 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Representations in State-Space Layers for Deep Reinforcement Learning under Partial Observability
Sep 25, 2024



Optimal decision-making under partial observability requires reasoning about the uncertainty of the environment's hidden state. However, most reinforcement learning architectures handle partial observability with sequence models that have no internal mechanism to incorporate uncertainty in their hidden state representation, such as recurrent neural networks, deterministic state-space models and transformers. Inspired by advances in probabilistic world models for reinforcement learning, we propose a standalone Kalman filter layer that performs closed-form Gaussian inference in linear state-space models and train it end-to-end within a model-free architecture to maximize returns. Similar to efficient linear recurrent layers, the Kalman filter layer processes sequential data using a parallel scan, which scales logarithmically with the sequence length. By design, Kalman filter layers are a drop-in replacement for other recurrent layers in standard model-free architectures, but importantly they include an explicit mechanism for probabilistic filtering of the latent state representation. Experiments in a wide variety of tasks with partial observability show that Kalman filter layers excel in problems where uncertainty reasoning is key for decision-making, outperforming other stateful models.
Information-Theoretic Safe Bayesian Optimization
Feb 23, 2024We consider a sequential decision making task, where the goal is to optimize an unknown function without evaluating parameters that violate an a~priori unknown (safety) constraint. A common approach is to place a Gaussian process prior on the unknown functions and allow evaluations only in regions that are safe with high probability. Most current methods rely on a discretization of the domain and cannot be directly extended to the continuous case. Moreover, the way in which they exploit regularity assumptions about the constraint introduces an additional critical hyperparameter. In this paper, we propose an information-theoretic safe exploration criterion that directly exploits the GP posterior to identify the most informative safe parameters to evaluate. The combination of this exploration criterion with a well known Bayesian optimization acquisition function yields a novel safe Bayesian optimization selection criterion. Our approach is naturally applicable to continuous domains and does not require additional explicit hyperparameters. We theoretically analyze the method and show that we do not violate the safety constraint with high probability and that we learn about the value of the safe optimum up to arbitrary precision. Empirical evaluations demonstrate improved data-efficiency and scalability.
Model-Based Epistemic Variance of Values for Risk-Aware Policy Optimization
Dec 13, 2023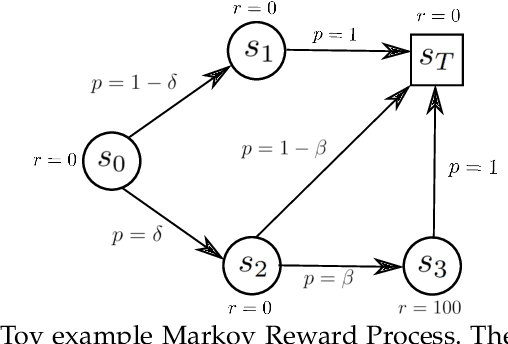



We consider the problem of quantifying uncertainty over expected cumulative rewards in model-based reinforcement learning. In particular, we focus on characterizing the variance over values induced by a distribution over MDPs. Previous work upper bounds the posterior variance over values by solving a so-called uncertainty Bellman equation (UBE), but the over-approximation may result in inefficient exploration. We propose a new UBE whose solution converges to the true posterior variance over values and leads to lower regret in tabular exploration problems. We identify challenges to apply the UBE theory beyond tabular problems and propose a suitable approximation. Based on this approximation, we introduce a general-purpose policy optimization algorithm, Q-Uncertainty Soft Actor-Critic (QU-SAC), that can be applied for either risk-seeking or risk-averse policy optimization with minimal changes. Experiments in both online and offline RL demonstrate improved performance compared to other uncertainty estimation methods.
Value-Distributional Model-Based Reinforcement Learning
Aug 12, 2023Quantifying uncertainty about a policy's long-term performance is important to solve sequential decision-making tasks. We study the problem from a model-based Bayesian reinforcement learning perspective, where the goal is to learn the posterior distribution over value functions induced by parameter (epistemic) uncertainty of the Markov decision process. Previous work restricts the analysis to a few moments of the distribution over values or imposes a particular distribution shape, e.g., Gaussians. Inspired by distributional reinforcement learning, we introduce a Bellman operator whose fixed-point is the value distribution function. Based on our theory, we propose Epistemic Quantile-Regression (EQR), a model-based algorithm that learns a value distribution function that can be used for policy optimization. Evaluation across several continuous-control tasks shows performance benefits with respect to established model-based and model-free algorithms.
Model-Based Uncertainty in Value Functions
Mar 07, 2023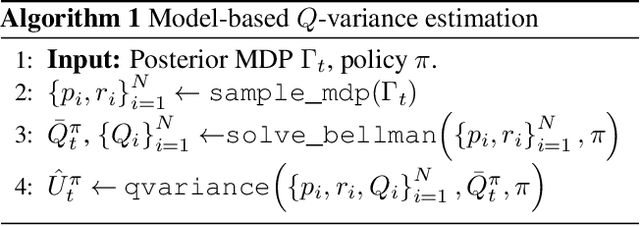
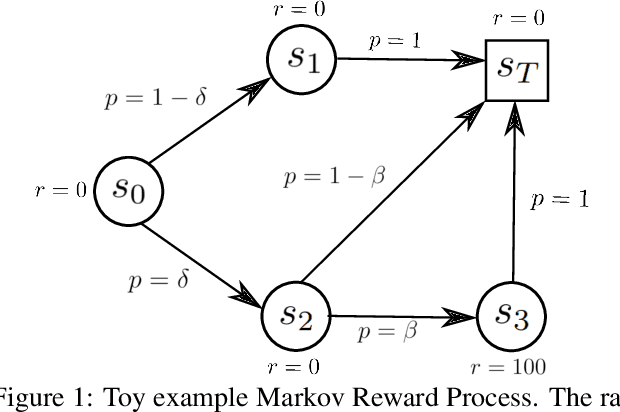
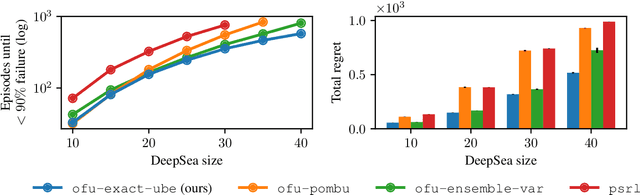
We consider the problem of quantifying uncertainty over expected cumulative rewards in model-based reinforcement learning. In particular, we focus on characterizing the variance over values induced by a distribution over MDPs. Previous work upper bounds the posterior variance over values by solving a so-called uncertainty Bellman equation, but the over-approximation may result in inefficient exploration. We propose a new uncertainty Bellman equation whose solution converges to the true posterior variance over values and explicitly characterizes the gap in previous work. Moreover, our uncertainty quantification technique is easily integrated into common exploration strategies and scales naturally beyond the tabular setting by using standard deep reinforcement learning architectures. Experiments in difficult exploration tasks, both in tabular and continuous control settings, show that our sharper uncertainty estimates improve sample-efficiency.
Information-Theoretic Safe Exploration with Gaussian Processes
Dec 09, 2022



We consider a sequential decision making task where we are not allowed to evaluate parameters that violate an a priori unknown (safety) constraint. A common approach is to place a Gaussian process prior on the unknown constraint and allow evaluations only in regions that are safe with high probability. Most current methods rely on a discretization of the domain and cannot be directly extended to the continuous case. Moreover, the way in which they exploit regularity assumptions about the constraint introduces an additional critical hyperparameter. In this paper, we propose an information-theoretic safe exploration criterion that directly exploits the GP posterior to identify the most informative safe parameters to evaluate. Our approach is naturally applicable to continuous domains and does not require additional hyperparameters. We theoretically analyze the method and show that we do not violate the safety constraint with high probability and that we explore by learning about the constraint up to arbitrary precision. Empirical evaluations demonstrate improved data-efficiency and scalability.
Online Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning
Sep 11, 2019



We present a distributed model predictive control (DMPC) algorithm to generate trajectories in real-time for multiple robots. We adopted the on-demand collision avoidance method presented in previous work to efficiently compute non-colliding trajectories in transition tasks. An event-triggered replanning strategy is proposed to account for disturbances in the system. Our simulation results show that the proposed collision avoidance method can reduce, on average, around 50% of the travel time required to complete a multi-agent point-to-point transition when compared to the well-studied Buffered Voronoi Cells (BVC) approach. Additionally, it shows a higher success rate in transition tasks with a high density of agents, with more than 90% success rate with 30 palm-sized quadrotor agents in a 18 m^3 arena. The approach was experimentally validated with a swarm of up to 20 drones flying in close proximity.
Trajectory Generation for Multiagent Point-To-Point Transitions via Distributed Model Predictive Control
Jan 15, 2019



This paper introduces a novel algorithm for multiagent offline trajectory generation based on distributed model predictive control. Central to the algorithm's scalability and success is the development of an on-demand collision avoidance strategy. By predicting future states and sharing this information with their neighbors, the agents are able to detect and avoid collisions while moving toward their goals. The proposed algorithm can be implemented in a distributed fashion and reduces the computation time by more than 85% compared to previous optimization approaches based on sequential convex programming, while only having a small impact on the optimality of the plans. The approach was validated both through extensive simulations and experimentally with teams of up to 25 quadrotors flying in confined indoor spaces.
* 8 pages, 7 figures
Fast and In Sync: Periodic Swarm Patterns for Quadrotors
Oct 08, 2018



This paper aims to design quadrotor swarm performances, where the swarm acts as an integrated, coordinated unit embodying moving and deforming objects. We divide the task of creating a choreography into three basic steps: designing swarm motion primitives, transitioning between those movements, and synchronizing the motion of the drones. The result is a flexible framework for designing choreographies comprised of a wide variety of motions. The motion primitives can be intuitively designed using few parameters, providing a rich library for choreography design. Moreover, we combine and adapt existing goal assignment and trajectory generation algorithms to maximize the smoothness of the transitions between motion primitives. Finally, we propose a correction algorithm to compensate for motion delays and synchronize the motion of the drones to a desired periodic motion pattern. The proposed methodology was validated experimentally by generating and executing choreographies on a swarm of 25 quadrotors.