Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding a Winning Self-Driving Car in Six Months
Paper and Code
Nov 03, 2018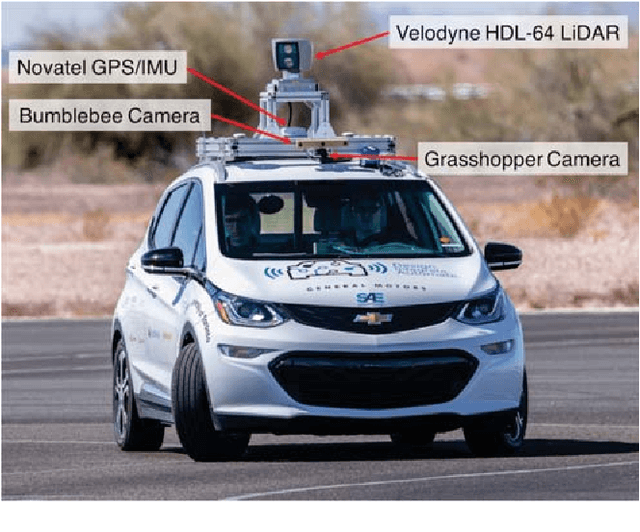
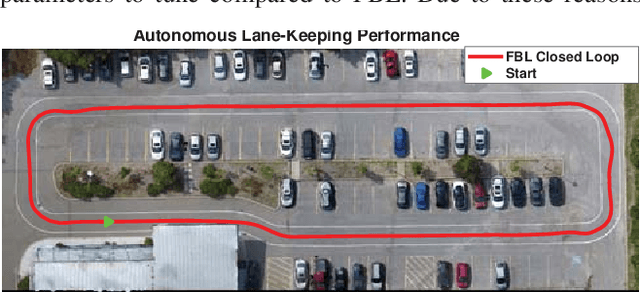
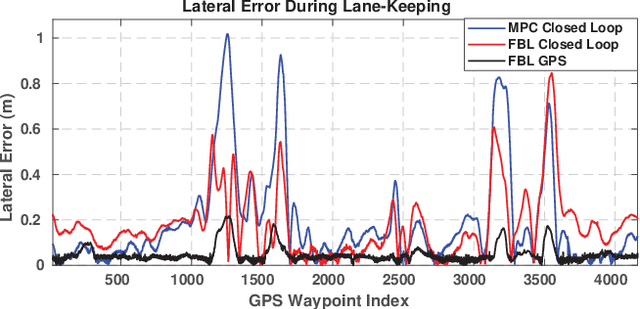
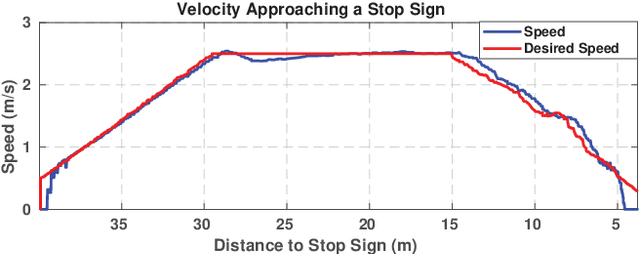
The SAE AutoDrive Challenge is a three-year competition to develop a Level 4 autonomous vehicle by 2020. The first set of challenges were held in April of 2018 in Yuma, Arizona. Our team (aUToronto/Zeus) placed first. In this paper, we describe our complete system architecture and specialized algorithms that enabled us to win. We show that it is possible to develop a vehicle with basic autonomy features in just six months relying on simple, robust algorithms. We do not make use of a prior map. Instead, we have developed a multi-sensor visual localization solution. All of our algorithms run in real-time using CPUs only. We also highlight the closed-loop performance of our system in detail in several experiments.
* This work has been submitted to ICRA 2019
View paper on