 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolutionary System Prompt Learning can Facilitate Reinforcement Learning for LLMs
Feb 16, 2026Building agentic systems that can autonomously self-improve from experience is a longstanding goal of AI. Large language models (LLMs) today primarily self-improve via two mechanisms: self-reflection for context updates, and reinforcement learning (RL) for weight updates. In this work, we propose Evolutionary System Prompt Learning (E-SPL), a method for jointly improving model contexts and model weights. In each RL iteration, E-SPL selects multiple system prompts and runs rollouts with each in parallel. It applies RL updates to model weights conditioned on each system prompt, and evolutionary updates to the system prompt population via LLM-driven mutation and crossover. Each system prompt has a TrueSkill rating for evolutionary selection, updated from relative performance within each RL iteration batch. E-SPL encourages a natural division between declarative knowledge encoded in prompts and procedural knowledge encoded in weights, resulting in improved performance across reasoning and agentic tasks. For instance, in an easy-to-hard (AIME $\rightarrow$ BeyondAIME) generalization setting, E-SPL improves RL success rate from 38.8% $\rightarrow$ 45.1% while also outperforming reflective prompt evolution (40.0%). Overall, our results show that coupling reinforcement learning with system prompt evolution yields consistent gains in sample efficiency and generalization. Code: https://github.com/LunjunZhang/E-SPL
EMA Policy Gradient: Taming Reinforcement Learning for LLMs with EMA Anchor and Top-k KL
Feb 04, 2026Reinforcement Learning (RL) has enabled Large Language Models (LLMs) to acquire increasingly complex reasoning and agentic behaviors. In this work, we propose two simple techniques to improve policy gradient algorithms for LLMs. First, we replace the fixed anchor policy during RL with an Exponential Moving Average (EMA), similar to a target network in deep Q-learning. Second, we introduce Top-k KL estimator, which allows for flexible interpolation between exact KL and sampled KL. We derive the stability conditions for using EMA anchor; moreover, we show that our Top-k KL estimator yields both unbiased KL values and unbiased gradients at any k, while bringing the benefits of exact KL. When combined with GRPO, the two techniques (EMA-PG) lead to a significant performance boost. On math reasoning, it allows R1-distilled Qwen-1.5B to reach 53.9% on OlympiadBench compared to 50.8% by GRPO. On agentic RL domains, with Qwen-3B base, EMA-PG improves GRPO by an average of 33.3% across 7 datasets of Q&A with search engines, including 29.7% $\rightarrow$ 44.1% on HotpotQA, 27.4% $\rightarrow$ 40.1% on 2WikiMultiHopQA. Overall, we show that EMA-PG is a simple, principled, and powerful approach to scaling RL for LLMs. Code: https://github.com/LunjunZhang/ema-pg
Thinking vs. Doing: Agents that Reason by Scaling Test-Time Interaction
Jun 09, 2025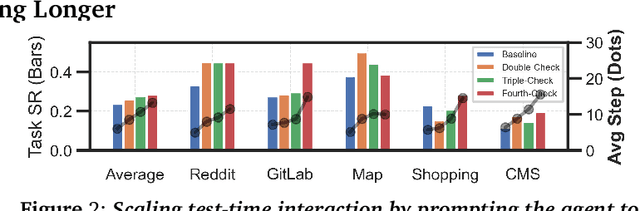
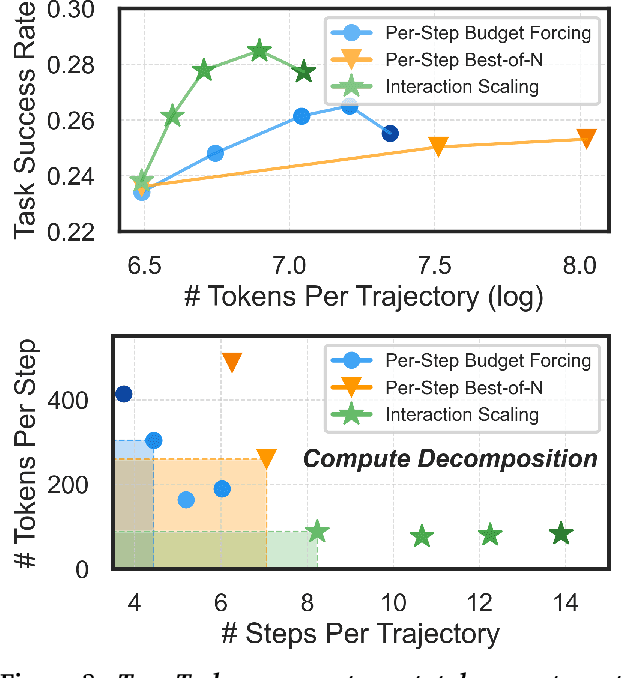
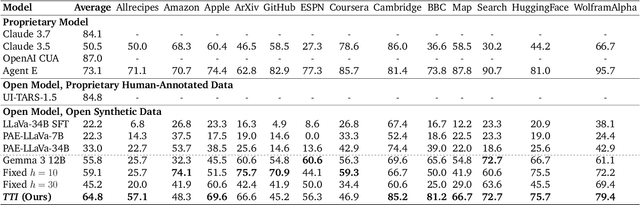
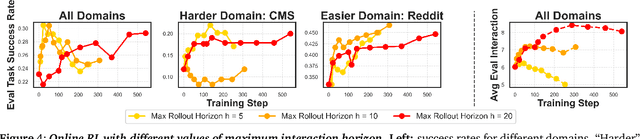
The current paradigm of test-time scaling relies on generating long reasoning traces ("thinking" more) before producing a response. In agent problems that require interaction, this can be done by generating thinking traces before acting in the world. However, this process does not allow agents to acquire new information from the environment or adapt their behavior over time. In this work, we propose to scale test-time interaction, an untapped dimension of test-time scaling that increases the agent's interaction horizon to enable running rich behaviors such as exploration, backtracking, and dynamic re-planning within a single rollout. To demonstrate the promise of this scaling dimension, we study the domain of web agents. We first show that even prompting-based interaction scaling without any training can improve task success on web benchmarks non-trivially. Building on this, we introduce TTI (Test-Time Interaction), a curriculum-based online reinforcement learning (RL) approach that trains agents by adaptively adjusting their rollout lengths. Using a Gemma 3 12B model, TTI produces state-of-the-art open-source, open-data web agents on WebVoyager and WebArena benchmarks. We further show that TTI enables agents to balance exploration and exploitation adaptively. Our results establish interaction scaling as a powerful, complementary axis to scaling per-step compute, offering new avenues for training adaptive agents.
Learning to Drive via Asymmetric Self-Play
Sep 26, 2024
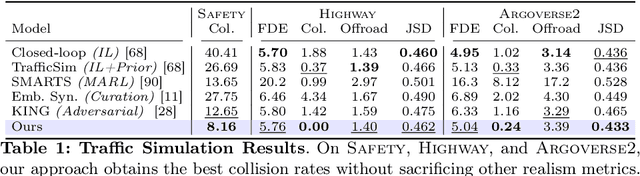
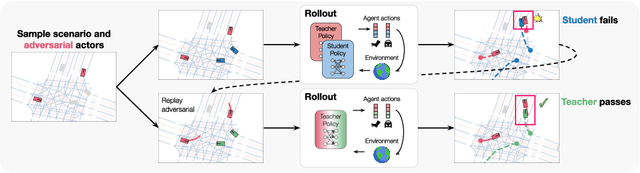
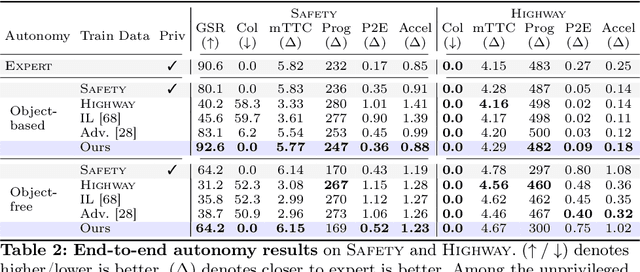
Large-scale data is crucial for learning realistic and capable driving policies. However, it can be impractical to rely on scaling datasets with real data alone. The majority of driving data is uninteresting, and deliberately collecting new long-tail scenarios is expensive and unsafe. We propose asymmetric self-play to scale beyond real data with additional challenging, solvable, and realistic synthetic scenarios. Our approach pairs a teacher that learns to generate scenarios it can solve but the student cannot, with a student that learns to solve them. When applied to traffic simulation, we learn realistic policies with significantly fewer collisions in both nominal and long-tail scenarios. Our policies further zero-shot transfer to generate training data for end-to-end autonomy, significantly outperforming state-of-the-art adversarial approaches, or using real data alone. For more information, visit https://waabi.ai/selfplay .
Generative Verifiers: Reward Modeling as Next-Token Prediction
Aug 27, 2024



Verifiers or reward models are often used to enhance the reasoning performance of large language models (LLMs). A common approach is the Best-of-N method, where N candidate solutions generated by the LLM are ranked by a verifier, and the best one is selected. While LLM-based verifiers are typically trained as discriminative classifiers to score solutions, they do not utilize the text generation capabilities of pretrained LLMs. To overcome this limitation, we instead propose training verifiers using the ubiquitous next-token prediction objective, jointly on verification and solution generation. Compared to standard verifiers, such generative verifiers (GenRM) can benefit from several advantages of LLMs: they integrate seamlessly with instruction tuning, enable chain-of-thought reasoning, and can utilize additional inference-time compute via majority voting for better verification. We demonstrate that when using Gemma-based verifiers on algorithmic and grade-school math reasoning tasks, GenRM outperforms discriminative verifiers and LLM-as-a-Judge, showing a 16-64% improvement in the percentage of problems solved with Best-of-N. Furthermore, we show that GenRM scales favorably across dataset size, model capacity, and inference-time compute.
Towards Unsupervised Object Detection From LiDAR Point Clouds
Nov 03, 2023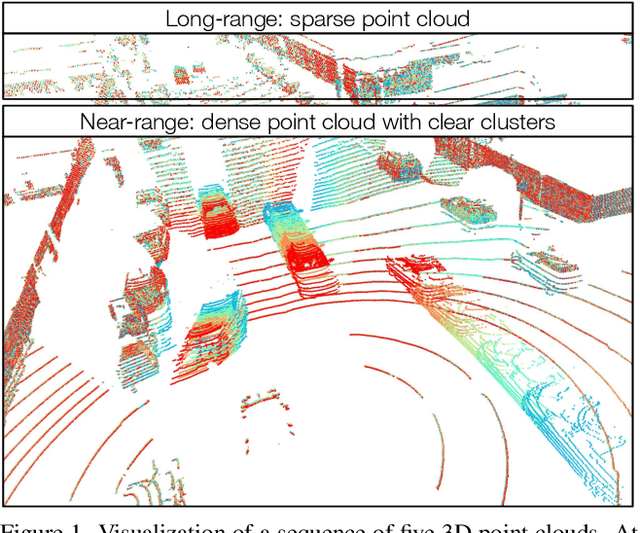
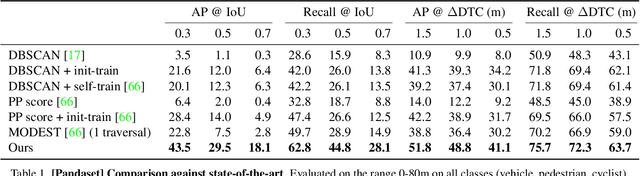
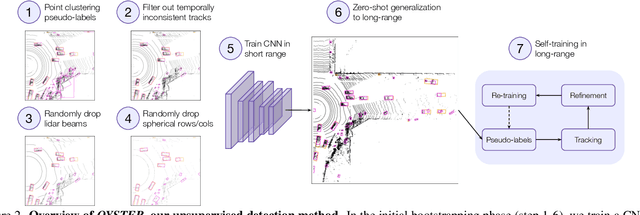
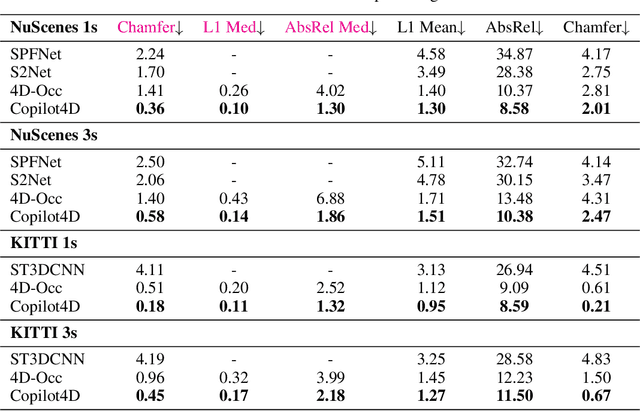
In this paper, we study the problem of unsupervised object detection from 3D point clouds in self-driving scenes. We present a simple yet effective method that exploits (i) point clustering in near-range areas where the point clouds are dense, (ii) temporal consistency to filter out noisy unsupervised detections, (iii) translation equivariance of CNNs to extend the auto-labels to long range, and (iv) self-supervision for improving on its own. Our approach, OYSTER (Object Discovery via Spatio-Temporal Refinement), does not impose constraints on data collection (such as repeated traversals of the same location), is able to detect objects in a zero-shot manner without supervised finetuning (even in sparse, distant regions), and continues to self-improve given more rounds of iterative self-training. To better measure model performance in self-driving scenarios, we propose a new planning-centric perception metric based on distance-to-collision. We demonstrate that our unsupervised object detector significantly outperforms unsupervised baselines on PandaSet and Argoverse 2 Sensor dataset, showing promise that self-supervision combined with object priors can enable object discovery in the wild. For more information, visit the project website: https://waabi.ai/research/oyster
Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion
Nov 02, 2023


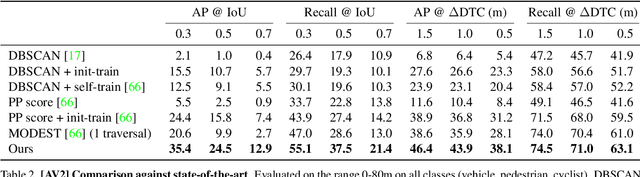
Learning world models can teach an agent how the world works in an unsupervised manner. Even though it can be viewed as a special case of sequence modeling, progress for scaling world models on robotic applications such as autonomous driving has been somewhat less rapid than scaling language models with Generative Pre-trained Transformers (GPT). We identify two reasons as major bottlenecks: dealing with complex and unstructured observation space, and having a scalable generative model. Consequently, we propose a novel world modeling approach that first tokenizes sensor observations with VQVAE, then predicts the future via discrete diffusion. To efficiently decode and denoise tokens in parallel, we recast Masked Generative Image Transformer into the discrete diffusion framework with a few simple changes, resulting in notable improvement. When applied to learning world models on point cloud observations, our model reduces prior SOTA Chamfer distance by more than 65% for 1s prediction, and more than 50% for 3s prediction, across NuScenes, KITTI Odometry, and Argoverse2 datasets. Our results demonstrate that discrete diffusion on tokenized agent experience can unlock the power of GPT-like unsupervised learning for robotic agents.
Learning Realistic Traffic Agents in Closed-loop
Nov 02, 2023Realistic traffic simulation is crucial for developing self-driving software in a safe and scalable manner prior to real-world deployment. Typically, imitation learning (IL) is used to learn human-like traffic agents directly from real-world observations collected offline, but without explicit specification of traffic rules, agents trained from IL alone frequently display unrealistic infractions like collisions and driving off the road. This problem is exacerbated in out-of-distribution and long-tail scenarios. On the other hand, reinforcement learning (RL) can train traffic agents to avoid infractions, but using RL alone results in unhuman-like driving behaviors. We propose Reinforcing Traffic Rules (RTR), a holistic closed-loop learning objective to match expert demonstrations under a traffic compliance constraint, which naturally gives rise to a joint IL + RL approach, obtaining the best of both worlds. Our method learns in closed-loop simulations of both nominal scenarios from real-world datasets as well as procedurally generated long-tail scenarios. Our experiments show that RTR learns more realistic and generalizable traffic simulation policies, achieving significantly better tradeoffs between human-like driving and traffic compliance in both nominal and long-tail scenarios. Moreover, when used as a data generation tool for training prediction models, our learned traffic policy leads to considerably improved downstream prediction metrics compared to baseline traffic agents. For more information, visit the project website: https://waabi.ai/rtr
Understanding Hindsight Goal Relabeling Requires Rethinking Divergence Minimization
Sep 26, 2022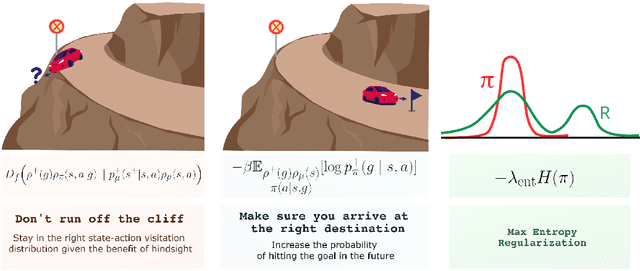
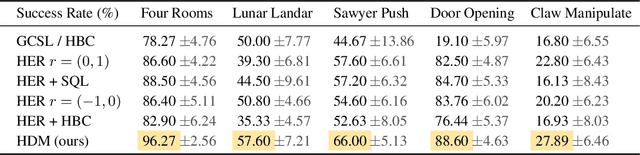
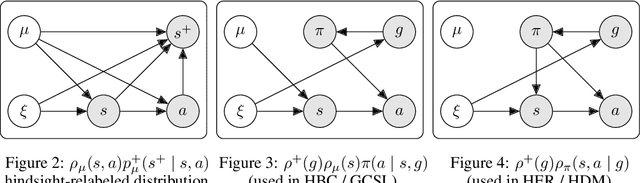
Hindsight goal relabeling has become a foundational technique for multi-goal reinforcement learning (RL). The idea is quite simple: any arbitrary trajectory can be seen as an expert demonstration for reaching the trajectory's end state. Intuitively, this procedure trains a goal-conditioned policy to imitate a sub-optimal expert. However, this connection between imitation and hindsight relabeling is not well understood. Modern imitation learning algorithms are described in the language of divergence minimization, and yet it remains an open problem how to recast hindsight goal relabeling into that framework. In this work, we develop a unified objective for goal-reaching that explains such a connection, from which we can derive goal-conditioned supervised learning (GCSL) and the reward function in hindsight experience replay (HER) from first principles. Experimentally, we find that despite recent advances in goal-conditioned behaviour cloning (BC), multi-goal Q-learning can still outperform BC-like methods; moreover, a vanilla combination of both actually hurts model performance. Under our framework, we study when BC is expected to help, and empirically validate our findings. Our work further bridges goal-reaching and generative modeling, illustrating the nuances and new pathways of extending the success of generative models to RL.
World Model as a Graph: Learning Latent Landmarks for Planning
Nov 25, 2020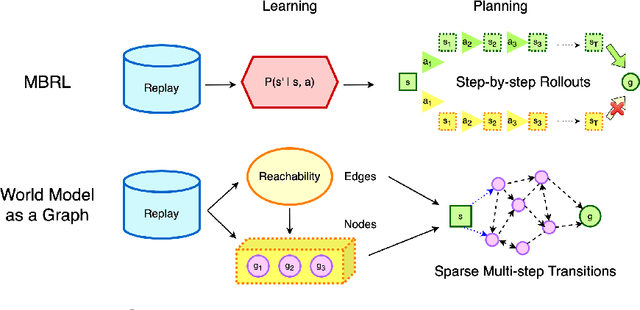
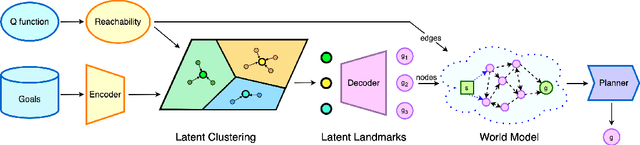

Planning - the ability to analyze the structure of a problem in the large and decompose it into interrelated subproblems - is a hallmark of human intelligence. While deep reinforcement learning (RL) has shown great promise for solving relatively straightforward control tasks, it remains an open problem how to best incorporate planning into existing deep RL paradigms to handle increasingly complex environments. One prominent framework, Model-Based RL, learns a world model and plans using step-by-step virtual rollouts. This type of world model quickly diverges from reality when the planning horizon increases, thus struggling at long-horizon planning. How can we learn world models that endow agents with the ability to do temporally extended reasoning? In this work, we propose to learn graph-structured world models composed of sparse, multi-step transitions. We devise a novel algorithm to learn latent landmarks that are scattered (in terms of reachability) across the goal space as the nodes on the graph. In this same graph, the edges are the reachability estimates distilled from Q-functions. On a variety of high-dimensional continuous control tasks ranging from robotic manipulation to navigation, we demonstrate that our method, named L3P, significantly outperforms prior work, and is oftentimes the only method capable of leveraging both the robustness of model-free RL and generalization of graph-search algorithms. We believe our work is an important step towards scalable planning in reinforcement learning.