 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGIANTS: Generative Insight Anticipation from Scientific Literature
Apr 10, 2026Scientific breakthroughs often emerge from synthesizing prior ideas into novel contributions. While language models (LMs) show promise in scientific discovery, their ability to perform this targeted, literature-grounded synthesis remains underexplored. We introduce insight anticipation, a generation task in which a model predicts a downstream paper's core insight from its foundational parent papers. To evaluate this capability, we develop GiantsBench, a benchmark of 17k examples across eight scientific domains, where each example consists of a set of parent papers paired with the core insight of a downstream paper. We evaluate models using an LM judge that scores similarity between generated and ground-truth insights, and show that these similarity scores correlate with expert human ratings. Finally, we present GIANTS-4B, an LM trained via reinforcement learning (RL) to optimize insight anticipation using these similarity scores as a proxy reward. Despite its smaller open-source architecture, GIANTS-4B outperforms proprietary baselines and generalizes to unseen domains, achieving a 34% relative improvement in similarity score over gemini-3-pro. Human evaluations further show that GIANTS-4B produces insights that are more conceptually clear than those of the base model. In addition, SciJudge-30B, a third-party model trained to compare research abstracts by likely citation impact, predicts that insights generated by GIANTS-4B are more likely to lead to higher citations, preferring them over the base model in 68% of pairwise comparisons. We release our code, benchmark, and model to support future research in automated scientific discovery.
MLE-Smith: Scaling MLE Tasks with Automated Multi-Agent Pipeline
Oct 08, 2025While Language Models (LMs) have made significant progress in automating machine learning engineering (MLE), the acquisition of high-quality MLE training data is significantly constrained. Current MLE benchmarks suffer from low scalability and limited applicability because they rely on static, manually curated tasks, demanding extensive time and manual effort to produce. We introduce MLE-Smith, a fully automated multi-agent pipeline, to transform raw datasets into competition-style MLE challenges through an efficient generate-verify-execute paradigm for scaling MLE tasks with verifiable quality, real-world usability, and rich diversity. The proposed multi-agent pipeline in MLE-Smith drives structured task design and standardized refactoring, coupled with a hybrid verification mechanism that enforces strict structural rules and high-level semantic soundness. It further validates empirical solvability and real-world fidelity through interactive execution. We apply MLE-Smith to 224 of real-world datasets and generate 606 tasks spanning multiple categories, objectives, and modalities, demonstrating that MLE-Smith can work effectively across a wide range of real-world datasets. Evaluation on the generated tasks shows that the performance of eight mainstream and cutting-edge LLMs on MLE-Smith tasks is strongly correlated with their performance on carefully human-designed tasks, highlighting the effectiveness of the MLE-Smith to scaling up MLE tasks, while maintaining task quality.
RLAD: Training LLMs to Discover Abstractions for Solving Reasoning Problems
Oct 02, 2025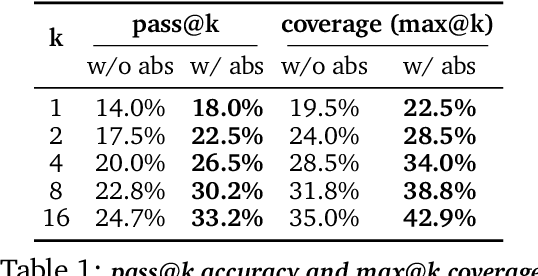
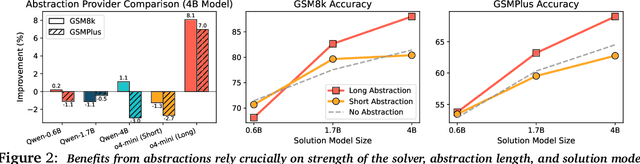
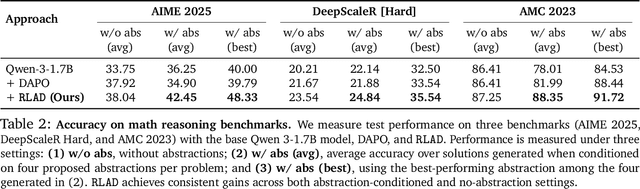
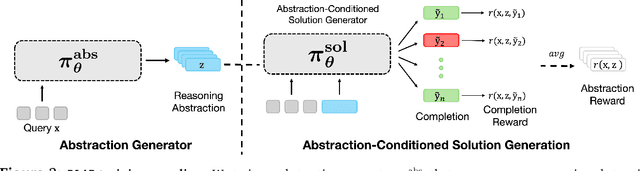
Reasoning requires going beyond pattern matching or memorization of solutions to identify and implement "algorithmic procedures" that can be used to deduce answers to hard problems. Doing so requires realizing the most relevant primitives, intermediate results, or shared procedures, and building upon them. While RL post-training on long chains of thought ultimately aims to uncover this kind of algorithmic behavior, most reasoning traces learned by large models fail to consistently capture or reuse procedures, instead drifting into verbose and degenerate exploration. To address more effective reasoning, we introduce reasoning abstractions: concise natural language descriptions of procedural and factual knowledge that guide the model toward learning successful reasoning. We train models to be capable of proposing multiple abstractions given a problem, followed by RL that incentivizes building a solution while using the information provided by these abstractions. This results in a two-player RL training paradigm, abbreviated as RLAD, that jointly trains an abstraction generator and a solution generator. This setup effectively enables structured exploration, decouples learning signals of abstraction proposal and solution generation, and improves generalization to harder problems. We also show that allocating more test-time compute to generating abstractions is more beneficial for performance than generating more solutions at large test budgets, illustrating the role of abstractions in guiding meaningful exploration.
Cognitive Behaviors that Enable Self-Improving Reasoners, or, Four Habits of Highly Effective STaRs
Mar 03, 2025



Test-time inference has emerged as a powerful paradigm for enabling language models to ``think'' longer and more carefully about complex challenges, much like skilled human experts. While reinforcement learning (RL) can drive self-improvement in language models on verifiable tasks, some models exhibit substantial gains while others quickly plateau. For instance, we find that Qwen-2.5-3B far exceeds Llama-3.2-3B under identical RL training for the game of Countdown. This discrepancy raises a critical question: what intrinsic properties enable effective self-improvement? We introduce a framework to investigate this question by analyzing four key cognitive behaviors -- verification, backtracking, subgoal setting, and backward chaining -- that both expert human problem solvers and successful language models employ. Our study reveals that Qwen naturally exhibits these reasoning behaviors, whereas Llama initially lacks them. In systematic experimentation with controlled behavioral datasets, we find that priming Llama with examples containing these reasoning behaviors enables substantial improvements during RL, matching or exceeding Qwen's performance. Importantly, the presence of reasoning behaviors, rather than correctness of answers, proves to be the critical factor -- models primed with incorrect solutions containing proper reasoning patterns achieve comparable performance to those trained on correct solutions. Finally, leveraging continued pretraining with OpenWebMath data, filtered to amplify reasoning behaviors, enables the Llama model to match Qwen's self-improvement trajectory. Our findings establish a fundamental relationship between initial reasoning behaviors and the capacity for improvement, explaining why some language models effectively utilize additional computation while others plateau.
FSPO: Few-Shot Preference Optimization of Synthetic Preference Data in LLMs Elicits Effective Personalization to Real Users
Feb 26, 2025Effective personalization of LLMs is critical for a broad range of user-interfacing applications such as virtual assistants and content curation. Inspired by the strong in-context learning capabilities of LLMs, we propose Few-Shot Preference Optimization (FSPO), which reframes reward modeling as a meta-learning problem. Under this framework, an LLM learns to quickly adapt to a user via a few labeled preferences from that user, constructing a personalized reward function for them. Additionally, since real-world preference data is scarce and challenging to collect at scale, we propose careful design choices to construct synthetic preference datasets for personalization, generating over 1M synthetic personalized preferences using publicly available LLMs. In particular, to successfully transfer from synthetic data to real users, we find it crucial for the data to exhibit both high diversity and coherent, self-consistent structure. We evaluate FSPO on personalized open-ended generation for up to 1,500 synthetic users across across three domains: movie reviews, pedagogical adaptation based on educational background, and general question answering, along with a controlled human study. Overall, FSPO achieves an 87% Alpaca Eval winrate on average in generating responses that are personalized to synthetic users and a 72% winrate with real human users in open-ended question answering.
Big-Math: A Large-Scale, High-Quality Math Dataset for Reinforcement Learning in Language Models
Feb 24, 2025Increasing interest in reasoning models has led math to become a prominent testing ground for algorithmic and methodological improvements. However, existing open math datasets either contain a small collection of high-quality, human-written problems or a large corpus of machine-generated problems of uncertain quality, forcing researchers to choose between quality and quantity. In this work, we present Big-Math, a dataset of over 250,000 high-quality math questions with verifiable answers, purposefully made for reinforcement learning (RL). To create Big-Math, we rigorously filter, clean, and curate openly available datasets, extracting questions that satisfy our three desiderata: (1) problems with uniquely verifiable solutions, (2) problems that are open-ended, (3) and problems with a closed-form solution. To ensure the quality of Big-Math, we manually verify each step in our filtering process. Based on the findings from our filtering process, we introduce 47,000 new questions with verified answers, Big-Math-Reformulated: closed-ended questions (i.e. multiple choice questions) that have been reformulated as open-ended questions through a systematic reformulation algorithm. Compared to the most commonly used existing open-source datasets for math reasoning, GSM8k and MATH, Big-Math is an order of magnitude larger, while our rigorous filtering ensures that we maintain the questions most suitable for RL. We also provide a rigorous analysis of the dataset, finding that Big-Math contains a high degree of diversity across problem domains, and incorporates a wide range of problem difficulties, enabling a wide range of downstream uses for models of varying capabilities and training requirements. By bridging the gap between data quality and quantity, Big-Math establish a robust foundation for advancing reasoning in LLMs.
Personalized Preference Fine-tuning of Diffusion Models
Jan 11, 2025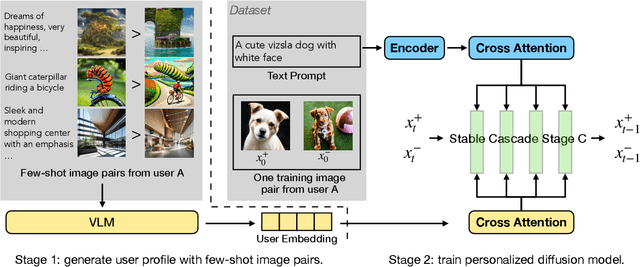
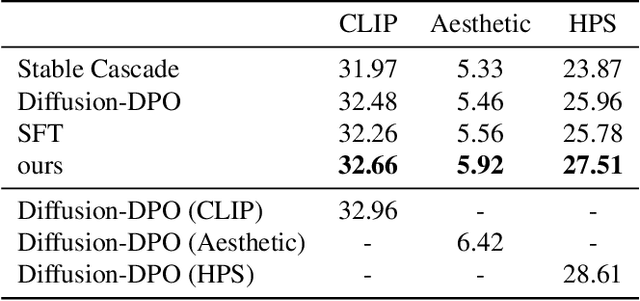
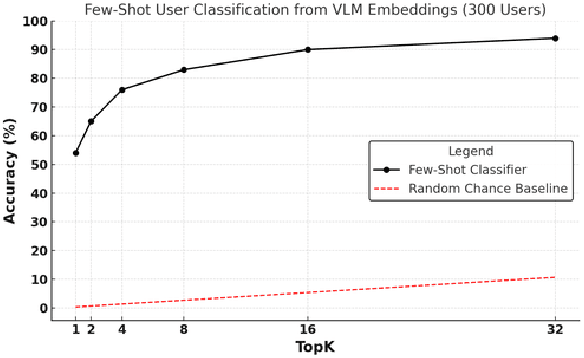
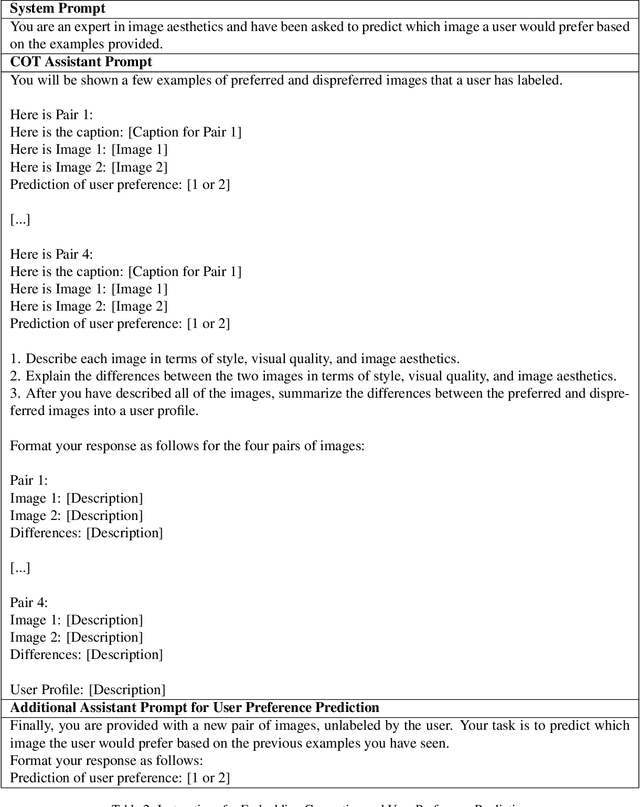
RLHF techniques like DPO can significantly improve the generation quality of text-to-image diffusion models. However, these methods optimize for a single reward that aligns model generation with population-level preferences, neglecting the nuances of individual users' beliefs or values. This lack of personalization limits the efficacy of these models. To bridge this gap, we introduce PPD, a multi-reward optimization objective that aligns diffusion models with personalized preferences. With PPD, a diffusion model learns the individual preferences of a population of users in a few-shot way, enabling generalization to unseen users. Specifically, our approach (1) leverages a vision-language model (VLM) to extract personal preference embeddings from a small set of pairwise preference examples, and then (2) incorporates the embeddings into diffusion models through cross attention. Conditioning on user embeddings, the text-to-image models are fine-tuned with the DPO objective, simultaneously optimizing for alignment with the preferences of multiple users. Empirical results demonstrate that our method effectively optimizes for multiple reward functions and can interpolate between them during inference. In real-world user scenarios, with as few as four preference examples from a new user, our approach achieves an average win rate of 76\% over Stable Cascade, generating images that more accurately reflect specific user preferences.
Towards System 2 Reasoning in LLMs: Learning How to Think With Meta Chain-of-Thought
Jan 08, 2025
We propose a novel framework, Meta Chain-of-Thought (Meta-CoT), which extends traditional Chain-of-Thought (CoT) by explicitly modeling the underlying reasoning required to arrive at a particular CoT. We present empirical evidence from state-of-the-art models exhibiting behaviors consistent with in-context search, and explore methods for producing Meta-CoT via process supervision, synthetic data generation, and search algorithms. Finally, we outline a concrete pipeline for training a model to produce Meta-CoTs, incorporating instruction tuning with linearized search traces and reinforcement learning post-training. Finally, we discuss open research questions, including scaling laws, verifier roles, and the potential for discovering novel reasoning algorithms. This work provides a theoretical and practical roadmap to enable Meta-CoT in LLMs, paving the way for more powerful and human-like reasoning in artificial intelligence.
Test-Time Alignment via Hypothesis Reweighting
Dec 11, 2024Large pretrained models often struggle with underspecified tasks -- situations where the training data does not fully define the desired behavior. For example, chatbots must handle diverse and often conflicting user preferences, requiring adaptability to various user needs. We propose a novel framework to address the general challenge of aligning models to test-time user intent, which is rarely fully specified during training. Our approach involves training an efficient ensemble, i.e., a single neural network with multiple prediction heads, each representing a different function consistent with the training data. Our main contribution is HyRe, a simple adaptation technique that dynamically reweights ensemble members at test time using a small set of labeled examples from the target distribution, which can be labeled in advance or actively queried from a larger unlabeled pool. By leveraging recent advances in scalable ensemble training, our method scales to large pretrained models, with computational costs comparable to fine-tuning a single model. We empirically validate HyRe in several underspecified scenarios, including personalization tasks and settings with distribution shifts. Additionally, with just five preference pairs from each target distribution, the same ensemble adapted via HyRe outperforms the prior state-of-the-art 2B-parameter reward model accuracy across 18 evaluation distributions.
Adaptive Inference-Time Compute: LLMs Can Predict if They Can Do Better, Even Mid-Generation
Oct 03, 2024Inference-time computation is a powerful paradigm to enhance the performance of large language models (LLMs), with Best-of-N sampling being a widely used technique. However, this method is computationally expensive, requiring both (1) an external reward model and (2) the generation of multiple samples. In this work, we introduce a new generative self-evaluation scheme designed to adaptively reduce the number of generated samples while maintaining or even improving performance. We use a generative reward model formulation, allowing the LLM to predict mid-generation the probability that restarting the generation will yield a better response. These predictions are obtained without an external reward model and can be used to decide whether or not to generate more samples, prune unpromising samples early on, or to pick the best sample. This capability is very inexpensive as it involves generating a single predefined token. Trained using a dataset constructed with real unfiltered LMSYS user prompts, Llama 3.1 8B's win rate against GPT-4 on AlpacaEval increases from 21% to 34% with 16 samples and math performance on GSM8K improves from 84% to 91%. By sampling only when the LLM determines that it is beneficial to do so and adaptively adjusting temperature annealing, we demonstrate that 74% of the improvement from using 16 samples can be achieved with only 1.2 samples on average. We further demonstrate that 50-75% of samples can be pruned early in generation with minimal degradation in performance. Overall, our methods enable more efficient and scalable compute utilization during inference for LLMs.