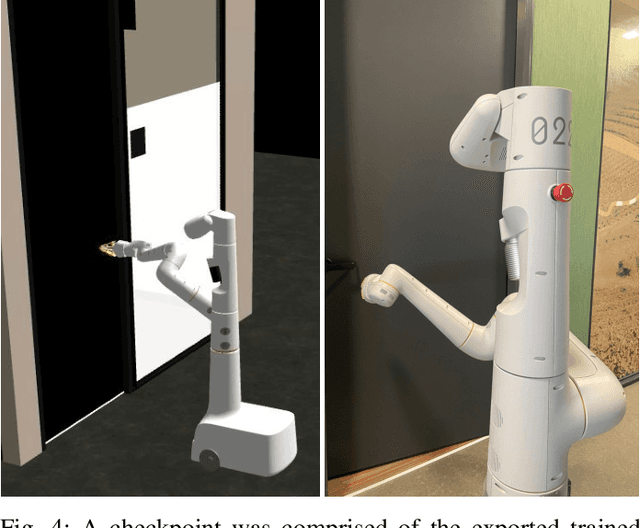
Learning from demonstration (LfD) is a proven technique to teach robots new skills. Data quality and quantity play a critical role in LfD trained model performance. In this paper we analyze the effect of enhancing an existing teleoperation data collection system with real-time haptic feedback; we observe improvements in the collected data throughput and its quality for model training. Our experiment testbed was a mobile manipulator robot that opened doors with latch handles. Evaluation of teleoperated data collection on eight real world conference room doors found that adding the haptic feedback improved the data throughput by 6%. We additionally used the collected data to train six image-based deep imitation learning models, three with haptic feedback and three without it. These models were used to implement autonomous door-opening with the same type of robot used during data collection. Our results show that a policy from a behavior cloning model trained with haptic data performed on average 11% better than its counterpart with no haptic feedback data, indicating that haptic feedback resulted in collection of a higher quality dataset.
Gesture2Path: Imitation Learning for Gesture-aware Navigation
Sep 19, 2022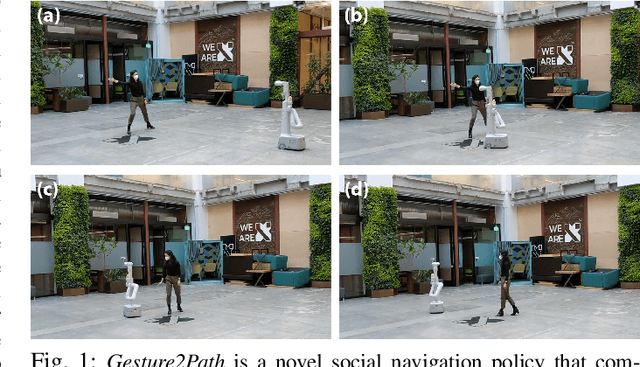
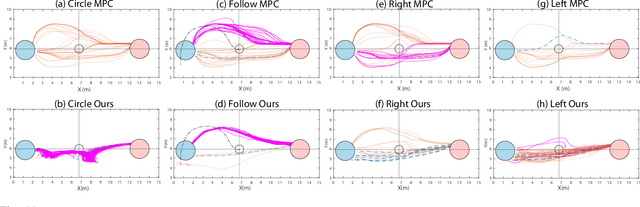
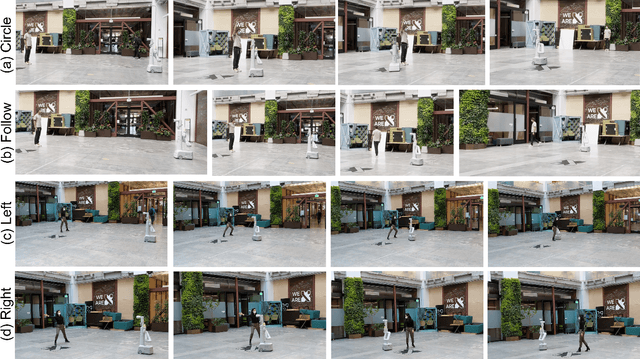
As robots increasingly enter human-centered environments, they must not only be able to navigate safely around humans, but also adhere to complex social norms. Humans often rely on non-verbal communication through gestures and facial expressions when navigating around other people, especially in densely occupied spaces. Consequently, robots also need to be able to interpret gestures as part of solving social navigation tasks. To this end, we present Gesture2Path, a novel social navigation approach that combines image-based imitation learning with model-predictive control. Gestures are interpreted based on a neural network that operates on streams of images, while we use a state-of-the-art model predictive control algorithm to solve point-to-point navigation tasks. We deploy our method on real robots and showcase the effectiveness of our approach for the four gestures-navigation scenarios: left/right, follow me, and make a circle. Our experiments indicate that our method is able to successfully interpret complex human gestures and to use them as a signal to generate socially compliant trajectories for navigation tasks. We validated our method based on in-situ ratings of participants interacting with the robots.
Choreographic and Somatic Approaches for the Development of Expressive Robotic Systems
Dec 21, 2017
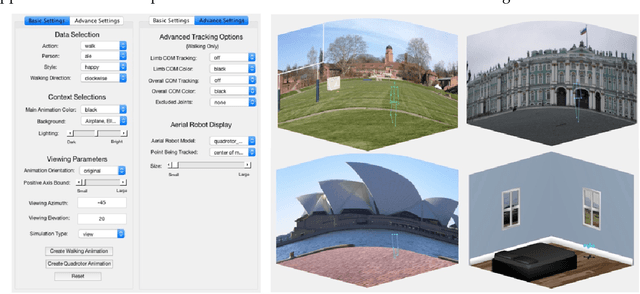

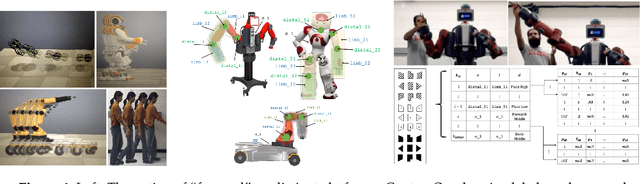
As robotic systems are moved out of factory work cells into human-facing environments questions of choreography become central to their design, placement, and application. With a human viewer or counterpart present, a system will automatically be interpreted within context, style of movement, and form factor by human beings as animate elements of their environment. The interpretation by this human counterpart is critical to the success of the system's integration: knobs on the system need to make sense to a human counterpart; an artificial agent should have a way of notifying a human counterpart of a change in system state, possibly through motion profiles; and the motion of a human counterpart may have important contextual clues for task completion. Thus, professional choreographers, dance practitioners, and movement analysts are critical to research in robotics. They have design methods for movement that align with human audience perception, can identify simplified features of movement for human-robot interaction goals, and have detailed knowledge of the capacity of human movement. This article provides approaches employed by one research lab, specific impacts on technical and artistic projects within, and principles that may guide future such work. The background section reports on choreography, somatic perspectives, improvisation, the Laban/Bartenieff Movement System, and robotics. From this context methods including embodied exercises, writing prompts, and community building activities have been developed to facilitate interdisciplinary research. The results of this work is presented as an overview of a smattering of projects in areas like high-level motion planning, software development for rapid prototyping of movement, artistic output, and user studies that help understand how people interpret movement. Finally, guiding principles for other groups to adopt are posited.