 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQED-Nano: Teaching a Tiny Model to Prove Hard Theorems
Apr 06, 2026Proprietary AI systems have recently demonstrated impressive capabilities on complex proof-based problems, with gold-level performance reported at the 2025 International Mathematical Olympiad (IMO). However, the training pipelines behind these systems remain largely undisclosed, and their reliance on large "internal" models and scaffolds makes them expensive to run, difficult to reproduce, and hard to study or improve upon. This raises a central question: can small, open models also be trained to achieve competitive reasoning performance on difficult Olympiad-level math? In this paper, we answer this question by building QED-Nano, a 4B model post-trained for Olympiad-level proofs. Our training recipe has three stages: (1) supervised fine-tuning to imbue good proof-writing styles by distilling from DeepSeek-Math-V2, (2) reinforcement learning (RL) with rubric-based rewards, and (3) expanding RL with a reasoning cache, which decomposes long proofs into iterative summarize-and-refine cycles and enables stronger test-time reasoning. QED-Nano surpasses the proof-generation performance of much larger open models, including Nomos-1 and GPT-OSS-120B, and approaches the performance of proprietary models like Gemini 3 Pro, at a fraction of the inference cost. To support further research on open mathematical reasoning, we release the full QED-Nano pipeline, including the QED-Nano and QED-Nano-SFT models, the FineProofs-SFT and FineProofs-RL datasets, and the training and evaluation code.
IsoCompute Playbook: Optimally Scaling Sampling Compute for LLM RL
Mar 12, 2026While scaling laws guide compute allocation for LLM pre-training, analogous prescriptions for reinforcement learning (RL) post-training of large language models (LLMs) remain poorly understood. We study the compute-optimal allocation of sampling compute for on-policy RL methods in LLMs, framing scaling as a compute-constrained optimization over three resources: parallel rollouts per problem, number of problems per batch, and number of update steps. We find that the compute-optimal number of parallel rollouts per problem increases predictably with compute budget and then saturates. This trend holds across both easy and hard problems, though driven by different mechanisms: solution sharpening on easy problems and coverage expansion on hard problems. We further show that increasing the number of parallel rollouts mitigates interference across problems, while the number of problems per batch primarily affects training stability and can be chosen within a broad range. Validated across base models and data distributions, our results recast RL scaling laws as prescriptive allocation rules and provide practical guidance for compute-efficient LLM RL post-training.
What Does Flow Matching Bring To TD Learning?
Mar 04, 2026Recent work shows that flow matching can be effective for scalar Q-value function estimation in reinforcement learning (RL), but it remains unclear why or how this approach differs from standard critics. Contrary to conventional belief, we show that their success is not explained by distributional RL, as explicitly modeling return distributions can reduce performance. Instead, we argue that the use of integration for reading out values and dense velocity supervision at each step of this integration process for training improves TD learning via two mechanisms. First, it enables robust value prediction through \emph{test-time recovery}, whereby iterative computation through integration dampens errors in early value estimates as more integration steps are performed. This recovery mechanism is absent in monolithic critics. Second, supervising the velocity field at multiple interpolant values induces more \emph{plastic} feature learning within the network, allowing critics to represent non-stationary TD targets without discarding previously learned features or overfitting to individual TD targets encountered during training. We formalize these effects and validate them empirically, showing that flow-matching critics substantially outperform monolithic critics (2$\times$ in final performance and around 5$\times$ in sample efficiency) in settings where loss of plasticity poses a challenge e.g., in high-UTD online RL problems, while remaining stable during learning.
BPP: Long-Context Robot Imitation Learning by Focusing on Key History Frames
Feb 16, 2026Many robot tasks require attending to the history of past observations. For example, finding an item in a room requires remembering which places have already been searched. However, the best-performing robot policies typically condition only on the current observation, limiting their applicability to such tasks. Naively conditioning on past observations often fails due to spurious correlations: policies latch onto incidental features of training histories that do not generalize to out-of-distribution trajectories upon deployment. We analyze why policies latch onto these spurious correlations and find that this problem stems from limited coverage over the space of possible histories during training, which grows exponentially with horizon. Existing regularization techniques provide inconsistent benefits across tasks, as they do not fundamentally address this coverage problem. Motivated by these findings, we propose Big Picture Policies (BPP), an approach that conditions on a minimal set of meaningful keyframes detected by a vision-language model. By projecting diverse rollouts onto a compact set of task-relevant events, BPP substantially reduces distribution shift between training and deployment, without sacrificing expressivity. We evaluate BPP on four challenging real-world manipulation tasks and three simulation tasks, all requiring history conditioning. BPP achieves 70% higher success rates than the best comparison on real-world evaluations.
Reasoning Cache: Continual Improvement Over Long Horizons via Short-Horizon RL
Feb 03, 2026Large Language Models (LLMs) that can continually improve beyond their training budgets are able to solve increasingly difficult problems by adapting at test time, a property we refer to as extrapolation. However, standard reinforcement learning (RL) operates over fixed problem distributions and training budgets, which limits extrapolation amidst distribution shift at test time. To address this, we introduce RC, an iterative decoding algorithm that replaces standard autoregressive decoding during both training and inference. RC exploits an asymmetry between the response generation and summarization capabilities of LLMs to construct reasoning chains that consistently improve across iterations. Models trained to use RC can extrapolate and continually improve over reasoning horizons more than an order of magnitude longer than those seen during training. Empirically, training a 4B model with RC using a 16k-token training budget improves performance on HMMT 2025 from 40% to nearly 70% with 0.5m tokens at test time, outperforming both comparably sized models and many larger reasoning LLMs. Finally, we also show that models trained with RC can more effectively leverage existing scaffolds to further scale test-time performance, due to the improved summary-conditioned generation abilities learned through training.
POPE: Learning to Reason on Hard Problems via Privileged On-Policy Exploration
Jan 26, 2026Reinforcement learning (RL) has improved the reasoning abilities of large language models (LLMs), yet state-of-the-art methods still fail to learn on many training problems. On hard problems, on-policy RL rarely explores even a single correct rollout, yielding zero reward and no learning signal for driving improvement. We find that natural solutions to remedy this exploration problem from classical RL, such as entropy bonuses, more permissive clipping of the importance ratio, or direct optimization of pass@k objectives, do not resolve this issue and often destabilize optimization without improving solvability. A natural alternative is to leverage transfer from easier problems. However, we show that mixing easy and hard problems during RL training is counterproductive due to ray interference, where optimization focuses on already-solvable problems in a way that actively inhibits progress on harder ones. To address this challenge, we introduce Privileged On-Policy Exploration (POPE), an approach that leverages human- or other oracle solutions as privileged information to guide exploration on hard problems, unlike methods that use oracle solutions as training targets (e.g., off-policy RL methods or warmstarting from SFT). POPE augments hard problems with prefixes of oracle solutions, enabling RL to obtain non-zero rewards during guided rollouts. Crucially, the resulting behaviors transfer back to the original, unguided problems through a synergy between instruction-following and reasoning. Empirically, POPE expands the set of solvable problems and substantially improves performance on challenging reasoning benchmarks.
InT: Self-Proposed Interventions Enable Credit Assignment in LLM Reasoning
Jan 20, 2026Outcome-reward reinforcement learning (RL) has proven effective at improving the reasoning capabilities of large language models (LLMs). However, standard RL assigns credit only at the level of the final answer, penalizing entire reasoning traces when the outcome is incorrect and uniformly reinforcing all steps when it is correct. As a result, correct intermediate steps may be discouraged in failed traces, while spurious steps may be reinforced in successful ones. We refer to this failure mode as the problem of credit assignment. While a natural remedy is to train a process reward model, accurately optimizing such models to identify corrective reasoning steps remains challenging. We introduce Intervention Training (InT), a training paradigm in which the model performs fine-grained credit assignment on its own reasoning traces by proposing short, targeted corrections that steer trajectories toward higher reward. Using reference solutions commonly available in mathematical reasoning datasets and exploiting the fact that verifying a model-generated solution is easier than generating a correct one from scratch, the model identifies the first error in its reasoning and proposes a single-step intervention to redirect the trajectory toward the correct solution. We then apply supervised fine-tuning (SFT) to the on-policy rollout up to the point of error concatenated with the intervention, localizing error to the specific step that caused failure. We show that the resulting model serves as a far better initialization for RL training. After running InT and subsequent fine-tuning with RL, we improve accuracy by nearly 14% over a 4B-parameter base model on IMO-AnswerBench, outperforming larger open-source models such as gpt-oss-20b.
TRIM: Hybrid Inference via Targeted Stepwise Routing in Multi-Step Reasoning Tasks
Jan 15, 2026Multi-step reasoning tasks like mathematical problem solving are vulnerable to cascading failures, where a single incorrect step leads to complete solution breakdown. Current LLM routing methods assign entire queries to one model, treating all reasoning steps as equal. We propose TRIM (Targeted routing in multi-step reasoning tasks), which routes only critical steps$\unicode{x2013}$those likely to derail the solution$\unicode{x2013}$to larger models while letting smaller models handle routine continuations. Our key insight is that targeted step-level interventions can fundamentally transform inference efficiency by confining expensive calls to precisely those steps where stronger models prevent cascading errors. TRIM operates at the step-level: it uses process reward models to identify erroneous steps and makes routing decisions based on step-level uncertainty and budget constraints. We develop several routing strategies within TRIM, ranging from a simple threshold-based policy to more expressive policies that reason about long-horizon accuracy-cost trade-offs and uncertainty in step-level correctness estimates. On MATH-500, even the simplest thresholding strategy surpasses prior routing methods with 5x higher cost efficiency, while more advanced policies match the strong, expensive model's performance using 80% fewer expensive model tokens. On harder benchmarks such as AIME, TRIM achieves up to 6x higher cost efficiency. All methods generalize effectively across math reasoning tasks, demonstrating that step-level difficulty represents fundamental characteristics of reasoning.
WebGym: Scaling Training Environments for Visual Web Agents with Realistic Tasks
Jan 07, 2026We present WebGym, the largest-to-date open-source environment for training realistic visual web agents. Real websites are non-stationary and diverse, making artificial or small-scale task sets insufficient for robust policy learning. WebGym contains nearly 300,000 tasks with rubric-based evaluations across diverse, real-world websites and difficulty levels. We train agents with a simple reinforcement learning (RL) recipe, which trains on the agent's own interaction traces (rollouts), using task rewards as feedback to guide learning. To enable scaling RL, we speed up sampling of trajectories in WebGym by developing a high-throughput asynchronous rollout system, designed specifically for web agents. Our system achieves a 4-5x rollout speedup compared to naive implementations. Second, we scale the task set breadth, depth, and size, which results in continued performance improvement. Fine-tuning a strong base vision-language model, Qwen-3-VL-8B-Instruct, on WebGym results in an improvement in success rate on an out-of-distribution test set from 26.2% to 42.9%, significantly outperforming agents based on proprietary models such as GPT-4o and GPT-5-Thinking that achieve 27.1% and 29.8%, respectively. This improvement is substantial because our test set consists only of tasks on websites never seen during training, unlike many other prior works on training visual web agents.
RLAD: Training LLMs to Discover Abstractions for Solving Reasoning Problems
Oct 02, 2025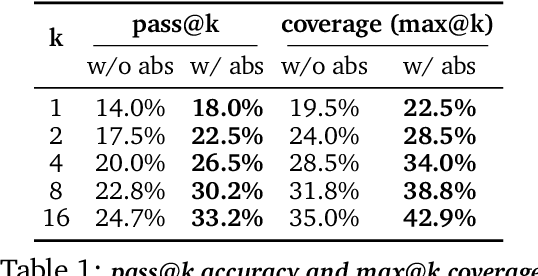
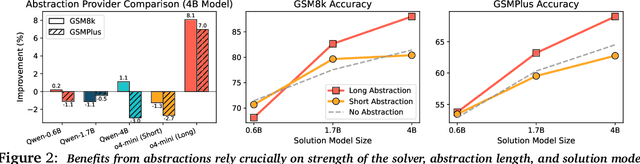
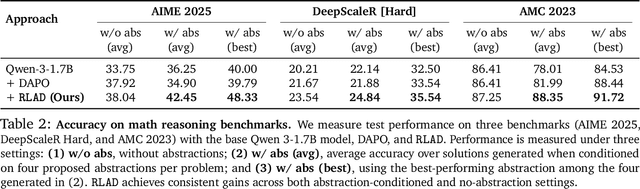
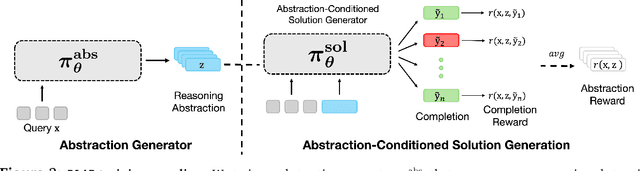
Reasoning requires going beyond pattern matching or memorization of solutions to identify and implement "algorithmic procedures" that can be used to deduce answers to hard problems. Doing so requires realizing the most relevant primitives, intermediate results, or shared procedures, and building upon them. While RL post-training on long chains of thought ultimately aims to uncover this kind of algorithmic behavior, most reasoning traces learned by large models fail to consistently capture or reuse procedures, instead drifting into verbose and degenerate exploration. To address more effective reasoning, we introduce reasoning abstractions: concise natural language descriptions of procedural and factual knowledge that guide the model toward learning successful reasoning. We train models to be capable of proposing multiple abstractions given a problem, followed by RL that incentivizes building a solution while using the information provided by these abstractions. This results in a two-player RL training paradigm, abbreviated as RLAD, that jointly trains an abstraction generator and a solution generator. This setup effectively enables structured exploration, decouples learning signals of abstraction proposal and solution generation, and improves generalization to harder problems. We also show that allocating more test-time compute to generating abstractions is more beneficial for performance than generating more solutions at large test budgets, illustrating the role of abstractions in guiding meaningful exploration.