 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Trajectory Generation with Distributed Model Predictive Control for Multi-Robot Motion Planning
Sep 11, 2019



We present a distributed model predictive control (DMPC) algorithm to generate trajectories in real-time for multiple robots. We adopted the on-demand collision avoidance method presented in previous work to efficiently compute non-colliding trajectories in transition tasks. An event-triggered replanning strategy is proposed to account for disturbances in the system. Our simulation results show that the proposed collision avoidance method can reduce, on average, around 50% of the travel time required to complete a multi-agent point-to-point transition when compared to the well-studied Buffered Voronoi Cells (BVC) approach. Additionally, it shows a higher success rate in transition tasks with a high density of agents, with more than 90% success rate with 30 palm-sized quadrotor agents in a 18 m^3 arena. The approach was experimentally validated with a swarm of up to 20 drones flying in close proximity.
Hierarchically Consistent Motion Primitives for Quadrotor Coordination
May 01, 2019



We present a hierarchical framework for motion planning of a large collection of agents. The proposed framework starts from low level motion primitives over a gridded workspace and provides a set of rules for constructing higher level motion primitives. Our hierarchical approach is highly scalable and robust making it an ideal tool for planning for multi-agent systems. Results are demonstrated experimentally on a collection of quadrotors that must navigate a cluttered environment while maintaining a formation.
A Modular Framework for Motion Planning using Safe-by-Design Motion Primitives
May 01, 2019



We present a modular framework for solving a motion planning problem among a group of robots. The proposed framework utilizes a finite set of low level motion primitives to generate motions in a gridded workspace. The constraints on allowable sequences of motion primitives are formalized through a maneuver automaton. At the high level, a control policy determines which motion primitive is executed in each box of the gridded workspace. We state general conditions on motion primitives to obtain provably correct behavior so that a library of safe-by-design motion primitives can be designed. The overall framework yields a highly robust design by utilizing feedback strategies at both the low and high levels. We provide specific designs for motion primitives and control policies suitable for multi-robot motion planning; the modularity of our approach enables one to independently customize the designs of each of these components. Our approach is experimentally validated on a group of quadrocopters.
Fast and In Sync: Periodic Swarm Patterns for Quadrotors
Oct 08, 2018



This paper aims to design quadrotor swarm performances, where the swarm acts as an integrated, coordinated unit embodying moving and deforming objects. We divide the task of creating a choreography into three basic steps: designing swarm motion primitives, transitioning between those movements, and synchronizing the motion of the drones. The result is a flexible framework for designing choreographies comprised of a wide variety of motions. The motion primitives can be intuitively designed using few parameters, providing a rich library for choreography design. Moreover, we combine and adapt existing goal assignment and trajectory generation algorithms to maximize the smoothness of the transitions between motion primitives. Finally, we propose a correction algorithm to compensate for motion delays and synchronize the motion of the drones to a desired periodic motion pattern. The proposed methodology was validated experimentally by generating and executing choreographies on a swarm of 25 quadrotors.
Safe and Robust Robot Maneuvers Based on Reach Control
Oct 07, 2016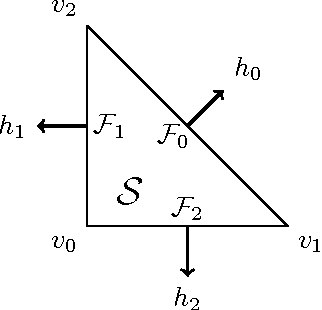
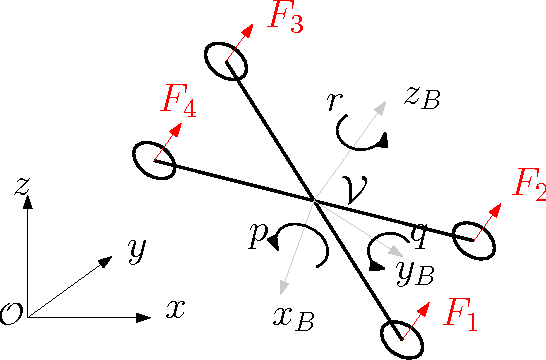
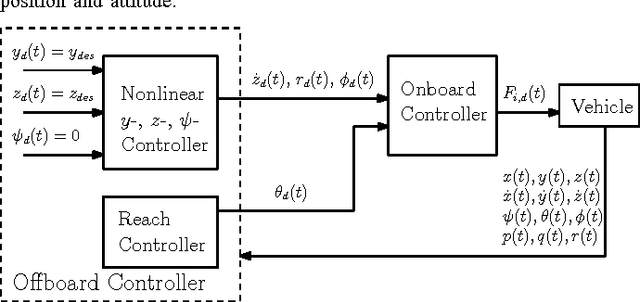
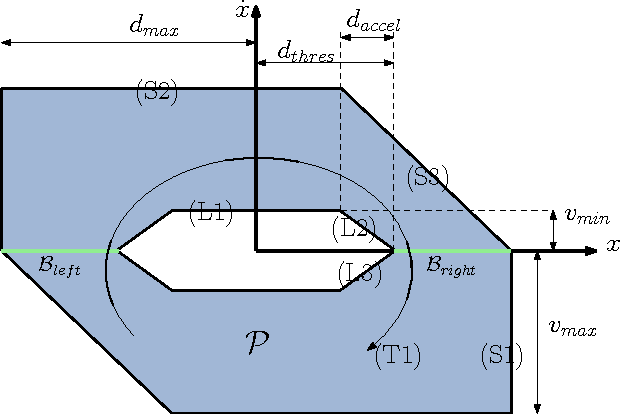
In this paper, we investigate the synthesis of piecewise affine feedback controllers to address the problem of safe and robust controller design in robotics based on high-level controls specifications. The methodology is based on formulating the problem as a collection of reach control problems on a polytopic state space. Reach control has so far only been developed in theory and has not been tested experimentally on a real system before. Using a quadrocopter as our experimental platform, we show that these theoretical tools can achieve fast, albeit safe and robust maneuvers. In contrast to most traditional control techniques, the reach control approach does not require a predefined open-loop reference trajectory or spacial path. Experimental results on a quadrocopter show the effectiveness and robustness of this control approach. In a proof-of-concept demonstration, the reach controller is implemented in one translational direction while the other degrees of freedom are stabilized by separate controllers.