 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScaling Laws of Motion Forecasting and Planning -- A Technical Report
Jun 09, 2025We study the empirical scaling laws of a family of encoder-decoder autoregressive transformer models on the task of joint motion forecasting and planning in the autonomous driving domain. Using a 500 thousand hours driving dataset, we demonstrate that, similar to language modeling, model performance improves as a power-law function of the total compute budget, and we observe a strong correlation between model training loss and model evaluation metrics. Most interestingly, closed-loop metrics also improve with scaling, which has important implications for the suitability of open-loop metrics for model development and hill climbing. We also study the optimal scaling of the number of transformer parameters and the training data size for a training compute-optimal model. We find that as the training compute budget grows, optimal scaling requires increasing the model size 1.5x as fast as the dataset size. We also study inference-time compute scaling, where we observe that sampling and clustering the output of smaller models makes them competitive with larger models, up to a crossover point beyond which a larger models becomes more inference-compute efficient. Overall, our experimental results demonstrate that optimizing the training and inference-time scaling properties of motion forecasting and planning models is a key lever for improving their performance to address a wide variety of driving scenarios. Finally, we briefly study the utility of training on general logged driving data of other agents to improve the performance of the ego-agent, an important research area to address the scarcity of robotics data for large capacity models training.
Learning to Drive via Asymmetric Self-Play
Sep 26, 2024
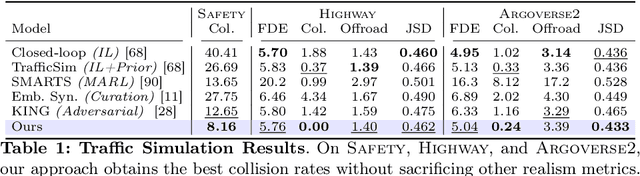
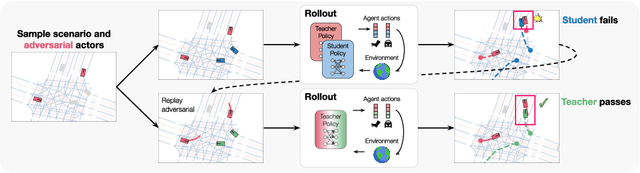
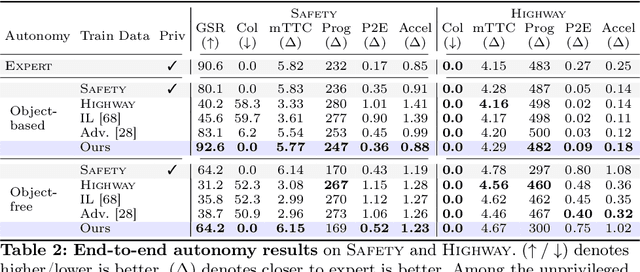
Large-scale data is crucial for learning realistic and capable driving policies. However, it can be impractical to rely on scaling datasets with real data alone. The majority of driving data is uninteresting, and deliberately collecting new long-tail scenarios is expensive and unsafe. We propose asymmetric self-play to scale beyond real data with additional challenging, solvable, and realistic synthetic scenarios. Our approach pairs a teacher that learns to generate scenarios it can solve but the student cannot, with a student that learns to solve them. When applied to traffic simulation, we learn realistic policies with significantly fewer collisions in both nominal and long-tail scenarios. Our policies further zero-shot transfer to generate training data for end-to-end autonomy, significantly outperforming state-of-the-art adversarial approaches, or using real data alone. For more information, visit https://waabi.ai/selfplay .
UnO: Unsupervised Occupancy Fields for Perception and Forecasting
Jun 12, 2024Perceiving the world and forecasting its future state is a critical task for self-driving. Supervised approaches leverage annotated object labels to learn a model of the world -- traditionally with object detections and trajectory predictions, or temporal bird's-eye-view (BEV) occupancy fields. However, these annotations are expensive and typically limited to a set of predefined categories that do not cover everything we might encounter on the road. Instead, we learn to perceive and forecast a continuous 4D (spatio-temporal) occupancy field with self-supervision from LiDAR data. This unsupervised world model can be easily and effectively transferred to downstream tasks. We tackle point cloud forecasting by adding a lightweight learned renderer and achieve state-of-the-art performance in Argoverse 2, nuScenes, and KITTI. To further showcase its transferability, we fine-tune our model for BEV semantic occupancy forecasting and show that it outperforms the fully supervised state-of-the-art, especially when labeled data is scarce. Finally, when compared to prior state-of-the-art on spatio-temporal geometric occupancy prediction, our 4D world model achieves a much higher recall of objects from classes relevant to self-driving.
DeTra: A Unified Model for Object Detection and Trajectory Forecasting
Jun 06, 2024The tasks of object detection and trajectory forecasting play a crucial role in understanding the scene for autonomous driving. These tasks are typically executed in a cascading manner, making them prone to compounding errors. Furthermore, there is usually a very thin interface between the two tasks, creating a lossy information bottleneck. To address these challenges, our approach formulates the union of the two tasks as a trajectory refinement problem, where the first pose is the detection (current time), and the subsequent poses are the waypoints of the multiple forecasts (future time). To tackle this unified task, we design a refinement transformer that infers the presence, pose, and multi-modal future behaviors of objects directly from LiDAR point clouds and high-definition maps. We call this model DeTra, short for object Detection and Trajectory forecasting. In our experiments, we observe that \ourmodel{} outperforms the state-of-the-art on Argoverse 2 Sensor and Waymo Open Dataset by a large margin, across a broad range of metrics. Last but not least, we perform extensive ablation studies that show the value of refinement for this task, that every proposed component contributes positively to its performance, and that key design choices were made.
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Apr 01, 2024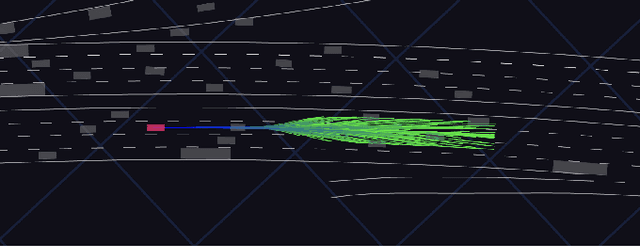
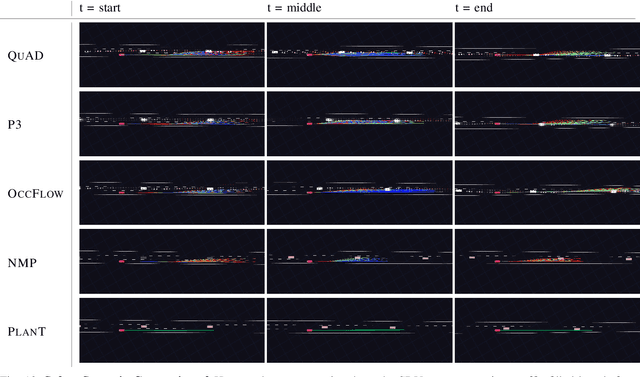
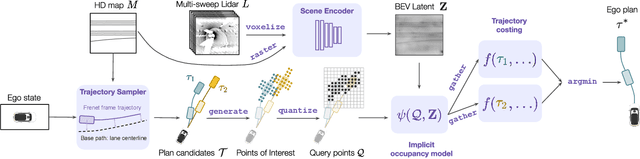
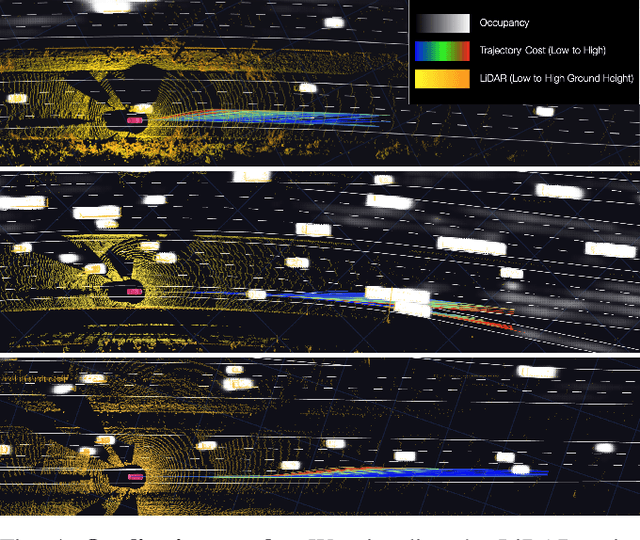
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
4D-Former: Multimodal 4D Panoptic Segmentation
Nov 17, 2023



4D panoptic segmentation is a challenging but practically useful task that requires every point in a LiDAR point-cloud sequence to be assigned a semantic class label, and individual objects to be segmented and tracked over time. Existing approaches utilize only LiDAR inputs which convey limited information in regions with point sparsity. This problem can, however, be mitigated by utilizing RGB camera images which offer appearance-based information that can reinforce the geometry-based LiDAR features. Motivated by this, we propose 4D-Former: a novel method for 4D panoptic segmentation which leverages both LiDAR and image modalities, and predicts semantic masks as well as temporally consistent object masks for the input point-cloud sequence. We encode semantic classes and objects using a set of concise queries which absorb feature information from both data modalities. Additionally, we propose a learned mechanism to associate object tracks over time which reasons over both appearance and spatial location. We apply 4D-Former to the nuScenes and SemanticKITTI datasets where it achieves state-of-the-art results.
Towards Unsupervised Object Detection From LiDAR Point Clouds
Nov 03, 2023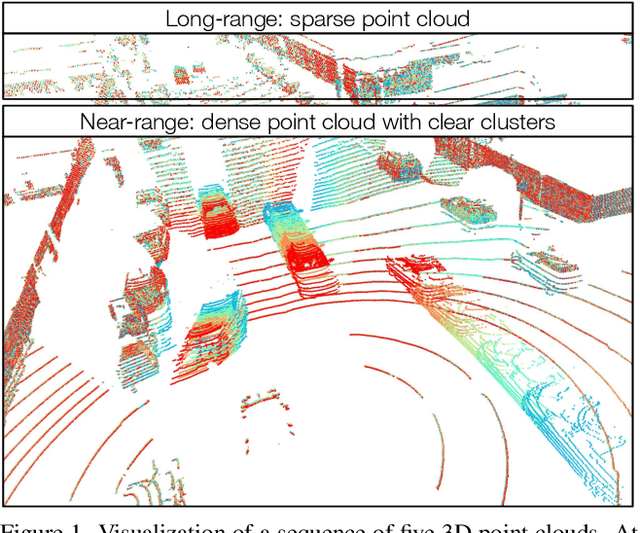
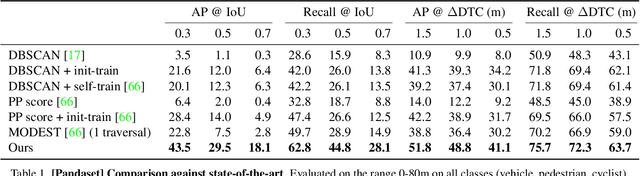
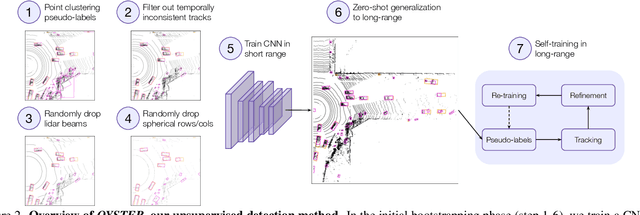
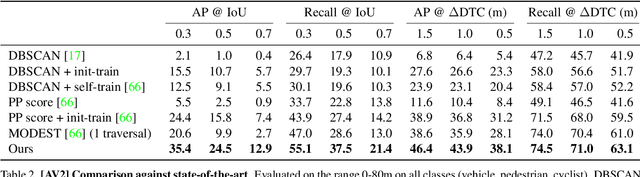
In this paper, we study the problem of unsupervised object detection from 3D point clouds in self-driving scenes. We present a simple yet effective method that exploits (i) point clustering in near-range areas where the point clouds are dense, (ii) temporal consistency to filter out noisy unsupervised detections, (iii) translation equivariance of CNNs to extend the auto-labels to long range, and (iv) self-supervision for improving on its own. Our approach, OYSTER (Object Discovery via Spatio-Temporal Refinement), does not impose constraints on data collection (such as repeated traversals of the same location), is able to detect objects in a zero-shot manner without supervised finetuning (even in sparse, distant regions), and continues to self-improve given more rounds of iterative self-training. To better measure model performance in self-driving scenarios, we propose a new planning-centric perception metric based on distance-to-collision. We demonstrate that our unsupervised object detector significantly outperforms unsupervised baselines on PandaSet and Argoverse 2 Sensor dataset, showing promise that self-supervision combined with object priors can enable object discovery in the wild. For more information, visit the project website: https://waabi.ai/research/oyster
LabelFormer: Object Trajectory Refinement for Offboard Perception from LiDAR Point Clouds
Nov 02, 2023



A major bottleneck to scaling-up training of self-driving perception systems are the human annotations required for supervision. A promising alternative is to leverage "auto-labelling" offboard perception models that are trained to automatically generate annotations from raw LiDAR point clouds at a fraction of the cost. Auto-labels are most commonly generated via a two-stage approach -- first objects are detected and tracked over time, and then each object trajectory is passed to a learned refinement model to improve accuracy. Since existing refinement models are overly complex and lack advanced temporal reasoning capabilities, in this work we propose LabelFormer, a simple, efficient, and effective trajectory-level refinement approach. Our approach first encodes each frame's observations separately, then exploits self-attention to reason about the trajectory with full temporal context, and finally decodes the refined object size and per-frame poses. Evaluation on both urban and highway datasets demonstrates that LabelFormer outperforms existing works by a large margin. Finally, we show that training on a dataset augmented with auto-labels generated by our method leads to improved downstream detection performance compared to existing methods. Please visit the project website for details https://waabi.ai/labelformer
* 20 pages, 8 figures, 7 tables
MemorySeg: Online LiDAR Semantic Segmentation with a Latent Memory
Nov 02, 2023



Semantic segmentation of LiDAR point clouds has been widely studied in recent years, with most existing methods focusing on tackling this task using a single scan of the environment. However, leveraging the temporal stream of observations can provide very rich contextual information on regions of the scene with poor visibility (e.g., occlusions) or sparse observations (e.g., at long range), and can help reduce redundant computation frame after frame. In this paper, we tackle the challenge of exploiting the information from the past frames to improve the predictions of the current frame in an online fashion. To address this challenge, we propose a novel framework for semantic segmentation of a temporal sequence of LiDAR point clouds that utilizes a memory network to store, update and retrieve past information. Our framework also includes a regularizer that penalizes prediction variations in the neighborhood of the point cloud. Prior works have attempted to incorporate memory in range view representations for semantic segmentation, but these methods fail to handle occlusions and the range view representation of the scene changes drastically as agents nearby move. Our proposed framework overcomes these limitations by building a sparse 3D latent representation of the surroundings. We evaluate our method on SemanticKITTI, nuScenes, and PandaSet. Our experiments demonstrate the effectiveness of the proposed framework compared to the state-of-the-art.
Learning Unsupervised World Models for Autonomous Driving via Discrete Diffusion
Nov 02, 2023
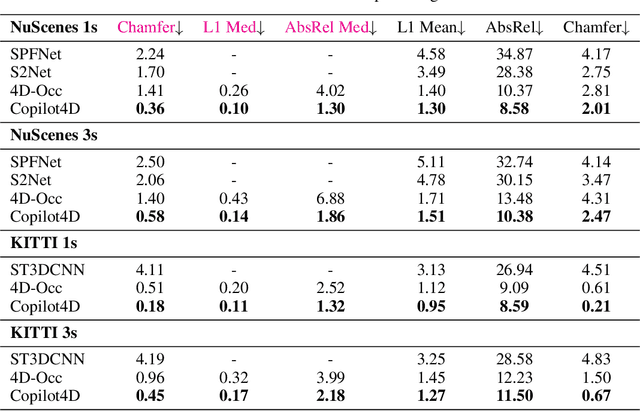


Learning world models can teach an agent how the world works in an unsupervised manner. Even though it can be viewed as a special case of sequence modeling, progress for scaling world models on robotic applications such as autonomous driving has been somewhat less rapid than scaling language models with Generative Pre-trained Transformers (GPT). We identify two reasons as major bottlenecks: dealing with complex and unstructured observation space, and having a scalable generative model. Consequently, we propose a novel world modeling approach that first tokenizes sensor observations with VQVAE, then predicts the future via discrete diffusion. To efficiently decode and denoise tokens in parallel, we recast Masked Generative Image Transformer into the discrete diffusion framework with a few simple changes, resulting in notable improvement. When applied to learning world models on point cloud observations, our model reduces prior SOTA Chamfer distance by more than 65% for 1s prediction, and more than 50% for 3s prediction, across NuScenes, KITTI Odometry, and Argoverse2 datasets. Our results demonstrate that discrete diffusion on tokenized agent experience can unlock the power of GPT-like unsupervised learning for robotic agents.