 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Modular Framework for Motion Planning using Safe-by-Design Motion Primitives
May 01, 2019



We present a modular framework for solving a motion planning problem among a group of robots. The proposed framework utilizes a finite set of low level motion primitives to generate motions in a gridded workspace. The constraints on allowable sequences of motion primitives are formalized through a maneuver automaton. At the high level, a control policy determines which motion primitive is executed in each box of the gridded workspace. We state general conditions on motion primitives to obtain provably correct behavior so that a library of safe-by-design motion primitives can be designed. The overall framework yields a highly robust design by utilizing feedback strategies at both the low and high levels. We provide specific designs for motion primitives and control policies suitable for multi-robot motion planning; the modularity of our approach enables one to independently customize the designs of each of these components. Our approach is experimentally validated on a group of quadrocopters.
Building a Winning Self-Driving Car in Six Months
Nov 03, 2018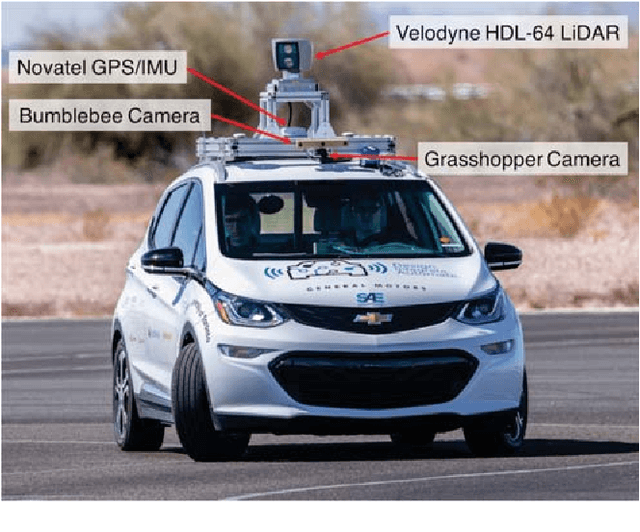
The SAE AutoDrive Challenge is a three-year competition to develop a Level 4 autonomous vehicle by 2020. The first set of challenges were held in April of 2018 in Yuma, Arizona. Our team (aUToronto/Zeus) placed first. In this paper, we describe our complete system architecture and specialized algorithms that enabled us to win. We show that it is possible to develop a vehicle with basic autonomy features in just six months relying on simple, robust algorithms. We do not make use of a prior map. Instead, we have developed a multi-sensor visual localization solution. All of our algorithms run in real-time using CPUs only. We also highlight the closed-loop performance of our system in detail in several experiments.