 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD5RL: Diverse Datasets for Data-Driven Deep Reinforcement Learning
Aug 15, 2024
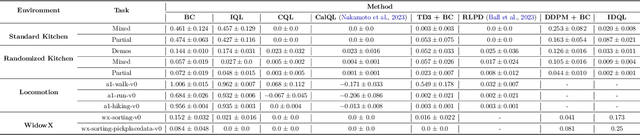
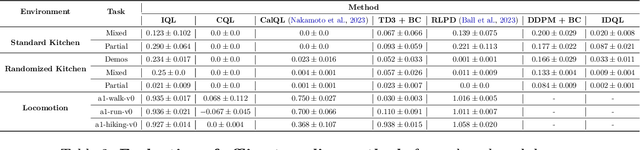
Offline reinforcement learning algorithms hold the promise of enabling data-driven RL methods that do not require costly or dangerous real-world exploration and benefit from large pre-collected datasets. This in turn can facilitate real-world applications, as well as a more standardized approach to RL research. Furthermore, offline RL methods can provide effective initializations for online finetuning to overcome challenges with exploration. However, evaluating progress on offline RL algorithms requires effective and challenging benchmarks that capture properties of real-world tasks, provide a range of task difficulties, and cover a range of challenges both in terms of the parameters of the domain (e.g., length of the horizon, sparsity of rewards) and the parameters of the data (e.g., narrow demonstration data or broad exploratory data). While considerable progress in offline RL in recent years has been enabled by simpler benchmark tasks, the most widely used datasets are increasingly saturating in performance and may fail to reflect properties of realistic tasks. We propose a new benchmark for offline RL that focuses on realistic simulations of robotic manipulation and locomotion environments, based on models of real-world robotic systems, and comprising a variety of data sources, including scripted data, play-style data collected by human teleoperators, and other data sources. Our proposed benchmark covers state-based and image-based domains, and supports both offline RL and online fine-tuning evaluation, with some of the tasks specifically designed to require both pre-training and fine-tuning. We hope that our proposed benchmark will facilitate further progress on both offline RL and fine-tuning algorithms. Website with code, examples, tasks, and data is available at \url{https://sites.google.com/view/d5rl/}
Efficient Imitation Learning with Conservative World Models
May 21, 2024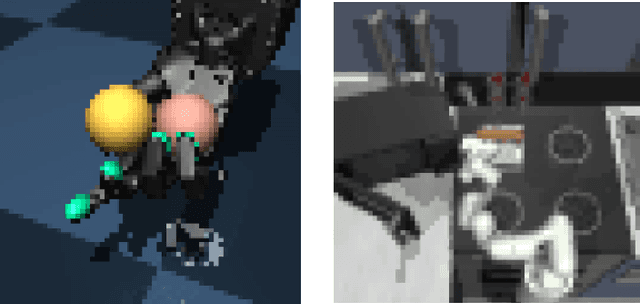
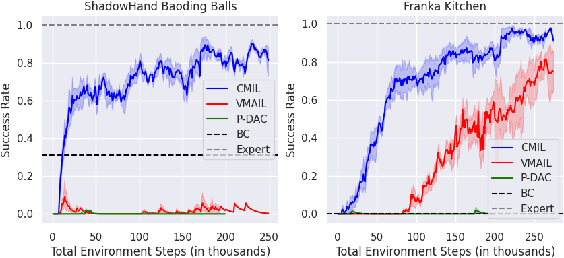
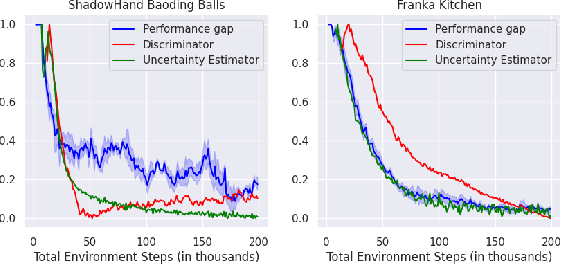
We tackle the problem of policy learning from expert demonstrations without a reward function. A central challenge in this space is that these policies fail upon deployment due to issues of distributional shift, environment stochasticity, or compounding errors. Adversarial imitation learning alleviates this issue but requires additional on-policy training samples for stability, which presents a challenge in realistic domains due to inefficient learning and high sample complexity. One approach to this issue is to learn a world model of the environment, and use synthetic data for policy training. While successful in prior works, we argue that this is sub-optimal due to additional distribution shifts between the learned model and the real environment. Instead, we re-frame imitation learning as a fine-tuning problem, rather than a pure reinforcement learning one. Drawing theoretical connections to offline RL and fine-tuning algorithms, we argue that standard online world model algorithms are not well suited to the imitation learning problem. We derive a principled conservative optimization bound and demonstrate empirically that it leads to improved performance on two very challenging manipulation environments from high-dimensional raw pixel observations. We set a new state-of-the-art performance on the Franka Kitchen environment from images, requiring only 10 demos on no reward labels, as well as solving a complex dexterity manipulation task.
MOTO: Offline Pre-training to Online Fine-tuning for Model-based Robot Learning
Jan 06, 2024We study the problem of offline pre-training and online fine-tuning for reinforcement learning from high-dimensional observations in the context of realistic robot tasks. Recent offline model-free approaches successfully use online fine-tuning to either improve the performance of the agent over the data collection policy or adapt to novel tasks. At the same time, model-based RL algorithms have achieved significant progress in sample efficiency and the complexity of the tasks they can solve, yet remain under-utilized in the fine-tuning setting. In this work, we argue that existing model-based offline RL methods are not suitable for offline-to-online fine-tuning in high-dimensional domains due to issues with distribution shifts, off-dynamics data, and non-stationary rewards. We propose an on-policy model-based method that can efficiently reuse prior data through model-based value expansion and policy regularization, while preventing model exploitation by controlling epistemic uncertainty. We find that our approach successfully solves tasks from the MetaWorld benchmark, as well as the Franka Kitchen robot manipulation environment completely from images. To the best of our knowledge, MOTO is the first method to solve this environment from pixels.
* This is an updated version of a manuscript that originally appeared at CoRL 2023. The project website is here https://sites.google.com/view/mo2o
Neural Abstract Reasoner
Nov 12, 2020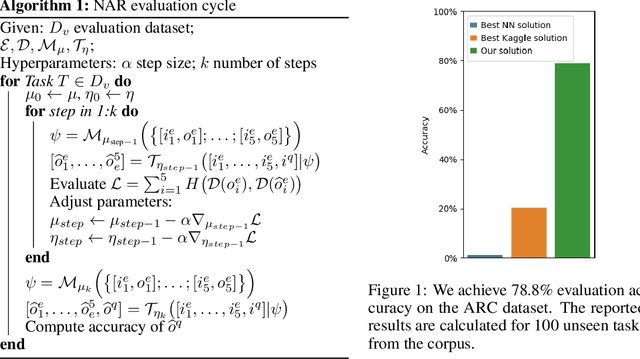
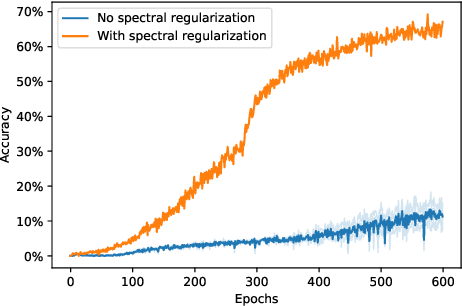
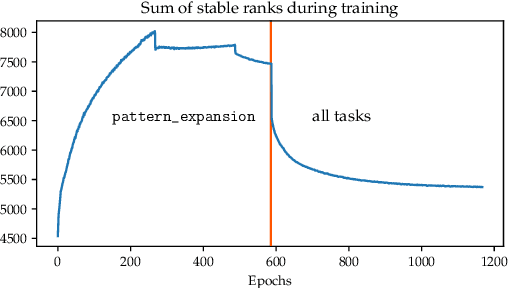
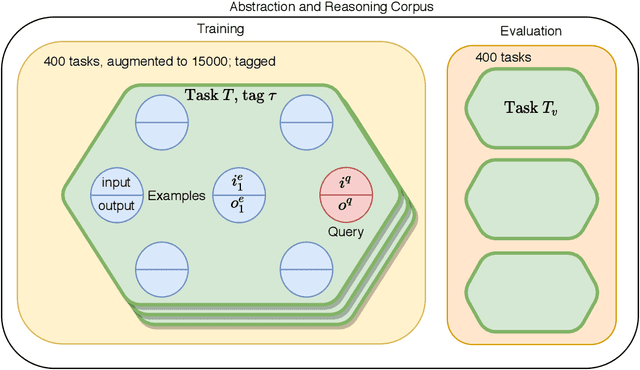
Abstract reasoning and logic inference are difficult problems for neural networks, yet essential to their applicability in highly structured domains. In this work we demonstrate that a well known technique such as spectral regularization can significantly boost the capabilities of a neural learner. We introduce the Neural Abstract Reasoner (NAR), a memory augmented architecture capable of learning and using abstract rules. We show that, when trained with spectral regularization, NAR achieves $78.8\%$ accuracy on the Abstraction and Reasoning Corpus, improving performance 4 times over the best known human hand-crafted symbolic solvers. We provide some intuition for the effects of spectral regularization in the domain of abstract reasoning based on theoretical generalization bounds and Solomonoff's theory of inductive inference.