 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteractive Multi-Robot Flocking with Gesture Responsiveness and Musical Accompaniment
Mar 30, 2024For decades, robotics researchers have pursued various tasks for multi-robot systems, from cooperative manipulation to search and rescue. These tasks are multi-robot extensions of classical robotic tasks and often optimized on dimensions such as speed or efficiency. As robots transition from commercial and research settings into everyday environments, social task aims such as engagement or entertainment become increasingly relevant. This work presents a compelling multi-robot task, in which the main aim is to enthrall and interest. In this task, the goal is for a human to be drawn to move alongside and participate in a dynamic, expressive robot flock. Towards this aim, the research team created algorithms for robot movements and engaging interaction modes such as gestures and sound. The contributions are as follows: (1) a novel group navigation algorithm involving human and robot agents, (2) a gesture responsive algorithm for real-time, human-robot flocking interaction, (3) a weight mode characterization system for modifying flocking behavior, and (4) a method of encoding a choreographer's preferences inside a dynamic, adaptive, learned system. An experiment was performed to understand individual human behavior while interacting with the flock under three conditions: weight modes selected by a human choreographer, a learned model, or subset list. Results from the experiment showed that the perception of the experience was not influenced by the weight mode selection. This work elucidates how differing task aims such as engagement manifest in multi-robot system design and execution, and broadens the domain of multi-robot tasks.
Deep RL at Scale: Sorting Waste in Office Buildings with a Fleet of Mobile Manipulators
May 05, 2023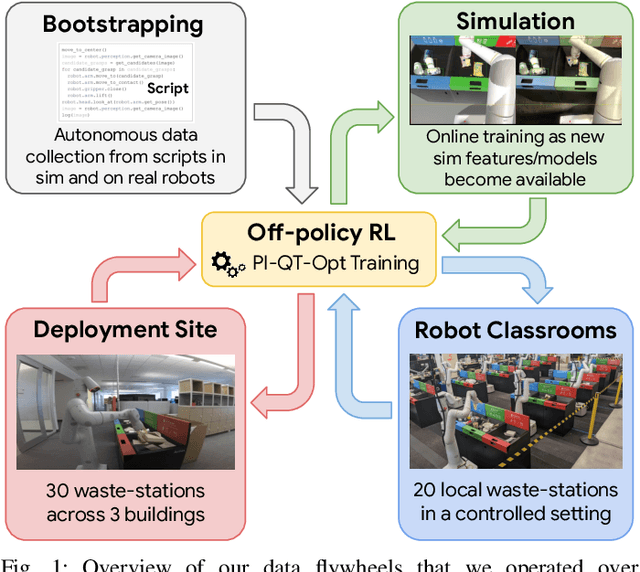
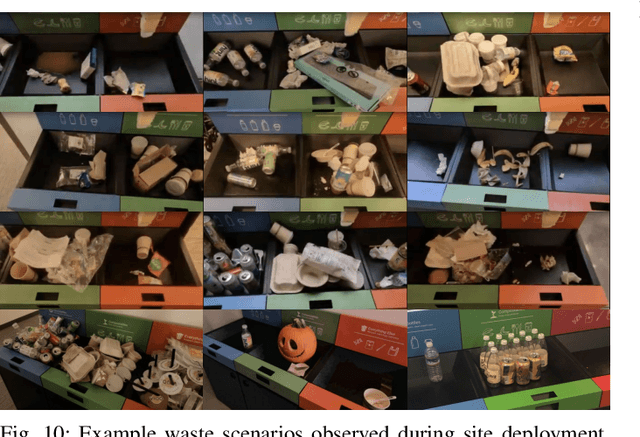
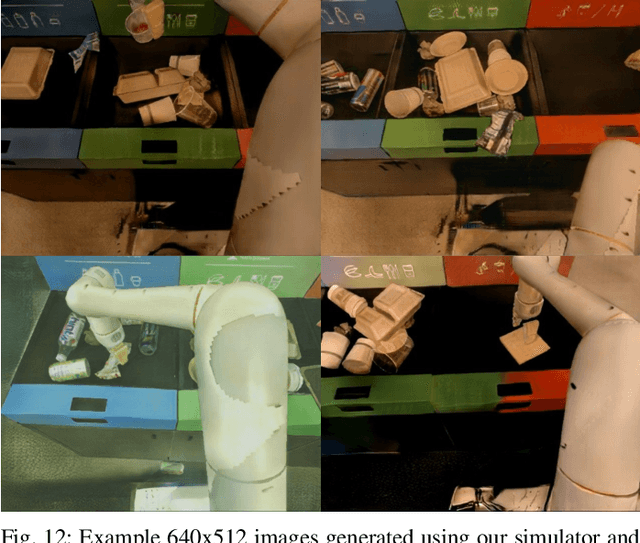
We describe a system for deep reinforcement learning of robotic manipulation skills applied to a large-scale real-world task: sorting recyclables and trash in office buildings. Real-world deployment of deep RL policies requires not only effective training algorithms, but the ability to bootstrap real-world training and enable broad generalization. To this end, our system combines scalable deep RL from real-world data with bootstrapping from training in simulation, and incorporates auxiliary inputs from existing computer vision systems as a way to boost generalization to novel objects, while retaining the benefits of end-to-end training. We analyze the tradeoffs of different design decisions in our system, and present a large-scale empirical validation that includes training on real-world data gathered over the course of 24 months of experimentation, across a fleet of 23 robots in three office buildings, with a total training set of 9527 hours of robotic experience. Our final validation also consists of 4800 evaluation trials across 240 waste station configurations, in order to evaluate in detail the impact of the design decisions in our system, the scaling effects of including more real-world data, and the performance of the method on novel objects. The projects website and videos can be found at \href{http://rl-at-scale.github.io}{rl-at-scale.github.io}.
Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization
Oct 19, 2022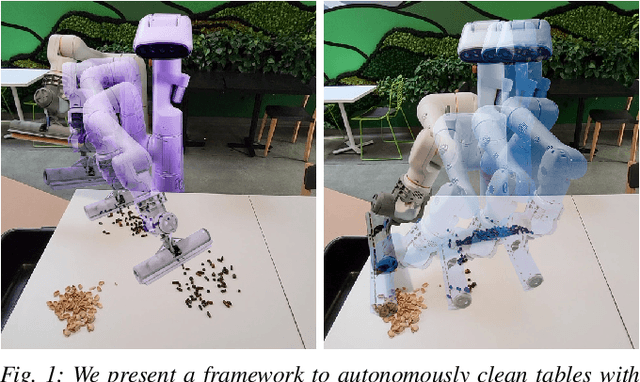
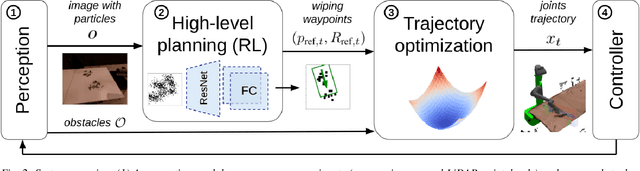
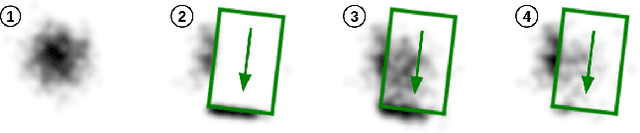
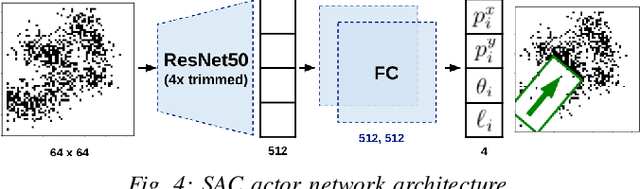
We propose a framework to enable multipurpose assistive mobile robots to autonomously wipe tables to clean spills and crumbs. This problem is challenging, as it requires planning wiping actions while reasoning over uncertain latent dynamics of crumbs and spills captured via high-dimensional visual observations. Simultaneously, we must guarantee constraints satisfaction to enable safe deployment in unstructured cluttered environments. To tackle this problem, we first propose a stochastic differential equation to model crumbs and spill dynamics and absorption with a robot wiper. Using this model, we train a vision-based policy for planning wiping actions in simulation using reinforcement learning (RL). To enable zero-shot sim-to-real deployment, we dovetail the RL policy with a whole-body trajectory optimization framework to compute base and arm joint trajectories that execute the desired wiping motions while guaranteeing constraints satisfaction. We extensively validate our approach in simulation and on hardware. Video: https://youtu.be/inORKP4F3EI