 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptive Hierarchical-Task MPC for Sequential Mobile Manipulation in Unstructured Semi-Static Environments
Mar 10, 2026As compared to typical mobile manipulation tasks, sequential mobile manipulation poses a unique challenge -- as the robot operates over extended periods, successful task completion is not solely dependent on consistent motion generation but also on the robot's awareness and adaptivity to changes in the operating environment. While existing motion planners can generate whole-body trajectories to complete sequential tasks, they typically assume that the environment remains static and rely on precomputed maps. This assumption often breaks down during long-term operations, where semi-static changes such as object removal, introduction, or shifts are common. In this work, we propose a novel perceptive hierarchical-task model predictive control (HTMPC) framework for efficient sequential mobile manipulation in unstructured, changing environments. To tackle the challenge, we leverage a Bayesian inference framework to explicitly model object-level changes and thereby maintain a temporally accurate representation of the 3D environment; this up-to-date representation is embedded in a lexicographic optimization framework to enable efficient execution of sequential tasks. We validate our perceptive HTMPC approach through both simulated and real-robot experiments. In contrast to baseline methods, our approach systematically accounts for moved and phantom obstacles, successfully completing sequential tasks with higher efficiency and reactivity, without relying on prior maps or external infrastructure.
Hierarchical Task Model Predictive Control for Sequential Mobile Manipulation Tasks
Mar 10, 2026Mobile manipulators are envisioned to serve more complex roles in people's everyday lives. With recent breakthroughs in large language models, task planners have become better at translating human verbal instructions into a sequence of tasks. However, there is still a need for a decision-making algorithm that can seamlessly interface with the high-level task planner to carry out the sequence of tasks efficiently. In this work, building on the idea of nonlinear lexicographic optimization, we propose a novel Hierarchical-Task Model Predictive Control framework that is able to complete sequential tasks with improved performance and reactivity by effectively leveraging the robot's redundancy. Compared to the state-of-the-art task-prioritized inverse kinematic control method, our approach has improved hierarchical trajectory tracking performance by 42% on average when facing task changes, robot singularity and reference variations. Compared to a typical single-task architecture, our proposed hierarchical task control architecture enables the robot to traverse a shorter path in task space and achieves an execution time 2.3 times faster when executing a sequence of delivery tasks. We demonstrated the results with real-world experiments on a 9 degrees of freedom mobile manipulator.
Zeus: A System Description of the Two-Time Winner of the Collegiate SAE AutoDrive Competition
Apr 19, 2020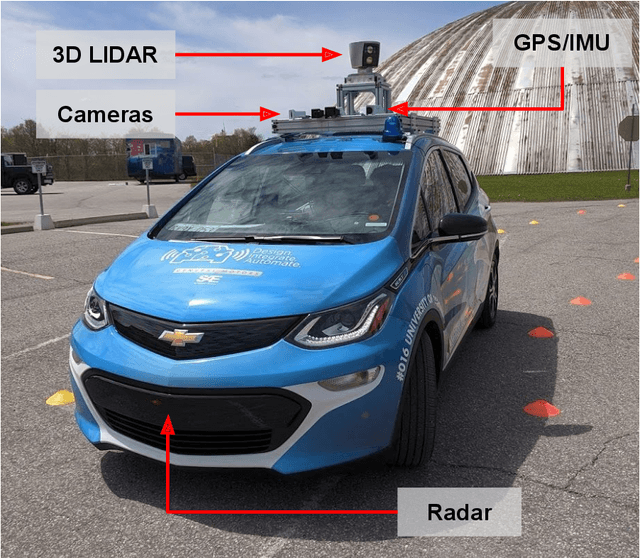
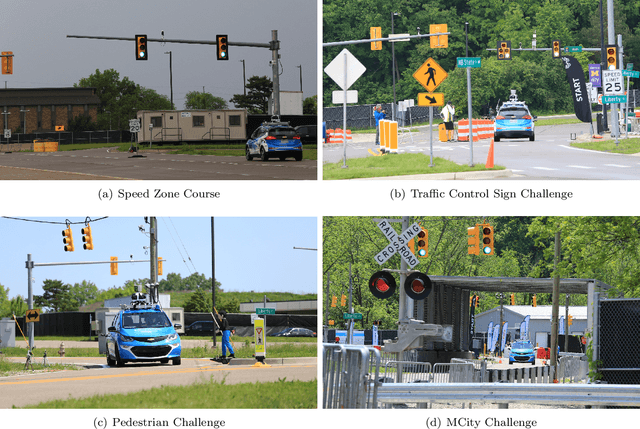
The SAE AutoDrive Challenge is a three-year collegiate competition to develop a self-driving car by 2020. The second year of the competition was held in June 2019 at MCity, a mock town built for self-driving car testing at the University of Michigan. Teams were required to autonomously navigate a series of intersections while handling pedestrians, traffic lights, and traffic signs. Zeus is aUToronto's winning entry in the AutoDrive Challenge. This article describes the system design and development of Zeus as well as many of the lessons learned along the way. This includes details on the team's organizational structure, sensor suite, software components, and performance at the Year 2 competition. With a team of mostly undergraduates and minimal resources, aUToronto has made progress towards a functioning self-driving vehicle, in just two years. This article may prove valuable to researchers looking to develop their own self-driving platform.
The Phoenix Drone: An Open-Source Dual-Rotor Tail-Sitter Platform for Research and Education
Mar 13, 2019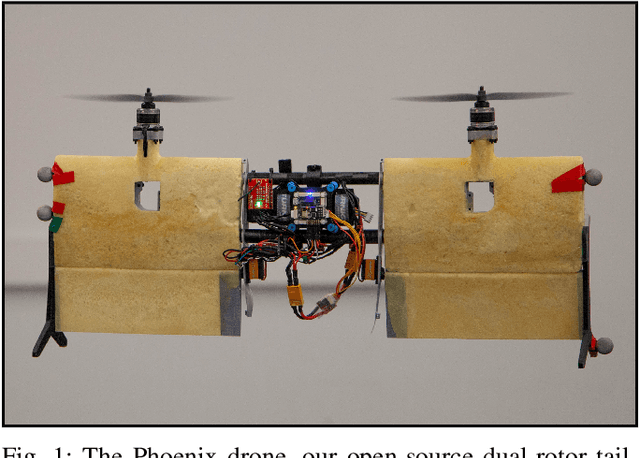
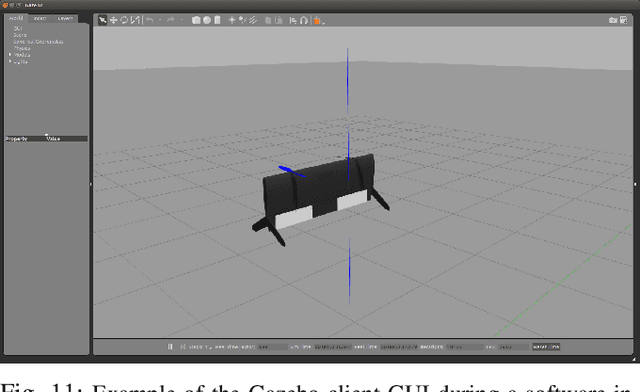
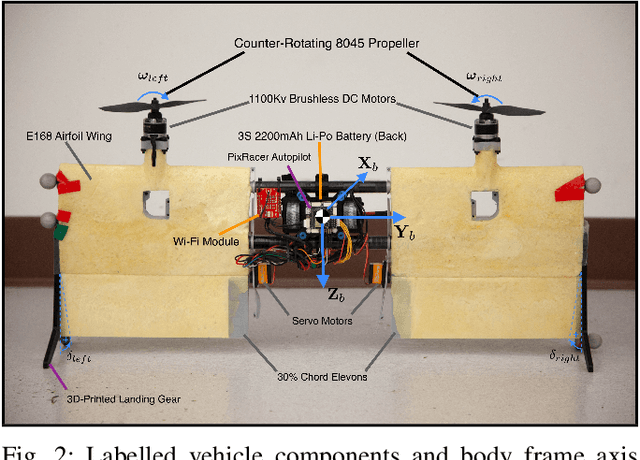
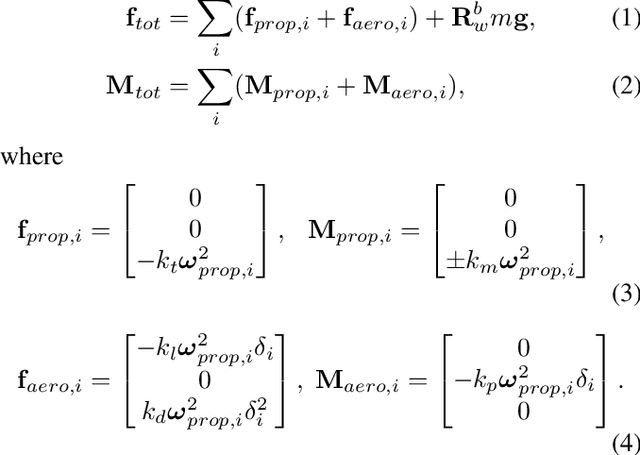
In this paper, we introduce the Phoenix drone: the first completely open-source tail-sitter micro aerial vehicle (MAV) platform. The vehicle has a highly versatile, dual-rotor design and is engineered to be low-cost and easily extensible/modifiable. Our open-source release includes all of the design documents, software resources, and simulation tools needed to build and fly a high-performance tail-sitter for research and educational purposes. The drone has been developed for precision flight with a high degree of control authority. Our design methodology included extensive testing and characterization of the aerodynamic properties of the vehicle. The platform incorporates many off-the-shelf components and 3D-printed parts, in order to keep the cost down. Nonetheless, the paper includes results from flight trials which demonstrate that the vehicle is capable of very stable hovering and accurate trajectory tracking. Our hope is that the open-source Phoenix reference design will be useful to both researchers and educators. In particular, the details in this paper and the available open-source materials should enable learners to gain an understanding of aerodynamics, flight control, state estimation, software design, and simulation, while experimenting with a unique aerial robot.
Fast and In Sync: Periodic Swarm Patterns for Quadrotors
Oct 08, 2018



This paper aims to design quadrotor swarm performances, where the swarm acts as an integrated, coordinated unit embodying moving and deforming objects. We divide the task of creating a choreography into three basic steps: designing swarm motion primitives, transitioning between those movements, and synchronizing the motion of the drones. The result is a flexible framework for designing choreographies comprised of a wide variety of motions. The motion primitives can be intuitively designed using few parameters, providing a rich library for choreography design. Moreover, we combine and adapt existing goal assignment and trajectory generation algorithms to maximize the smoothness of the transitions between motion primitives. Finally, we propose a correction algorithm to compensate for motion delays and synchronize the motion of the drones to a desired periodic motion pattern. The proposed methodology was validated experimentally by generating and executing choreographies on a swarm of 25 quadrotors.
Learning of Coordination Policies for Robotic Swarms
Sep 19, 2017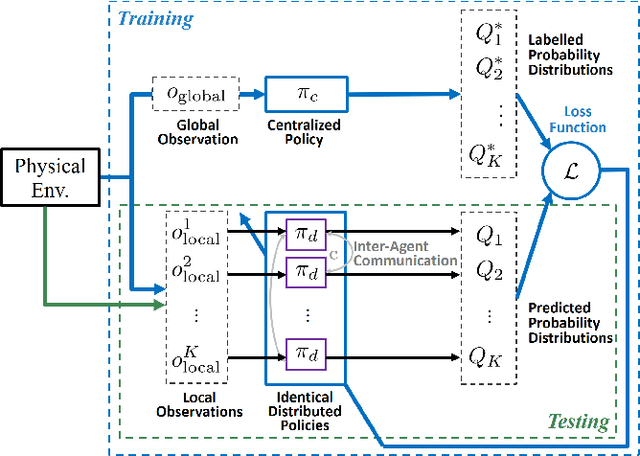
Inspired by biological swarms, robotic swarms are envisioned to solve real-world problems that are difficult for individual agents. Biological swarms can achieve collective intelligence based on local interactions and simple rules; however, designing effective distributed policies for large-scale robotic swarms to achieve a global objective can be challenging. Although it is often possible to design an optimal centralized strategy for smaller numbers of agents, those methods can fail as the number of agents increases. Motivated by the growing success of machine learning, we develop a deep learning approach that learns distributed coordination policies from centralized policies. In contrast to traditional distributed control approaches, which are usually based on human-designed policies for relatively simple tasks, this learning-based approach can be adapted to more difficult tasks. We demonstrate the efficacy of our proposed approach on two different tasks, the well-known rendezvous problem and a more difficult particle assignment problem. For the latter, no known distributed policy exists. From extensive simulations, it is shown that the performance of the learned coordination policies is comparable to the centralized policies, surpassing state-of-the-art distributed policies. Thereby, our proposed approach provides a promising alternative for real-world coordination problems that would be otherwise computationally expensive to solve or intangible to explore.