 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnO: Unsupervised Occupancy Fields for Perception and Forecasting
Jun 12, 2024Perceiving the world and forecasting its future state is a critical task for self-driving. Supervised approaches leverage annotated object labels to learn a model of the world -- traditionally with object detections and trajectory predictions, or temporal bird's-eye-view (BEV) occupancy fields. However, these annotations are expensive and typically limited to a set of predefined categories that do not cover everything we might encounter on the road. Instead, we learn to perceive and forecast a continuous 4D (spatio-temporal) occupancy field with self-supervision from LiDAR data. This unsupervised world model can be easily and effectively transferred to downstream tasks. We tackle point cloud forecasting by adding a lightweight learned renderer and achieve state-of-the-art performance in Argoverse 2, nuScenes, and KITTI. To further showcase its transferability, we fine-tune our model for BEV semantic occupancy forecasting and show that it outperforms the fully supervised state-of-the-art, especially when labeled data is scarce. Finally, when compared to prior state-of-the-art on spatio-temporal geometric occupancy prediction, our 4D world model achieves a much higher recall of objects from classes relevant to self-driving.
QuAD: Query-based Interpretable Neural Motion Planning for Autonomous Driving
Apr 01, 2024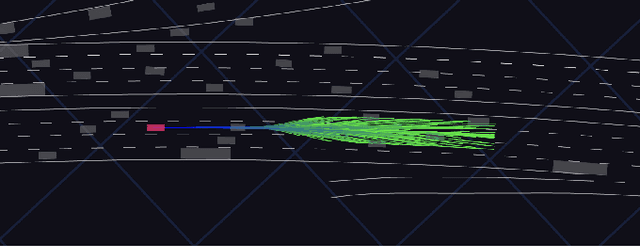
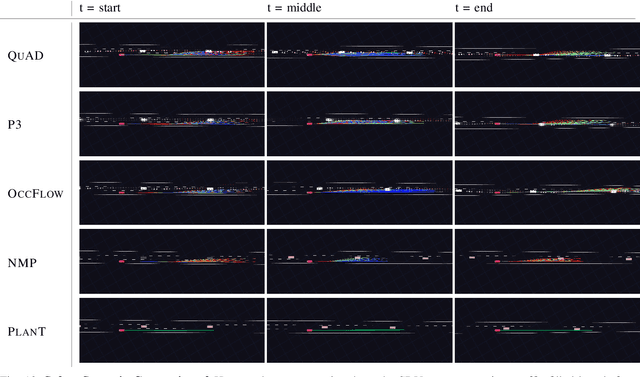
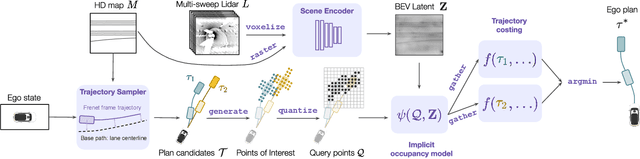
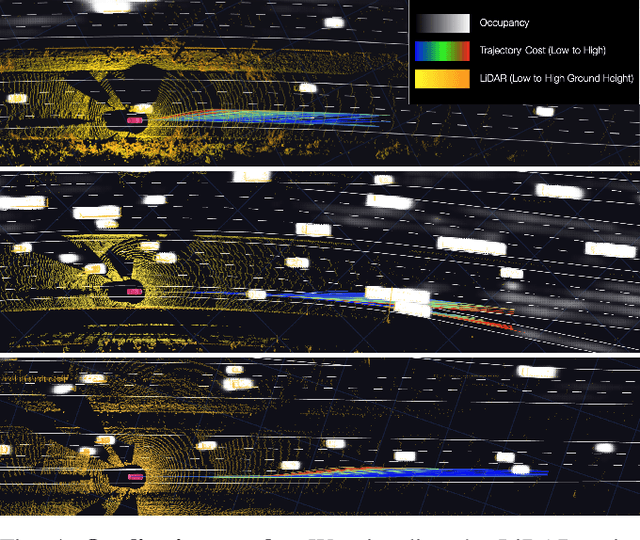
A self-driving vehicle must understand its environment to determine the appropriate action. Traditional autonomy systems rely on object detection to find the agents in the scene. However, object detection assumes a discrete set of objects and loses information about uncertainty, so any errors compound when predicting the future behavior of those agents. Alternatively, dense occupancy grid maps have been utilized to understand free-space. However, predicting a grid for the entire scene is wasteful since only certain spatio-temporal regions are reachable and relevant to the self-driving vehicle. We present a unified, interpretable, and efficient autonomy framework that moves away from cascading modules that first perceive, then predict, and finally plan. Instead, we shift the paradigm to have the planner query occupancy at relevant spatio-temporal points, restricting the computation to those regions of interest. Exploiting this representation, we evaluate candidate trajectories around key factors such as collision avoidance, comfort, and progress for safety and interpretability. Our approach achieves better highway driving quality than the state-of-the-art in high-fidelity closed-loop simulations.
Implicit Occupancy Flow Fields for Perception and Prediction in Self-Driving
Aug 02, 2023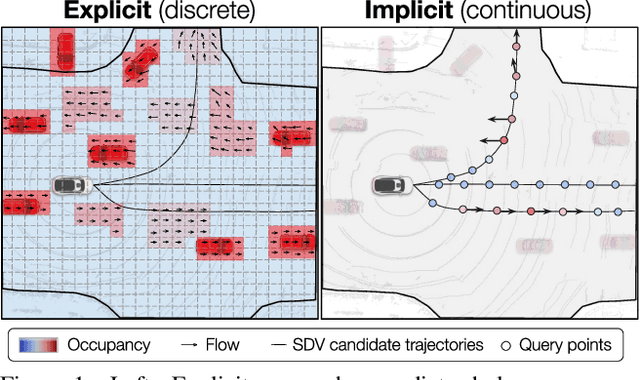
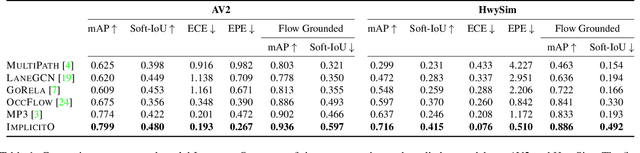
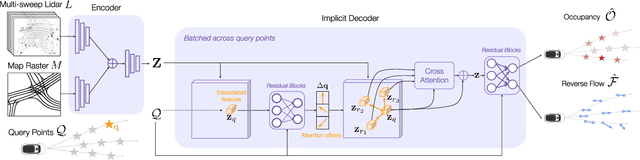
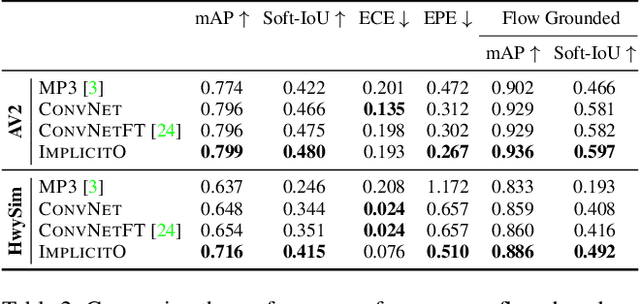
A self-driving vehicle (SDV) must be able to perceive its surroundings and predict the future behavior of other traffic participants. Existing works either perform object detection followed by trajectory forecasting of the detected objects, or predict dense occupancy and flow grids for the whole scene. The former poses a safety concern as the number of detections needs to be kept low for efficiency reasons, sacrificing object recall. The latter is computationally expensive due to the high-dimensionality of the output grid, and suffers from the limited receptive field inherent to fully convolutional networks. Furthermore, both approaches employ many computational resources predicting areas or objects that might never be queried by the motion planner. This motivates our unified approach to perception and future prediction that implicitly represents occupancy and flow over time with a single neural network. Our method avoids unnecessary computation, as it can be directly queried by the motion planner at continuous spatio-temporal locations. Moreover, we design an architecture that overcomes the limited receptive field of previous explicit occupancy prediction methods by adding an efficient yet effective global attention mechanism. Through extensive experiments in both urban and highway settings, we demonstrate that our implicit model outperforms the current state-of-the-art. For more information, visit the project website: https://waabi.ai/research/implicito.
* 19 pages, 13 figures
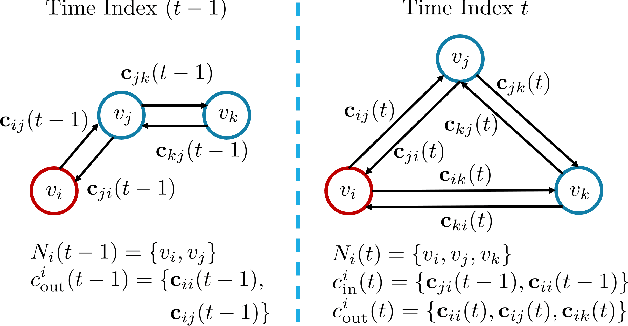
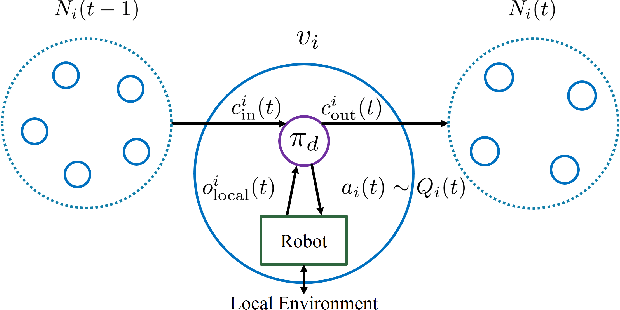
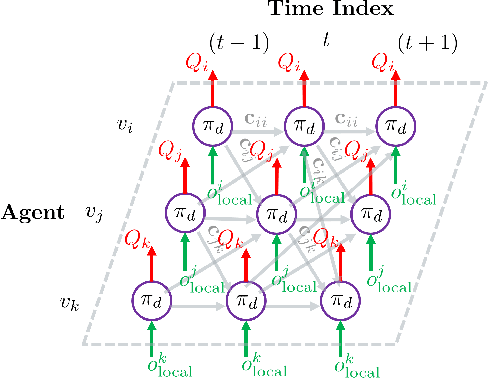
Multi-Agent Routing Value Iteration Network
Jul 09, 2020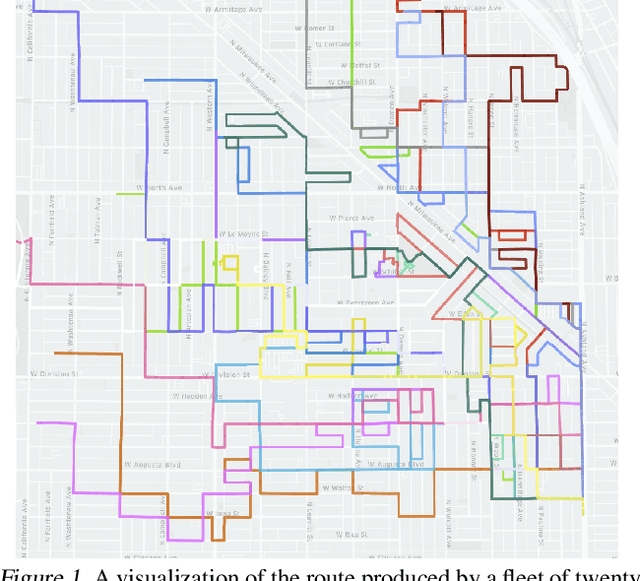
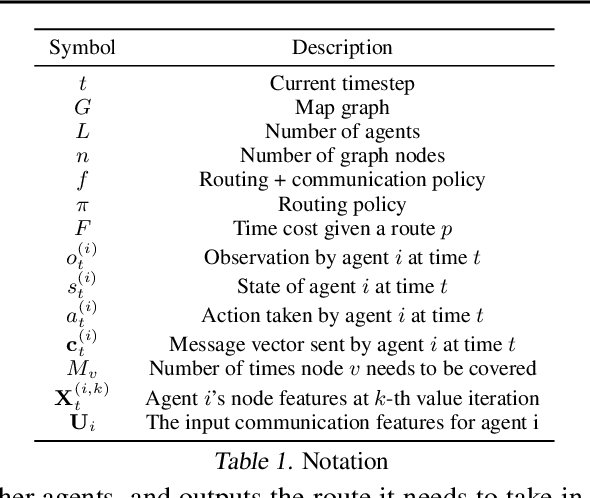
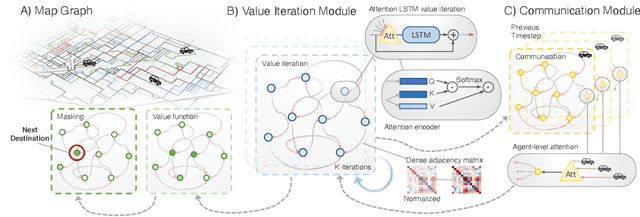
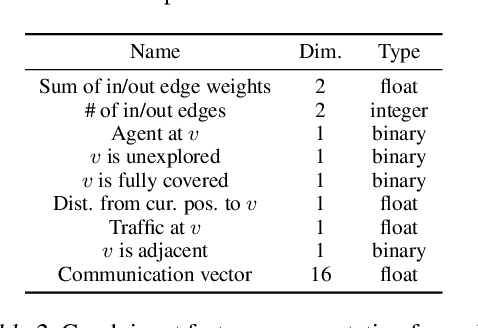
In this paper we tackle the problem of routing multiple agents in a coordinated manner. This is a complex problem that has a wide range of applications in fleet management to achieve a common goal, such as mapping from a swarm of robots and ride sharing. Traditional methods are typically not designed for realistic environments hich contain sparsely connected graphs and unknown traffic, and are often too slow in runtime to be practical. In contrast, we propose a graph neural network based model that is able to perform multi-agent routing based on learned value iteration in a sparsely connected graph with dynamically changing traffic conditions. Moreover, our learned communication module enables the agents to coordinate online and adapt to changes more effectively. We created a simulated environment to mimic realistic mapping performed by autonomous vehicles with unknown minimum edge coverage and traffic conditions; our approach significantly outperforms traditional solvers both in terms of total cost and runtime. We also show that our model trained with only two agents on graphs with a maximum of 25 nodes can easily generalize to situations with more agents and/or nodes.
Zeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020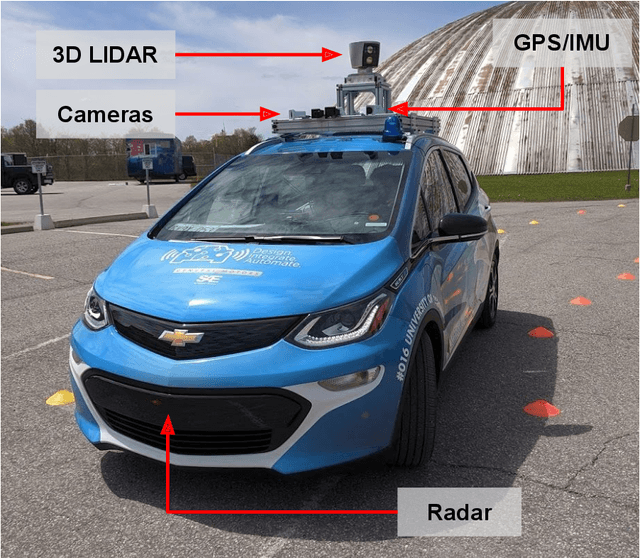
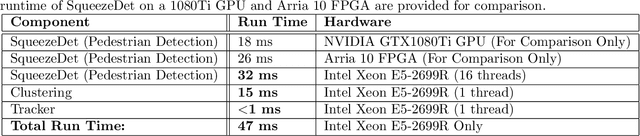
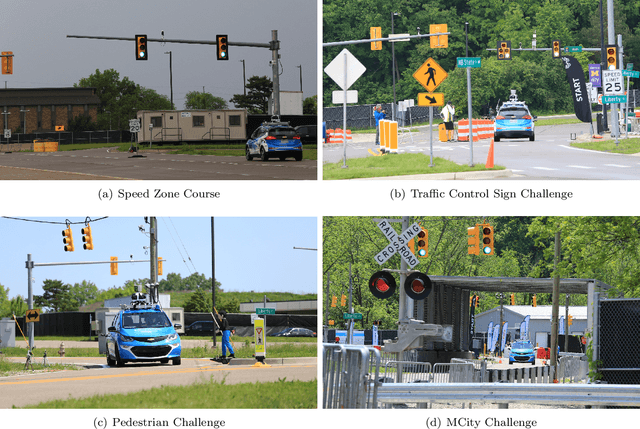
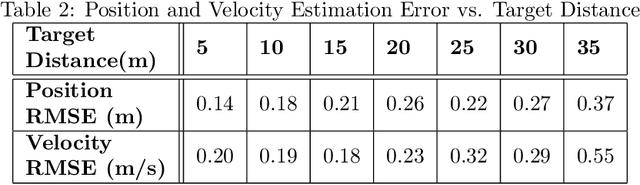
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.
Learning of Coordination Policies for Robotic Swarms
Sep 19, 2017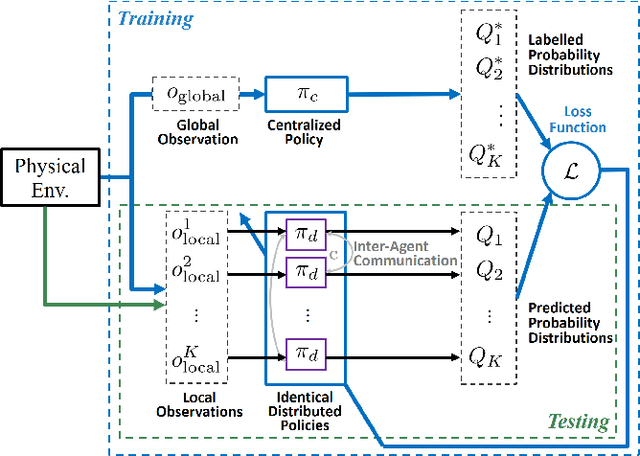
Inspired by biological swarms, robotic swarms are envisioned to solve real-world problems that are difficult for individual agents. Biological swarms can achieve collective intelligence based on local interactions and simple rules; however, designing effective distributed policies for large-scale robotic swarms to achieve a global objective can be challenging. Although it is often possible to design an optimal centralized strategy for smaller numbers of agents, those methods can fail as the number of agents increases. Motivated by the growing success of machine learning, we develop a deep learning approach that learns distributed coordination policies from centralized policies. In contrast to traditional distributed control approaches, which are usually based on human-designed policies for relatively simple tasks, this learning-based approach can be adapted to more difficult tasks. We demonstrate the efficacy of our proposed approach on two different tasks, the well-known rendezvous problem and a more difficult particle assignment problem. For the latter, no known distributed policy exists. From extensive simulations, it is shown that the performance of the learned coordination policies is comparable to the centralized policies, surpassing state-of-the-art distributed policies. Thereby, our proposed approach provides a promising alternative for real-world coordination problems that would be otherwise computationally expensive to solve or intangible to explore.