 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini Robotics: Bringing AI into the Physical World
Mar 25, 2025Recent advancements in large multimodal models have led to the emergence of remarkable generalist capabilities in digital domains, yet their translation to physical agents such as robots remains a significant challenge. This report introduces a new family of AI models purposefully designed for robotics and built upon the foundation of Gemini 2.0. We present Gemini Robotics, an advanced Vision-Language-Action (VLA) generalist model capable of directly controlling robots. Gemini Robotics executes smooth and reactive movements to tackle a wide range of complex manipulation tasks while also being robust to variations in object types and positions, handling unseen environments as well as following diverse, open vocabulary instructions. We show that with additional fine-tuning, Gemini Robotics can be specialized to new capabilities including solving long-horizon, highly dexterous tasks, learning new short-horizon tasks from as few as 100 demonstrations and adapting to completely novel robot embodiments. This is made possible because Gemini Robotics builds on top of the Gemini Robotics-ER model, the second model we introduce in this work. Gemini Robotics-ER (Embodied Reasoning) extends Gemini's multimodal reasoning capabilities into the physical world, with enhanced spatial and temporal understanding. This enables capabilities relevant to robotics including object detection, pointing, trajectory and grasp prediction, as well as multi-view correspondence and 3D bounding box predictions. We show how this novel combination can support a variety of robotics applications. We also discuss and address important safety considerations related to this new class of robotics foundation models. The Gemini Robotics family marks a substantial step towards developing general-purpose robots that realizes AI's potential in the physical world.
Learning to Learn Faster from Human Feedback with Language Model Predictive Control
Feb 18, 2024



Large language models (LLMs) have been shown to exhibit a wide range of capabilities, such as writing robot code from language commands -- enabling non-experts to direct robot behaviors, modify them based on feedback, or compose them to perform new tasks. However, these capabilities (driven by in-context learning) are limited to short-term interactions, where users' feedback remains relevant for only as long as it fits within the context size of the LLM, and can be forgotten over longer interactions. In this work, we investigate fine-tuning the robot code-writing LLMs, to remember their in-context interactions and improve their teachability i.e., how efficiently they adapt to human inputs (measured by average number of corrections before the user considers the task successful). Our key observation is that when human-robot interactions are formulated as a partially observable Markov decision process (in which human language inputs are observations, and robot code outputs are actions), then training an LLM to complete previous interactions can be viewed as training a transition dynamics model -- that can be combined with classic robotics techniques such as model predictive control (MPC) to discover shorter paths to success. This gives rise to Language Model Predictive Control (LMPC), a framework that fine-tunes PaLM 2 to improve its teachability on 78 tasks across 5 robot embodiments -- improving non-expert teaching success rates of unseen tasks by 26.9% while reducing the average number of human corrections from 2.4 to 1.9. Experiments show that LMPC also produces strong meta-learners, improving the success rate of in-context learning new tasks on unseen robot embodiments and APIs by 31.5%. See videos, code, and demos at: https://robot-teaching.github.io/.
AutoRT: Embodied Foundation Models for Large Scale Orchestration of Robotic Agents
Jan 23, 2024Foundation models that incorporate language, vision, and more recently actions have revolutionized the ability to harness internet scale data to reason about useful tasks. However, one of the key challenges of training embodied foundation models is the lack of data grounded in the physical world. In this paper, we propose AutoRT, a system that leverages existing foundation models to scale up the deployment of operational robots in completely unseen scenarios with minimal human supervision. AutoRT leverages vision-language models (VLMs) for scene understanding and grounding, and further uses large language models (LLMs) for proposing diverse and novel instructions to be performed by a fleet of robots. Guiding data collection by tapping into the knowledge of foundation models enables AutoRT to effectively reason about autonomy tradeoffs and safety while significantly scaling up data collection for robot learning. We demonstrate AutoRT proposing instructions to over 20 robots across multiple buildings and collecting 77k real robot episodes via both teleoperation and autonomous robot policies. We experimentally show that such "in-the-wild" data collected by AutoRT is significantly more diverse, and that AutoRT's use of LLMs allows for instruction following data collection robots that can align to human preferences.
SARA-RT: Scaling up Robotics Transformers with Self-Adaptive Robust Attention
Dec 04, 2023



We present Self-Adaptive Robust Attention for Robotics Transformers (SARA-RT): a new paradigm for addressing the emerging challenge of scaling up Robotics Transformers (RT) for on-robot deployment. SARA-RT relies on the new method of fine-tuning proposed by us, called up-training. It converts pre-trained or already fine-tuned Transformer-based robotic policies of quadratic time complexity (including massive billion-parameter vision-language-action models or VLAs), into their efficient linear-attention counterparts maintaining high quality. We demonstrate the effectiveness of SARA-RT by speeding up: (a) the class of recently introduced RT-2 models, the first VLA robotic policies pre-trained on internet-scale data, as well as (b) Point Cloud Transformer (PCT) robotic policies operating on large point clouds. We complement our results with the rigorous mathematical analysis providing deeper insight into the phenomenon of SARA.
RT-Trajectory: Robotic Task Generalization via Hindsight Trajectory Sketches
Nov 06, 2023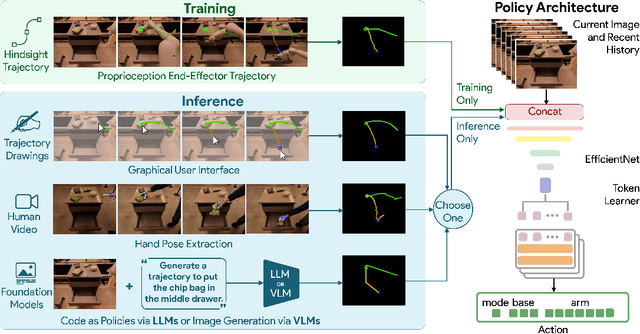
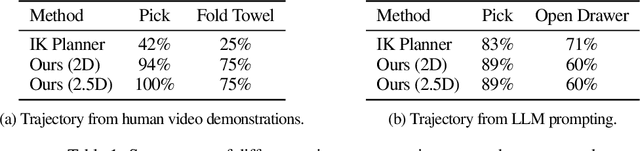
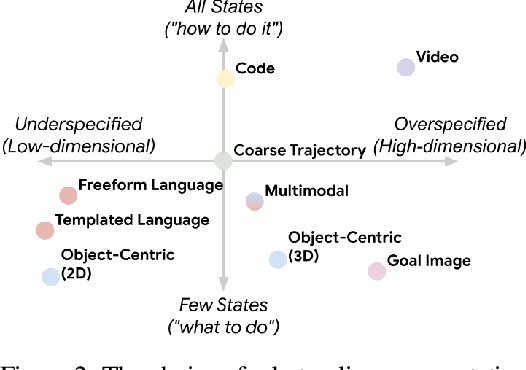
Generalization remains one of the most important desiderata for robust robot learning systems. While recently proposed approaches show promise in generalization to novel objects, semantic concepts, or visual distribution shifts, generalization to new tasks remains challenging. For example, a language-conditioned policy trained on pick-and-place tasks will not be able to generalize to a folding task, even if the arm trajectory of folding is similar to pick-and-place. Our key insight is that this kind of generalization becomes feasible if we represent the task through rough trajectory sketches. We propose a policy conditioning method using such rough trajectory sketches, which we call RT-Trajectory, that is practical, easy to specify, and allows the policy to effectively perform new tasks that would otherwise be challenging to perform. We find that trajectory sketches strike a balance between being detailed enough to express low-level motion-centric guidance while being coarse enough to allow the learned policy to interpret the trajectory sketch in the context of situational visual observations. In addition, we show how trajectory sketches can provide a useful interface to communicate with robotic policies: they can be specified through simple human inputs like drawings or videos, or through automated methods such as modern image-generating or waypoint-generating methods. We evaluate RT-Trajectory at scale on a variety of real-world robotic tasks, and find that RT-Trajectory is able to perform a wider range of tasks compared to language-conditioned and goal-conditioned policies, when provided the same training data.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



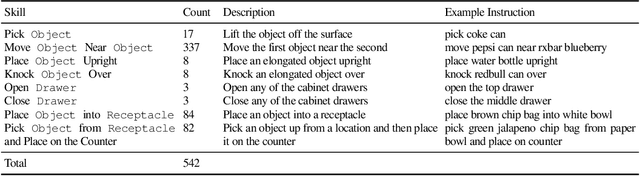
Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
Protecting Sensitive Data through Federated Co-Training
Oct 09, 2023



In many critical applications, sensitive data is inherently distributed. Federated learning trains a model collaboratively by aggregating the parameters of locally trained models. This avoids exposing sensitive local data. It is possible, though, to infer upon the sensitive data from the shared model parameters. At the same time, many types of machine learning models do not lend themselves to parameter aggregation, such as decision trees, or rule ensembles. It has been observed that in many applications, in particular healthcare, large unlabeled datasets are publicly available. They can be used to exchange information between clients by distributed distillation, i.e., co-regularizing local training via the discrepancy between the soft predictions of each local client on the unlabeled dataset. This, however, still discloses private information and restricts the types of models to those trainable via gradient-based methods. We propose to go one step further and use a form of federated co-training, where local hard labels on the public unlabeled datasets are shared and aggregated into a consensus label. This consensus label can be used for local training by any supervised machine learning model. We show that this federated co-training approach achieves a model quality comparable to both federated learning and distributed distillation on a set of benchmark datasets and real-world medical datasets. It improves privacy over both approaches, protecting against common membership inference attacks to the highest degree. Furthermore, we show that federated co-training can collaboratively train interpretable models, such as decision trees and rule ensembles, achieving a model quality comparable to centralized training.
Q-Transformer: Scalable Offline Reinforcement Learning via Autoregressive Q-Functions
Sep 18, 2023



In this work, we present a scalable reinforcement learning method for training multi-task policies from large offline datasets that can leverage both human demonstrations and autonomously collected data. Our method uses a Transformer to provide a scalable representation for Q-functions trained via offline temporal difference backups. We therefore refer to the method as Q-Transformer. By discretizing each action dimension and representing the Q-value of each action dimension as separate tokens, we can apply effective high-capacity sequence modeling techniques for Q-learning. We present several design decisions that enable good performance with offline RL training, and show that Q-Transformer outperforms prior offline RL algorithms and imitation learning techniques on a large diverse real-world robotic manipulation task suite. The project's website and videos can be found at https://q-transformer.github.io
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Jul 28, 2023We study how vision-language models trained on Internet-scale data can be incorporated directly into end-to-end robotic control to boost generalization and enable emergent semantic reasoning. Our goal is to enable a single end-to-end trained model to both learn to map robot observations to actions and enjoy the benefits of large-scale pretraining on language and vision-language data from the web. To this end, we propose to co-fine-tune state-of-the-art vision-language models on both robotic trajectory data and Internet-scale vision-language tasks, such as visual question answering. In contrast to other approaches, we propose a simple, general recipe to achieve this goal: in order to fit both natural language responses and robotic actions into the same format, we express the actions as text tokens and incorporate them directly into the training set of the model in the same way as natural language tokens. We refer to such category of models as vision-language-action models (VLA) and instantiate an example of such a model, which we call RT-2. Our extensive evaluation (6k evaluation trials) shows that our approach leads to performant robotic policies and enables RT-2 to obtain a range of emergent capabilities from Internet-scale training. This includes significantly improved generalization to novel objects, the ability to interpret commands not present in the robot training data (such as placing an object onto a particular number or icon), and the ability to perform rudimentary reasoning in response to user commands (such as picking up the smallest or largest object, or the one closest to another object). We further show that incorporating chain of thought reasoning allows RT-2 to perform multi-stage semantic reasoning, for example figuring out which object to pick up for use as an improvised hammer (a rock), or which type of drink is best suited for someone who is tired (an energy drink).
Large Language Models as General Pattern Machines
Jul 10, 2023



We observe that pre-trained large language models (LLMs) are capable of autoregressively completing complex token sequences -- from arbitrary ones procedurally generated by probabilistic context-free grammars (PCFG), to more rich spatial patterns found in the Abstract Reasoning Corpus (ARC), a general AI benchmark, prompted in the style of ASCII art. Surprisingly, pattern completion proficiency can be partially retained even when the sequences are expressed using tokens randomly sampled from the vocabulary. These results suggest that without any additional training, LLMs can serve as general sequence modelers, driven by in-context learning. In this work, we investigate how these zero-shot capabilities may be applied to problems in robotics -- from extrapolating sequences of numbers that represent states over time to complete simple motions, to least-to-most prompting of reward-conditioned trajectories that can discover and represent closed-loop policies (e.g., a stabilizing controller for CartPole). While difficult to deploy today for real systems due to latency, context size limitations, and compute costs, the approach of using LLMs to drive low-level control may provide an exciting glimpse into how the patterns among words could be transferred to actions.